Переходим детерминированных значений погрешностей к вероятностным характеристикам. К скалярным первичным погрешностям относятся такие погрешности, которые заданы только величиной (без указания направления). В тех случаях, когда первичная погрешность является функцией неслучайного параметра (времени, размера и др.), значение функции при фиксированном значении аргумента рассматривается как скалярная погрешность. То же относится и к погрешности показаний ИУ.
Пример 1. В рычажной передаче, преобразующей прямолинейное движение также в прямолинейное первичные погрешности заданы доверительными отклонениями  при доверительной вероятности
при доверительной вероятности  0,9973 и нормальном законе распределения со средним значением
0,9973 и нормальном законе распределения со средним значением  и дисперсией
и дисперсией
 .
.
Последнее условие дает основание считать равным нулю математическое ожидание среднего значения погрешности показании:

Дисперсии погрешностей показаний при х = 6
 .
.
Также и
 .
.
Сумма дисперсий

Среднее квадратичное отклонение для 

Доверительное (предельное) отклонение для при доверительной вероятности  = 0,9973 и нормальном распределении (поскольку слагаемые распределены нормально)
= 0,9973 и нормальном распределении (поскольку слагаемые распределены нормально)
 .
.
Доверительный интервал

Интервал между наибольшими возможными абсолютными значениями  равен 0,024 мм. В интервале между 0,017 и 0,024 мм будет только 0,27% случаев появления , этим процентом обычно пренебрегают.
равен 0,024 мм. В интервале между 0,017 и 0,024 мм будет только 0,27% случаев появления , этим процентом обычно пренебрегают.
Пример 2. Для фрикционной передачи от линейки к диску погрешность поворота диска  в зависимости от погрешности его радиуса
в зависимости от погрешности его радиуса  была найдена в детерминированных условиях:
была найдена в детерминированных условиях:

Переходя к вероятностным условиям, находим математическое ожидание, дисперсию и доверительное отклонение для  .
.

Пример 3. Для спускового регулятора с системой баланс—спираль часового механизма погрешность периода колебания  в зависимости от погрешности длины волоска
в зависимости от погрешности длины волоска  была найдена в детерминированных условиях:
была найдена в детерминированных условиях:

 Если будут заданы вероятностные характеристики для погрешности регулировки длины волоска, то характеристики погрешности периода колебания — математическое ожидание среднего значения, дисперсия и доверительное отклонение — составят
Если будут заданы вероятностные характеристики для погрешности регулировки длины волоска, то характеристики погрешности периода колебания — математическое ожидание среднего значения, дисперсия и доверительное отклонение — составят

Пример 4. Для мостовой измерительной электрической
мы влияние погрешностей сопротивлений  и
и  на выходное сопротивление реохорда было определено в детерминированных условиях:
на выходное сопротивление реохорда было определено в детерминированных условиях:

Вероятностные характеристики (в делениях шкалы):

Для примеров 1 — 5, где были найдены методом преобразованных схем детерминированные погрешности на выходе ИУ в зависимости от скалярных первичных погрешностей, вероятностные характеристики составляются так же. Во всех примерах предполагается, что дисперсии независимы. При малом числе слагаемых доверительное отклонение не так сильно отличается от наибольшего возможного значения погрешности, как при большом числе слагаемых.
Пример 5. В суммирующей рычажной передаче прибора БВ-1066 для активного контроля при шлифовании шлицевых валов (рис. 151) длины плеч рычагов, мм:  = 100,
= 100,  = 130,
= 130,  = 130,
= 130,  = 57,
= 57,  = 50,
= 50,  = 100,
= 100,  = 10,
= 10,  = 38,46,
= 38,46,  = 15,6,
= 15,6,  = 30,
= 30,  = 40.
= 40.
ИУ настраивают по индикатору, на который действует плечо 14 рычага. Рабочие сигналы поступают от электроконтактного первичного преобразователя 12, на который действует плечо 11 рычага. Здесь имеется четыре канала связи:
I — от рычага 2 к электроконтактному преобразователю;
II — от рычага 9 к электроконтактному преобразователю;
III — от рычага 2 к индикатору;
IV— от рычага 9 к индикатору.
Рис. 151 Суммирующая рычажная передача прибора БЗ-1066
1 — корпус; 2—11, 13— 15 — плечи рычагов: 12 —электроконтактное приспособление
Рассмотрим канал связи  , полагая рычаг 9 неподвижным. Примем условные данные: припуск на радиус x = 0,1 мм. допуски на длины размеров
, полагая рычаг 9 неподвижным. Примем условные данные: припуск на радиус x = 0,1 мм. допуски на длины размеров  = ±0,2 мм (i = 1, 2, 3,..., 14) при нормальном распределении со средним значением
= ±0,2 мм (i = 1, 2, 3,..., 14) при нормальном распределении со средним значением  .
.
Поставим задачу определить наибольшую возможную погрешность на выходе передачи  и доверительное отклонение для
и доверительное отклонение для  при доверительной вероятности = 0,9973.
при доверительной вероятности = 0,9973.
Связь между входом и выходом по каналу связи выражается равенством

