

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Процедура выполнения команд. Рабочий цикл процессора: Функционирование процессора в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует...
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
Интересное:
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Дисциплины:
|
из
5.00
|
Заказать работу |
При расчете ИУ на точность принимают во внимание лишь те первичные погрешности, которые влияют на выходную величину ИУ: на перемещение подвижного элемента отсчетного устройства, на выходное напряжение и т. п. Рассмотрим метод определения погрешности показаний ИУ по заданным первичным погрешностям. Предполагается, что математическое описание ИУ имеется.
Из определения понятия требуемого точного и действительного значений выходной величины любого устройства следует

где  — требуемое точное («приписанное») показание ИУ;
— требуемое точное («приписанное») показание ИУ;
 — действительное показание ИУ;
— действительное показание ИУ;
 — измеряемая величина;
— измеряемая величина;
 — точное значение параметра схемы ИУ;
— точное значение параметра схемы ИУ;
 — номер параметра ( = 1, 2, 3,...,
— номер параметра ( = 1, 2, 3,...,  );
);
— число параметров;
 — погрешность параметра номер (первичная погрешность).
— погрешность параметра номер (первичная погрешность).
Погрешность показаний ИУ, обусловленная схемой и первичны
ми погрешностями, как и погрешность выходной величины любого
устройства (в том числе погрешность положения выходного звена
механизма), определяется как разность
 . (236)
. (236)
Функция (236) вообще не линейна. Она может быть сложной и лишь в частных случаях линейной. Современная «нелинейная» теория точности исходит из равенства (236), при этом расчеты на точность выполняют с применением электронных вычислительных машин (ЭВМ). Для широкого практического применения приемлемо приближенное решение, в котором функция (236) приводится к линейной. Разложив в ряд Тэйлора первый член правой части равенства (236), получим
 (237)
(237)
Индекс «0» означает, что частную производную берут в точке
(без учета первичных погрешностей). Ограничиваясь двумя первыми членами разложения (237) и подставляя их в равенстве (236) получаем
 . (238)
. (238)
Разность между первым и третьим членами последнего равенства и есть погрешность показаний, обусловленная схемой, т.е.  . Второй член правой части обозначим через
. Второй член правой части обозначим через  , что означает погрешность показаний ИУ, вызванную первичной погрешностью номер . Получим
, что означает погрешность показаний ИУ, вызванную первичной погрешностью номер . Получим
 (239)
(239)
 . (240)
. (240)
Таким образом, функция (236) заменена линейной. Равенство (240) является приближенным, так как при выводе его были отброшены члены, содержащие первичные погрешности в степени 2 и выше. Для подавляющего большинства задач решение по формуле (240) удовлетворяет практические требования.
Поскольку выражение (240) представляет собой линейную функцию, теория, основанная на ее применении, называется «линейной теорией точности» в отличие от современной «нелинейной теории точности». Оставаясь в рамках линейной теории точности можно найти результат совместного действия первичных погрешностей, используя известное выражение для полного дифференциала.
Если дана функция
 ,
,
то полный дифференциал
 , (241)
, (241)
где  — независимые переменные.
— независимые переменные.
Полагая, что достаточно малы по сравнению с и что при установлении  соблюден принцип независимости, по аналогии выражением (241) находим
соблюден принцип независимости, по аналогии выражением (241) находим  —результат совместного действия первичных погрешностей,
—результат совместного действия первичных погрешностей,

