У прибора и датчика при неустановившемся режиме измерения возникает динамическая погрешность
У прибора и датчика при неустановившемся режиме измерения возникает динамическая погрешность
 ,
,
где  - закон изменения входного сигнала (внешнее воздействие);
- закон изменения входного сигнала (внешнее воздействие);  - закон изменения выходного сигнала (реакция прибора па внешнее воздействие).
- закон изменения выходного сигнала (реакция прибора па внешнее воздействие).
В общем случае для количественной оценки динамической погрешности необходимо знать:
1) закон изменения входного сигнала, который может быть установлен точно или приблизительно на основании изучения свойств контролируемого объекта;
2) закон изменения выходного сигнала, который зависит не
только от входного сигнала, но и от динамических свойств данного
средства измерения;
В реальных условиях вводные сигналы могут иметь произвольный
характер. Для исследования динамических свойств датчиков и приборов следует выбирать типовые возмущения, которые по возможности
близко отражали бы наиболее существенные особенности реальных
возмущений.
На рис. 129 представлены графики, иллюстрирующие различие выходных сигналов реального и  идеального приборов при различных законах изменения входной величины .
идеального приборов при различных законах изменения входной величины .

Рис.129. Отклонение выходной величины от входной в динамическом режиме: а - при изменении входной величины с постоянной скоростью; б - при ступенчатом изменении входной величины; в - при синусоидальном изменении входной величины
Абсолютная динамическая погрешность в каждый момент времени выражается разностью ординат пунктирной и сплошной линий и, как видно из графиков, зависит от характера изменения входного сигнала. Например, при изменении входной величины с постоянной скоростью динамическая погрешность увеличивается с возрастанием скорости изменения входной величины и при достаточно больших значениях  выходная величина запаздывает относительно
выходная величина запаздывает относительно  на время
на время  (рис, 129,а).
(рис, 129,а).
При синусоидальном изменении входной величины с амплитудой и некоторой постоянной частотой выходная величина в установившемся режиме представляет собой также синусоидальные колебания с амплитудой  той же частоты. Как видно из графика, амплитуда и фаза выходной величины не совпадает с амплитудой и фазой входной величины. Изменение амплитуды и фазовый временной сдвиг выходной величины зависят от свойств средств измерений и частоты вводных колебаний.
той же частоты. Как видно из графика, амплитуда и фаза выходной величины не совпадает с амплитудой и фазой входной величины. Изменение амплитуды и фазовый временной сдвиг выходной величины зависят от свойств средств измерений и частоты вводных колебаний.
Для характеристики динамических свойств измерительных приборов используют ряд параметров, определяемых по переходным характеристикам (функциям). Переходная характеристика представляет собой реакцию динамической системы на единичное ступенчатое воздействие:

На практике используют ступенчатые воздействия произвольного значения. Переходная характеристика  связана с реакцией линейной динамической системы на реальное (неединичное) ступенчатое воздействие
связана с реакцией линейной динамической системы на реальное (неединичное) ступенчатое воздействие  простым соотношением
простым соотношением  где
где  - значение произвольного ступенчатого воздействия.
- значение произвольного ступенчатого воздействия.
Переходная характеристика может иметь апериодическую (рис. 130,а) или колебательную (рис. 130,б) формы.

Рис. 130. Переходные функции средств измерений а - с апериодической и б - колебательной формой переходного процесса
Динамические характеристики линейного средства измерения не зависят от значения и знака ступенчатого возмущения, а переходные характеристики, снятые экспериментально при различных значениях ступенчатых возмущений, должны практически совпадать.
Если опыты при различных по значению и знаку ступенчатых возмущениях приводят к неодинаковым количественным и качественным результатам, то это свидетельствует о нелинейности исследуемого средства измерения.