Ввиду малости диапазона изменений входной величины (x= 0,1 мм) погрешность показаний, обусловленная схемой, будет пренебрежимо мала. Учитываем только погрешности длин плеч 
Влияние первичных погрешностей на выходную величину (перемещение конца плеча 9) выявляем по формуле (240) для детерминированных значений. Для определения наибольшего возможного значения погрешности на выходе принимаем знаки первичных погрешностей такими, чтобы результаты их действия имели один знак (например, плюс). Индексы у  обозначают номер (позицию на рисунке) элемента, погрешность которого учитываем:
обозначают номер (позицию на рисунке) элемента, погрешность которого учитываем:
 мкм.
мкм.
Также определяем результаты действия погрешностей других элементов. Получим:  = +0,8 мкм; =+8мкм;
= +0,8 мкм; =+8мкм;  = +0,9 мкм;
= +0,9 мкм;  = +1,8 мкм;
= +1,8 мкм;  = +2,0 мкм;
= +2,0 мкм;  = +1,0 мкм;
= +1,0 мкм;  = +10 мкм;
= +10 мкм;  = +2,6 мкм.
= +2,6 мкм.
Расчет показал, что наибольшее влияние оказывает погрешность длины плеча 10. Целесообразно уменьшить допуск на него в четыре раза с тем, чтобы получить на выходе = +2.5 мкм.
Сумма погрешностей на выходе по каналу I
 = + 0,8 + 0,9+1,8 + 2-4+2,5-2,6= -12,6 мкм.
= + 0,8 + 0,9+1,8 + 2-4+2,5-2,6= -12,6 мкм.
При учете погрешностей по каналу связи II полагаем неподвижным плечо 2. Новыми элементами являются только и , остальные элементы учтены по каналу связи I. Поэтому общую погрешность по каналам связи I и II определяем как сумму
 = 12,6 + 1,0-1-0,8= +14,4 мкм,
= 12,6 + 1,0-1-0,8= +14,4 мкм,
так как  .
.
Расчет на максимум не дает реального результата, потому что вероятности появления указанных погрешностей и необходимого сочетания знаков весьма малы. Реальный результат расчета получают на основе вероятностных характеристик.
В связи с тем, что было принято нормальное распределение для первичных погрешностей со средним значением, равным нулю.

Для нахождения дисперсии вначале предположим, что полученные наибольшие значения Дфг соответствуют доверительным отклонениям при ( = 0,9973 и  = 3. Поэтому
= 3. Поэтому
 = 1,0 мкм.
= 1,0 мкм.
Отсюда