лил
 (242)
(242)
Считаем, что  взаимно независимы, поскольку был обусловлен принцип независимости для
взаимно независимы, поскольку был обусловлен принцип независимости для  .
.
Выражение (242) показывает, что результат совместного действия первичных погрешностей на показания ИУ можно, при известных условиях, находить по правилу суперпозиции (наложения). Эти условия следующие:
1) члены разложения в ряд Тэйлсра, содержащие  в степени 2 и выше, пренебрежимо малы;
в степени 2 и выше, пренебрежимо малы;
2) первичные погрешности заданы как взаимно независимые величины;
3) первичные погрешности заданы детерминированными
значениями.
Далее будет рассмотрен расчет на точность с учетом вероятностей появления случайных вариаций значений первичных погрешностей, но для перехода к вероятностным характеристикам в начале должно быть выполнено решение по формуле (242).
Решение задач, относящихся к точности ИУ, основанное на учете только детерминированных значений погрешностей, является необходимым в начальной стадии, но далеко не полным и, во всяком случае, в практическом отношении недостаточным.
По формуле (242) можно вычислить, например, наибольший
возможный результат совместного действия первичных погрешностей на показания ИУ, т. е. выполнить так называемый расчет на
максимум. Однако если окажется, что вероятность появления наибольшего возможного результата действия ничтожно мала, то
расчет «на максимум» даст далеко не полную информацию о действии первичных погрешностей. Значительно более полную информацию дают вероятностные характеристики. Разбор примеров в настоящей лекции ограничен рассмотрением детерминированных погрешностей.
Пример 1. В рычажной передаче, преобразующей прямолинейное движение также в прямолинейное, но иначе направленное, размеры плеч от оси шарнира до центра сферы  ; пределы допускаемых погрешностей размеров плеч
; пределы допускаемых погрешностей размеров плеч  (здесь и в дальнейшем пределы допускаемых погрешностей будут обозначены квадратными скобками). Требуется определить наибольшую возможную погрешность показаний, вызванную первичными погрешностями
(здесь и в дальнейшем пределы допускаемых погрешностей будут обозначены квадратными скобками). Требуется определить наибольшую возможную погрешность показаний, вызванную первичными погрешностями  и
и  .
.
Уравнение связи между и
 ,
,  .
.
Поскольку получена линейная функция  , то при равномерной шкале не будет погрешности, обусловленной схемой, т. е.
, то при равномерной шкале не будет погрешности, обусловленной схемой, т. е.  . Результаты действия первичных погрешностей на показания прибора в детерминированных условиях по формуле (240) при = 6 мм
. Результаты действия первичных погрешностей на показания прибора в детерминированных условиях по формуле (240) при = 6 мм
 ,
,

 .
.
Наибольшего возможного значения сумма погрешностей достигнет при  и
и 

Пример 2. Фрикционную передачу от линейки к диску (рис. 132) применяют для создания образцового движения, с которым сравнивают действительное движение при контроле профиля зубьев зубчатых колес на эвольвентомере с индивидуальным диском. Требуется определить погрешность угла поворота диска в зависимости от погрешности его радиуса.
Уравнение связи между углом поворота диска (выходной величиной) и перемещением линейки (входной величиной) 


Рис. (132) Фрикционная
передача от линейки
к диску
|
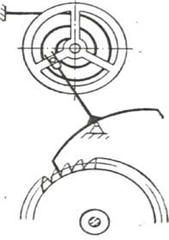
Рис. (133) Спусковой регулятор с системой баланс — спираль
Полученная функция  линейна, следовательно, .
линейна, следовательно, .
Погрешность поворота диска в зависимости от  (в детерминированных условиях)
(в детерминированных условиях)

откуда следует, что погрешность вызывает погрешность показаний  с обратным знаком.
с обратным знаком.
Пример 3. Рассмотрим спусковой регулятор с системой баланс — спираль часового механизма (рис. 133). Период колебания  выражается формулой
выражается формулой