По переходным характеристикам можно определять ряд используемых на практике параметров, характеризующих динамические свойства измерительного прибора. К ним относятся (см. рис. 130):
- время установления показаний  - время, по истечении которого выходная величина не выходит из заданной зоны, например, ±5% или 1% (на рис. 130 показана пунктиром) от нового установившегося значения выходной величины
- время, по истечении которого выходная величина не выходит из заданной зоны, например, ±5% или 1% (на рис. 130 показана пунктиром) от нового установившегося значения выходной величины  ;
;
- период колебаний  ;
;
- первый выброс выходной величины, определяемый отношением
первой амплитуды  колебаний выходной величины к диапазону измерения;
колебаний выходной величины к диапазону измерения;
- степень затухания  ;
;
- постоянная времени  определяемая как отрезок под касательной, проведен в точке перегиба ;
определяемая как отрезок под касательной, проведен в точке перегиба ;
- время запаздывания  ;
;
- время успокоения  ;
;
По переходной, характеристике, снятой экспериментально, можно определить передаточную функцию, амшгитудно- и фазочастотные характеристики, представляющие собой аппроксимагчлю действительных характеристик приборов.
Динамической погрешностью средства измерений называется разность между погрешностью средства измерений в динамическом режиме и его статической погрешностью, соответствующей значению величины в данный момент времени.
Статической погрешностью средства измерений называется погрешность средства измерений, используемого для измерения постоянной величины.
Динамические погрешности возникают в результате влияния внешних и внутренних сил, масс элементов ИУ, их ускорений под воздействием сил, колебательных процессов. Динамические явления приводят к увеличению погрешности показаний и к запаздыванию появления выходного сигнала. То и другое необходимо принимать во внимание при разработке ИУ. В основе расчета динамических погрешностей лежит уравнение Лагранжа 2-го рода для описания системы с упругими связями
 , (227)
, (227)
где — время;
— кинетическая энергия системы;
 — потенциальная энергия системы;
— потенциальная энергия системы;
 — обобщенная координата;
— обобщенная координата;
 — обобщенная сила.
— обобщенная сила.
Применяя это уравнение к средствам активного контроля изделий, целесообразно представить динамическую модель системы. Рассмотрим ИУ плавающего типа (рис. 131), применяемое при измерении в процессе шлифования валов в центрах, и динамическую
Рнс. 131. Измерительное устройство плавающего типа (а) и динамическая модель системы (б)
модель системы. При рассмотрении движения массы 
 подвеса (без измерительного штока) полагаем точку с неподвижной и получаем упрощенную модель. При рассмотрении движения массы
подвеса (без измерительного штока) полагаем точку с неподвижной и получаем упрощенную модель. При рассмотрении движения массы  измерительного штока полагаем точку
измерительного штока полагаем точку  неподвижной. Составим математическое описание системы с упругими связями
неподвижной. Составим математическое описание системы с упругими связями
 , (228)
, (228)
где  — перемещение массы ;
— перемещение массы ;
 — то же, ;
— то же, ;
 —жесткость пружины
—жесткость пружины  ;
;
 — предварительное натяжение пружины для массы ;
— предварительное натяжение пружины для массы ;
 — то же, для массы ;
— то же, для массы ;
 —сила воздействия изделия на массу ;
—сила воздействия изделия на массу ;
 — то же, на массу .
— то же, на массу .
Решение системы дифференциальных уравнений (228) представлено в виде
 , (229)
, (229)
где  — амплитуда колебания изделия;
— амплитуда колебания изделия;
 — круговая частота колебания изделия;
— круговая частота колебания изделия;
 и
и  — частоты собственных колебаний масс и ;
— частоты собственных колебаний масс и ;
 — сила, действующая на подвес;
— сила, действующая на подвес;
 — измерительное усилие.
— измерительное усилие.
Равенства (229) описывают колебательный процесс (вибрации), в результате которого может произойти отрыв масс или от изделия. В этот момент  или
или  .
.
Механизм образования динамических погрешностей представляем следующим образом. Масса , получив импульс от обрабатываемой детали, по истечении времени  отрывается от нее и через
отрывается от нее и через  достигает вершины своей траектории движения. В это время деталь продолжает свое колебательное движение по закону
достигает вершины своей траектории движения. В это время деталь продолжает свое колебательное движение по закону  и во втором полупериоде воздействует на массу которая в момент времени
и во втором полупериоде воздействует на массу которая в момент времени  отрывается от детали, достигая через интервал времени
отрывается от детали, достигая через интервал времени  максимального отклонения. На основе исследований получены следующие выводы:
максимального отклонения. На основе исследований получены следующие выводы:
а) вибрации измеряемой детали могут вызвать динамическую погрешность ИУ, значение которой в 10 и более раз превысит амплитуду вибрации;
б) динамическая погрешность зависит от сочетания сил и ;
в) с увеличением и увеличивается критическая амплитуда, при которой происходит отрыв измерительных контактов.