Так же
 и т.д.
и т.д.
10. Особенности использования САПР при проектировании преобразователей и средств измерений.
10.1. Структура САПР.
9. Особенности использования САПР при проектировании преобразователей и средств измерений.
9.1. Оптимальное проектирование как техника качества
Обзор, сделанный Дж. Джураном, показал, что в Японии процент выхода годных кристаллов больших интегральных схем (БИС) выше в 2—3 раза, чем у американских и европейских производителей. Другой анализ, сделанный К. Кларком, показал, что цикл разработки и создания определенного изделия для одной американской электронной компании составил 30 мес, тогда как для японского производителя того же изделия — только 18 мес. К. Кларк определил цикл создания изделия как время от начала разработки до начала его массового производства. Он отметил, что переход от этапа организации проектирования к этапу организации производства для японской компании происходил непосредственно, тогда как для американской компании для этого потребовалось несколько промежуточных стадий.
Методы оптимизации проектирования и процесса производства были развиты в 50—60-х годах, Г. Тагути и Ю. By в связи со стремлением производить высококачественные изделия в экономических условиях, сложившихся в Японии после второй мировой войны. Эти условия характеризовались низким качеством сырья, плохим производственным оборудованием и недостатком хорошо подготовленных инженеров. Сейчас созданные Г. Тагути и Ю. By методы оптимизации используются как стандартные для достижения высокой эффективности проектирования и производства изделия.
9.1.1.Техника качества
Качество изделия можно выразить количественно с помощью общих потерь, которые несет общество с момента поступления изделия потребителю. Потери могут быть вызваны нежелательными побочными эффектами и отклонением качества функционирования изделия от заданного. Здесь мы рассмотрим только потери из-за функциональных отклонений. Например, уровень усиления общественного телефонного аппарата может различаться холодной зимой и жарким летом; он может разниться для различных телефонных аппаратов, а также ухудшаться с течением времени. В большинстве случаев эти потери можно оценить с помощью квадратичной функции потерь.
На функционирование изделия часто влияют так называемые факторы помех. Существуют три типа факторов помех.
1. Внешние, относительно изделия, такие, как условия нагружения, температура, влажность, пыль, напряжение питания, вибрации, вызванные работающим рядом механизмом, и ошибки человека яри эксплуатации изделия.
2. Несовершенства производства. К ним относится изменчивость выходных характеристик для различных единиц изделия. Ее возникновение неизбежно в ходе производственного процесса. Пример несовершенства производства — отклонение сопротивления резистора от номинального значения 100 кОм, которое в каком-то экземпляре изделия может принять значение 101 кОм.
3.Деградация. В начале эксплуатации все выходные характеристики изделия могут совпадать с заданными значениями, но год от года значения отдельных характеристик могут изменяться, что приводит к деградации свойств.
Один подход к уменьшению изменчивости функциональных характеристик изделия состоит в ограничении факторов помех или в их полном устранении. Он состоит в выборе таких значений параметров проектирования, чтобы минимизировать чувствительность ко всем факторам помех. Такой способ включает использование нелинейности соотношений между управляемыми факторами, факторами помех и переменными отклика. Здесь под управляемыми факторами мы подразумеваем факторы или параметры, чьи уровни или значения устанавливаются разработчиком.
Отметим, что при проектировании изделия его можно сделать робастным, т. е. нечувствительным ко всем трем типам факторов помех, описанных выше, тогда как при проектировании процесса производства и в процессе производства можно только уменьшить изменчивость, вызванную несовершенствами производства. Когда изделие находится у потребителя, то только гарантийной службе следует адресовать проблемы качества, связанные с качеством изделия. Таким образом, главная ответственность за качество лежит на разработчике изделия, а не на организаторах производства.
Существуют три основных этапа в проектировании изделия или процесса производства: системное проектирование; параметрическое или оптимальное проектирование; проектирование допусков. Суть системного проектирования состоит в создании работоспособной принципиальной схемы или схемы производственного процесса. Роль параметрического или оптимального проектирования состоит в определении уровней управляемых факторов, которые минимизируют чувствительность ко всем факторам помех. На этом этапе допуски полагаются столь широкими, что производственные затраты оказываются малыми. Если параметрическое проектирование не обеспечивает достаточно низкую функциональную изменчивость изделия, то при проектировании допусков ряд из них выборочно уменьшают, с учетом необходимых для этого затрат.
При разработке проекта в США основные усилия сосредоточиваются на системном проектировании, включающем изобретательскую деятельность и использование прикладных наук, и на проектировании допусков, известном так же, как анализ чувствительности. Оптимальное проектирование, которое важно для производства высококачественных изделий при низких затратах, игнорируется.
9.1.2.Проблема оптимального проектирования
На схеме 161 показана блок-схема изделия, которая может быть также использована для представления производственного процесса или даже коммерческой системы. Отклик обозначен как у.

РИС. 161 Блок-схема изделия.
Факторы, влияющие на отклик, могут быть разбиты на четыре следующих класса.
1.Сигнальные факторы, М. Это такие факторы (параметры), которые устанавливаются пользователем или оператором для того, чтобы достичь заданного значения выходной характеристики или выразить желаемый выход. Например, угол поворота руля является сигнальным фактором для механизма управления автомобилем. Установка рычага управления скоростью на вентиляторе и значения 0 и 1, передаваемые в системах связи, — также примеры сигнальных факторов. Сигнальные факторы отбираются инженером на основе инженерных знаний. Иногда используются в комбинации несколько сигнальных факторов. Например, один из них может быть использован для грубой настройки, а другой — для тонкой настройки.
2.Управляемые факторы, z. Это набор параметров изделия, за чьи значения ответственен разработчик. Каждый из управляемых факторов может принимать несколько значений, которые называют уровнями. Цель процесса проектирования — определить наилучшие уровни этих факторов. Для определения наилучших уровней можно использовать разные критерии, например, можно максимизировать стабильность и робастность проектирования при поддержании минимальных затрат.
3.Масштабно-выравнивающие факторы, R. Это специальные виды управляемых факторов, которые можно легко регулировать для достижения желаемого функционального соотношения между сигнальным фактором и откликом у. Например, передаточное число в механизме управления автомобилем можно легко отрегулировать на стадии проектирования изделия для того, чтобы достичь желаемой чувствительности радиуса поворота к изменению угла поворота. Пороговое напряжение в цифровой связи можно легко отрегулировать для того, чтобы изменить относительные ошибки при передаче нуля и единицы.
4. Факторы помех, х. Это неуправляемые факторы, влияющие на отклик у, и их уровни изменяются для разных единиц изделия, условий окружающей среды и моментов времени. Могут быть известны или определены только статистические характеристики факторов помех, но не их действительные значения.
Пусть зависимость отклика у от сигнальных, управляемых масштабно-выравнивающих и связанных с помехами факторов имеет вид:

| (296)
|
Функция  состоит из двух частей:
состоит из двух частей:
1) g(M; z, R) — прогнозируемое и желаемое функциональное соотношение между y и М;
2) е(х, М; z, R) — непрогнозируемая и нежелательная часть.
Имеем:
| у = g(M; z, R) + е(х, М; z, R)
| (297)
|
Если требуется линейное соотношение между у u M, g должно быть линейной функцией от М. Все нелинейные члены будут включены в е. Влияние всех факторов помех также выражается функцией е.
Цель проектирования — максимизация прогнозируемой части и минимизация непрогнозируемой части с помощью подходящего выбора уровней z и R. В качестве комбинированной меры степени предсказуемости используется отношение дисперсий- функций g и е.
Степень предсказуемости равна Vg/Ve (Под дисперсиями Vg иVe подразумеваются средние квадратичные отклонения для g(M; z, R) и е(х, М; z, R)).
Отметим, что степень предсказуемости не зависит от масштаба. По аналогии с теорией связи берут 10 lg (степень предсказуемости) и называют эту величину отношением сигнал/шум (S/N). Это отношение является функцией z и R:

| (298)
|
Как указывалось выше, R — специальный управляемый фактор, который используется с целью достижения желаемого функционального соотношения для любого заданного значения х и рациональной разработки изделия, с тем чтобы максимизировать степень предсказуемости. Часто можно определить влияние R на  без выполнения реальных экспериментов для различных значений R. В любом случае мы сначала оцениваем
без выполнения реальных экспериментов для различных значений R. В любом случае мы сначала оцениваем  (z), причем (z) = max (z,R). Оптимальное проектирование выполняется затем в области значения z.
(z), причем (z) = max (z,R). Оптимальное проектирование выполняется затем в области значения z.
Отметим, что из-за присутствия масштабного фактора максимизация (z) приводит к минимизации Ve. Если принять квадратичную функцию потерь, минимизация Ve приведет к минимизации потерь потребителя из-за функциональной изменчивости.
9.1.3.Стратегия оптимизации
Стратегия оптимизации представлена на схеме 162. Эксперименты по оптимизации могут проводиться на объекте или моделироваться с помощью программного обеспечения и математической модели изделия. Они начинаются с выбора отклика, который нужно оптимизировать, и четырех типов факторов (управляемых, сигнальных, масштабно-выравнивающих и связанных с помехами) для анализа. С помощью ортогональной матрицы затем отбирается совокупность n значений управляемых факторов z. Для каждого отобранного значения z ( ) проводятся эксперименты посредством моделирования помехи х и желаемого диапазона М.
) проводятся эксперименты посредством моделирования помехи х и желаемого диапазона М.