Различают четыре вида динамического режима работы пневматических ИУ:
1) послеоперационный и окончательный контроль;
2) активный контроль при постоянной скорости изменения
размера изделия;
3) контроль при вращении детали;
4) контроль в условиях вибраций.
Соответствующие математические описания систем (в последовательности указанных режимов работы):
 ; (230)
; (230)
 ; (231)
; (231)
 ; (232)
; (232)
 ; (233)
; (233)
где

 —частота собственных колебаний, определяемая механическими параметрами (массой, жесткостью, трением);
—частота собственных колебаний, определяемая механическими параметрами (массой, жесткостью, трением);
 ;
;
—приведенная жесткость чувствительных элементов ИУ;
 — приведенная масса подвижных частей ИУ;
— приведенная масса подвижных частей ИУ;
 — кинетическая энергия системы;
— кинетическая энергия системы;
— время;
— постоянная времени, зависящая от пневматических параметров;
 — передаточное отношение механических преобразователей;
— передаточное отношение механических преобразователей;
 — эффективная площадь чувствительного элемента;
— эффективная площадь чувствительного элемента;
 —установившееся измерительное давление;
—установившееся измерительное давление;
 —закон изменения давления в измерительной камере пневматического прибора в зависимости от
—закон изменения давления в измерительной камере пневматического прибора в зависимости от  ;
;
— заданная скорость изменения размера (например, скорость подачи при врезном шлифовании);
 —закон изменения давления в измерительной камере пневматического прибора в зависимости от ;
—закон изменения давления в измерительной камере пневматического прибора в зависимости от ;
 ;
;
—круговая частота вынужденного колебания, рад/с;
 ;
;
 — коэффициент, учитывающий количество изменений амплитуды за один оборот детали (например, при эксцентриситете
— коэффициент, учитывающий количество изменений амплитуды за один оборот детали (например, при эксцентриситете  , при овальности
, при овальности  , при огранке
, при огранке  );
);
 — число оборотов измеряемой детали;
— число оборотов измеряемой детали;
— амплитуда колебаний основания ИУ;
 — приведенная сила неуравновешенных масс подвижных
— приведенная сила неуравновешенных масс подвижных
частей ИУ;
— частота вибрации.
В результате решения дифференциальных уравнений определяют время установления показаний, т. е. интервал времени, длящийся от начала действия на измерительный прибор измеряемой величины до момента, когда показание практически перестает изменяться. Время установления показаний названо временем срабатывания.
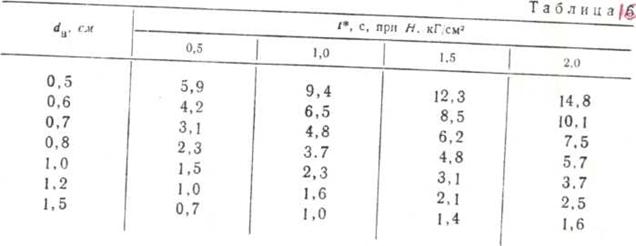
Рабочие формулы для определения времени срабатывания:
 , (234)
, (234)
 , (235)
, (235)
где  — время срабатывания, с;
— время срабатывания, с;
 — постоянная времени;
— постоянная времени;
 — входное давление, кГ/см2;
— входное давление, кГ/см2;
 — объем камеры и трубопроводов в измерительной ветви, мм3;
— объем камеры и трубопроводов в измерительной ветви, мм3;
 — коэффициент расхода, равный отношению действительного расхода воздуха к расчетному;
— коэффициент расхода, равный отношению действительного расхода воздуха к расчетному;
 — диаметр входного сопла, см.
— диаметр входного сопла, см.
Значение соответствует точке перегиба кривой — характеристики  , где
, где  — измерительное давление,
— измерительное давление,  — зазор между торцем измерительного сопла и поверхностью изделия.
— зазор между торцем измерительного сопла и поверхностью изделия.
Составлена таблица для вычисления времени срабатывания пневматического измерительного прибора в зависимости от входного давления и диаметра  входного сопла (табл.16).
входного сопла (табл.16).