Рис. 162 Стратегия оптимизации
Эксперименты, проводимые на основе ортогональных матриц, обеспечивают эффективные способы покрытия пространства помех и сигналов. Следующий шаг — калибровка, масштабирование и выравнивание для оценивания величин S/N, (). Отметим, что на практике нет необходимости определять наилучшее значение масштабно-выравнивающего фактора R для каждого . Достаточно определить ().
После оценивания () для i = 1,..., n проводится анализ средних и дисперсий для определения влияния каждого элемента z на ч. Эта информация затем используется для выбора оптимальных уровней z, которые обозначаются z*.
Следующий шаг — проверочный эксперимент при Z*. Если результаты удовлетворительные, оптимизация заканчивается. Если нет, то проводится повторный анализ данных и/или следующий цикл экспериментов.
9.1.4.Классификация проблем проектирования
Проблемы проектирования можно в широком смысле классифицировать на статические и динамические в зависимости от отсутствия или наличия сигнальных факторов. Другая важная категория — проблемы увеличения срока службы. Статические и динамические проблемы можно далее классифицировать в зависимости от природы сигнального фактора и переменной отклика. Классификация проблем проектирования, которая приведена ниже, очевидно является неполной. Однако указанные классы охватывают большинство инженерных проблем, встречающихся в различных отраслях промышленности. В некоторых случаях отношение S/N детально анализируется, а в других — просто приводится.
Статические проблемы. Они характеризуются отсутствием сигнальных факторов. В зависимости от желаемых значений отклика и того, является ли он непрерывным или дискретным, получаются следующие классы статических проблем.
1.Меньше — лучше. Здесь отклик непрерывный и положительный. Его наиболее желаемое значение равно нулю.
Примеры таких ситуаций — напряжение смещения нуля дифференциального операционного усилителя, загрязнения от завода, ток утечки в интегральных схемах. Целевая функция для этого случая имеет вид
= -10 lg (средний квадрат отклика).
2. Заданное значение отклика. Здесь отклик является непрерывным и имеет неэкстремальное заланн ^е значение.
Примеры таких ситуаций. При производстве интегральных схем требование к фотолитографическому процессу формирования окон состоит в том, чтобы все контактные окна имели заданный размер (например, 3 мкм).
Требование к процессу изготовления медного кабеля заключается в том, чтобы жильная проволока имела постоянное сопротивление на единицу длины. Отношение S/N для этого случая имеет вид

где  и
и  — прогнозируемая и непрогнозируемая составляющие отклика.
— прогнозируемая и непрогнозируемая составляющие отклика.
3. Больше — лучше. Это случай непрерывного отклика, который должен быть как можно большим. Прочность материала — пример такого класса проблем. Отношение S/N в этом случае имеет вид  (средний квадрат величины, обратной отклику).
(средний квадрат величины, обратной отклику).
4. Упорядоченный категориальный отклик. Это случай, когда отклик классифицирован на упорядоченные категории, такие, как очень плохой, плохой, приемлемый, хороший, очень хороший. Наиболее практичный метод анализа таких данных — аккумуляционный анализ, описанный Г. Тагути.
Динамические проблемы. Они характеризуются присутствием сигнальных факторов. В зависимости от природы сигнального фактора и переменной отклика имеются следующие четыре обычно встречающихся типа динамических проблем.
1. Непрерывно-непрерывный (НН). Здесь как сигнальный фактор, так и переменная отклика являются непрерывными величинами.
Разработка аналогового вольтметра или температурного контроллера — примеры проблем типа НН. В этом случае желаемое функциональное соотношение является линейным:

| (299)
|
Функция е содержит также нелинейность соотношения между у и М. Параметры и характеризуют прогнозируемое значение отклика. Они определяются с помощью калибровочного эксперимента и регрессионного анализа. Отношение S/N для типа НН определяется следующим образом:

| (300)
|
где  — дисперсия е, которая является непрогнозируемой и нежелательной частью у'.
— дисперсия е, которая является непрогнозируемой и нежелательной частью у'.
 — это дисперсия прогнозируемой и желаемой части, исключая ее значения для диапазона М.
— это дисперсия прогнозируемой и желаемой части, исключая ее значения для диапазона М.
На примере проектирования вольтметра (вообще для всех проблем разработки приборов) можно показать, что отношение S/N непосредственно относится к ошибке прогноза. В данной проблеме М — прикладываемое напряжение, у — отклонение стрелки прибора (Рис. 163).

Рис. 163 График величины отношения сигнал/шум к величине ошибки прогноза
После формирования уравнения (299) с помощью калибровки для вычисления (прогнозирования) напряжения по наблюдаемому отклонению стрелки можно использовать следующее уравнение:

| (301)
|
Ясно, что дисперсия ошибки прогноза М равна /  Отношение S/N в уравнении (300) является логарифмом обратной величины дисперсии ошибки прогноза.
Отношение S/N в уравнении (300) является логарифмом обратной величины дисперсии ошибки прогноза.
Проблема оптимального проектирования в случае НН состоит в максимизации относительно z.
Требование к разработке вольтметра — обеспечить диапазон напряжений, представленных во всей шкале отклонения стрелки, которая может быть равной, например, 90°. Это требование естественно определяет заданное значение . Для любого z мы можем легко подрегулировать R, которое играет роль передаточного числа, чтобы обеспечить желаемое значение .
Регулировка фактора R не влияет на . Таким образом, нет необходимости определять наилучшее значение R для каждого значения z при проведении экспериментов. В этом главное преимущество использования отношения S/N как меры добротности проектирования.
2. Непрерывно-цифровой (НЦ). Пример типа НЦ — разработка температурного контроллера, вход которого (связанный с датчиком температуры) является непрерывным, а выход (функция включения — выключения источника нагрева) — дискретным. В таких случаях предпочтительнее иметь два раздельных сигнальных фактора: один, М для функции включения, другой, М' для функции выключения. Чтобы вычислить отношение S/N для М, представляют М' как фактор помехи, а при вычислении S/N для М' фактором помехи будет М.
Таким образом можно достичь прогнозируемого независимого управления как по функции включения, так и по функции выключения. В обоих случаях, М и М', форма S/N та же, что и для случая НН.
3. Цифро-непрерывный (ЦН). Разработка цифро-аналогового преобразователя — пример проблемы типа ЦН. Здесь также используется отдельный сигнальный фактор для преобразования нуля и единицы. Рассмотрение двух сигнальных факторов подобно случаю НЦ.
4. Цифро-цифровой (ЦЦ). Разработка системы связи, операционной системы компьютера — примеры типа ЦЦ (сигнальный фактор и отклик выражаются цифровыми значениями). Рассмотрим систему связи.
В табл. 20 приведены частоты обнаружения сигналов, имеющих значения нуль и единица. Вероятность ошибочного определения нуля как единицы равна р, а вероятность неправильного определения единицы как нуля составляет q.
Таблица 20
|
Выходной
сигнал
| Выход (отклик)
|
|
|
|
| Общее число
|
|
| n(1-p)
| np
| n
|
|
| np
| n(1-q)
| n
|
| Общее число
| n(1-p+q)
| n(1+p-q)
| 2n
|
Правильное определение нулей и единиц составляет прогнозируемую часть отклика. Ошибочная классификация — непрогнозируемая часть. С помощью дисперсионного анализа можно вычислить сумму квадратов, связанную с прогнозируемой, Sg и непрогнозируемой, Se, частями следующим образом:



Тогда дисперсии, связанные с непрогнозируемой и прогнозируемой частями, будут выражаться соотношениями


Отношение S/N тогда определится формулой:

| (302)
|
Полученное приближение основано на том допущении, что n велико.
Часто в качестве меры информационной емкости системы связи используют энтропию. Достоинство описанного выше разложения дисперсии на составляющие состоит в том, что его легко обобщить на случай многих составляющих причинных систем Г. Тагути.
Рассмотрим теперь роль выравнивания. Хорошо известно, что система связи неэффективна, если
ошибки передачи нуля и единицы неодинаковы. Более эффективная передача достигается при р = q. Этого легко достичь с помощью операции выравнивания, которая изменяет порог. Как показано на рис.164,
изменение порога от  до
до  уравнивает две ошибки, и новая система стала более эффективной.
уравнивает две ошибки, и новая система стала более эффективной.
Как определить значение р’ = q’, которое является значением ошибки после выравнивания, в соответствии с наблюдаемыми значениями ошибок р и q?
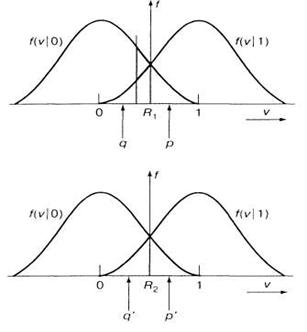
Рис. 164 График изменения порогов масштабно-выравнивающих факторов и
Общая формула, предложенная Г. Тагути для приближенного определения  , является результатом преобразования
, является результатом преобразования
Отношение S/N после выравнивания получается подстановкой р = q = p’ в уравнение (302)

|
(304)
|
Уравнение (304) определяет стандартизованное отношение 5/М Именно это отношение нужно максимизировать по управляемым факторам z.
Для некоторых проблем типа ЦЦ ошибки одного рода могут быть более терпимы, чем ошибки другого рода. Пример такой ситуации — химическое или металлургическое разделение. На стороне входа нуль может обозначать металл, представляющий интерес, скажем железо, а единица — примесь. На стороне выхода нуль может обозначать расплавленный металл, а единица — шлак. В этом случае желаемое отношение р и q можно определить из экономических соображений. Таким образом, даже в этом случае формулу преобразования log// можно использовать для получения желаемого значения.
Проблемы увеличения срока службы связаны с выбором таких уровней управляемых факторов, которые обеспечивают максимум срока службы или его желаемое распределение. Чтобы оценить влияние каждого управляемого фактора на вероятностную кривую срока службы, изучается одновременно большое число
управляемых факторов. Для оценки вероятностных кривых срока службы и выбора оптимальных уровней управляемых факторов используется метод анализа, очень близкий к аккумуляционному анализу.
10.2. Техническое обеспечение.
10.3. Программное обеспечение.
В различных методиках концептуального проектирования используются автоматизированные информационно-поисковые системы (АИПС) с целью нахождения в базе данных рациональных вариантов существующих технических решений (ТР), с заданной степенью удовлетворяющих поставленному техническому заданию (ТЗ).
Вариант автоматизированной системы представляет техническое задание как поисковое предписание — систему ограничений, задаваемую в виде набора идентификаторов функций, выполняемых обобщенным ТР. В системе имеется соответствие между функциями и элементами (узлами, блоками), их выполняющими, а также база данных существующих ТР (каждое ТР состоим из конструктивных узлов и блоков). По этой информации можно построить отбор ТР, формально удовлетворяющих поисковому предписанию. В автоматизированной системе реализован поиск ТР, удовлетворяющих ТЗ. построенному из функциональных и конструктивных требований, которые представлены значениями признаков функционально значимых отношений (ФЗО) на классе ТР. Сами технические решения в этой системе представлены как множества значений признаков ФЗО. Процедура поиска строится на основе использования меры сходства ТР и ТЗ.
Проблема при поиске ТР в перечисленных случаях возникает при переводе исходного ТЗ на языка АИПС. Запрос в упомянутых системах является не только простой лингвистической структурой (простым перечислением идентификаторов из словаря системы, полученном в результате морфологического анализа или анализа ФЗО для класса технических объектов), его исполнение тривиально для поисковых систем и характеризуется выполнением аддитивной функции над обозначениями элементов технической системы (ТС) для получения оценки соответствия техническому заданию. В тоже время ТЗ на проектирование, будучи сформулировано на естественном языке, часто описывает свойства (признаки, критерии качества) для системы в целом – свойства, которые не выводятся из суммы свойств элементов.
Не всегда в ТЗ можно встретить упоминание о желаемой функциональной и конструктивной структуре (шаблоне) ТС. В рассмотренных системах такое преобразование проектировщиком выполняется интуитивно и предполагает несколько вариантов шаблонов ТР, удовлетворяющих ТЗ. Обработка результатов поиска по нескольким шаблонам значительно усложняет процедуру оценки найденных ТР.
В предлагаемом варианте автоматизированной системы анализа и экспертизы ТР реализован метод принятия решений, который используется в процедуре поиска рациональных ТР для устранения недостатков, присущих системам, рассмотренным выше.
Алгоритм поиска рациональных ТР, реализованный в системе, предполагает выполнение следующих шагов (шаги 1—7 выполняют поиск релевантных описаний ТС, а 8—16 описывают метод выбора рационального варианта с помощью системы принятия решений).
Шаг 1. Для выбранного класса ТС определяется семейство множеств признаков функционал




 ;
;
 ;
;