где — длина волоска;
 —ширина волоска;
—ширина волоска;
 — толщина волоска;
— толщина волоска;
 — модуль упругости материала волоска;
— модуль упругости материала волоска;
 — момент инерции баланса.
— момент инерции баланса.
Погрешность периода колебания  в зависимости от погрешности длины волоска
в зависимости от погрешности длины волоска  определяем по формуле (240)
определяем по формуле (240)
 .
.
Введя множитель  , получим
, получим
 .
.
Числовой пример:  .
.
 .
.
Отставание часов за сутки составит
 .
.
Поскольку длину можно регулировать, данное решение используют для определения необходимой чувствительности регулировки.
Пример 4. В мостовой измерительной электросхеме входной величиной является изменение сопротивления  вызванное внешним воздействием. Соответствующий сигнал на выходе выражается величиной
вызванное внешним воздействием. Соответствующий сигнал на выходе выражается величиной  к (частью сопротивления
к (частью сопротивления  реохорда). Требуется определить результаты действия погрешностей сопротивлений
реохорда). Требуется определить результаты действия погрешностей сопротивлений  и
и  на сопротивление .
на сопротивление .
Связь между  и была выяснена. Выразим в числах делений шкалы:
и была выяснена. Выразим в числах делений шкалы:
 ,
,
где  — число делений шкалы в диапазоне измерений;
— число делений шкалы в диапазоне измерений;
 — длина шкалы, соответствующая .
— длина шкалы, соответствующая .
Влияние первичных погрешностей и на выходную величину определяем по формуле (240)
Первичные погрешности ИУ вызывают погрешность его показании, вычисляемую (в рамках линейной теории точности) по формулам (240) и (242)
Во многих задачах величина (показание ИУ) выражается в зависимости от измеряемой величины и параметров схемы ИУ довольно сложной функцией. Отыскание частной производной является иногда трудоемкой операцией.
В некоторых случаях функция  не содержит тех параметров, для которых даны первичные погрешности. Например, эксцентриситет оси звена не входит в выражение для , если номинальное значение эксцентриситета равно нулю. Тогда формула (240) не дает решения. Чтобы облегчить расчеты на точность при сложной функции
не содержит тех параметров, для которых даны первичные погрешности. Например, эксцентриситет оси звена не входит в выражение для , если номинальное значение эксцентриситета равно нулю. Тогда формула (240) не дает решения. Чтобы облегчить расчеты на точность при сложной функции  , а также выявить результаты действия погрешностей параметров, не входящих в выражение , предложен метод определения
, а также выявить результаты действия погрешностей параметров, не входящих в выражение , предложен метод определения  на основе преобразованной схемы, в связи с чем он назван методом преобразованных схем.
на основе преобразованной схемы, в связи с чем он назван методом преобразованных схем.
Академик Н. Г. Бруевич предложил метод преобразованных механизмов, проф. докт. техн. наук М. Л. Быховский — метод преобразованных электрических цепей. В преобразованной схеме ИУ первичная погрешность моделируется с помощью дополнительных звеньев в схеме механизма или дополнительного генератора в электрической цепи, при этом входные параметры прекращают действие: ведущее звено механизма останавливается, питающее напряжение электрической схемы выключается.
Преобразованный механизм получают из заданного механизма следующим образом:
1. Закрепляют ведущее звено в одном заданном положении.
2. Заменяют звено номер  с погрешностью на группу звеньев так, чтобы размер можно было изменять. Полагаю, что размеры прочих звеньев не имеют погрешностей.
с погрешностью на группу звеньев так, чтобы размер можно было изменять. Полагаю, что размеры прочих звеньев не имеют погрешностей.
3. Строят план малых перемещений для преобразованного механизма в определенном масштабе.
4. Пользуясь планом малых перемещений, определяют —
погрешность положения выходного звена, вызванную первичной по
грешностью звена номер .

|
Для преобразования механизмов применяют известные виды элементов кинематических пар, в том числе обычные и сдвоенные ползуны, кулисы и пр.
Рис. 134 крив
Подшипно-шатунный механизм
Пример 1. В кривошипно-шатунном механизме (рис. 134) входная величина  — угол поворота кривошипа, выходная величина — координата, определяющая положение точки
— угол поворота кривошипа, выходная величина — координата, определяющая положение точки  ползуна 4. Связь между входом и выходом определяется выражением
ползуна 4. Связь между входом и выходом определяется выражением

где  — длина кривошипа
— длина кривошипа  ;
;
 — длина шатуна
— длина шатуна  . Пусть заданы первичные погрешности:
. Пусть заданы первичные погрешности:  — смещение направляющих ползуна 4 нормально к оси
— смещение направляющих ползуна 4 нормально к оси  ; — погрешность длины кривошипа;
; — погрешность длины кривошипа;  — погрешность длины шатуна. Требуется найти результат отдельного действия каждой из указанных первичных погрешностей на положение ползуна и совместного действия.
— погрешность длины шатуна. Требуется найти результат отдельного действия каждой из указанных первичных погрешностей на положение ползуна и совместного действия.
Решение находим по методу преобразованных механизмов, так-как, во-первых, параметра  нет в формуле связи
нет в формуле связи  и, во-вторых, частные производные от по
и, во-вторых, частные производные от по  и по
и по  удобнее найти графически, чем аналитически.
удобнее найти графически, чем аналитически.
1. Определим  — погрешность положения ползуна в зависимости от первичной погрешности . Для создания возможностисмещения ползуна 4 нормально к оси вводим кулису. Закрепляем ведущее звено ОА. Получили преобразованный механизм (рис.135), в котором моделируется первичная погрешность . При построении плана малых перемещений (рис. 135,б) для преобразованного механизма откладываем из полюса
— погрешность положения ползуна в зависимости от первичной погрешности . Для создания возможностисмещения ползуна 4 нормально к оси вводим кулису. Закрепляем ведущее звено ОА. Получили преобразованный механизм (рис.135), в котором моделируется первичная погрешность . При построении плана малых перемещений (рис. 135,б) для преобразованного механизма откладываем из полюса  первичную погрешность в виде отрезка
первичную погрешность в виде отрезка  в выбранном масштабе, затем из точки проводим прямую нормально к АВ, соответствующую направлению относительного движения точки В вокруг А, из точки — прямую, параллельную оси (направление движения ползуна).
в выбранном масштабе, затем из точки проводим прямую нормально к АВ, соответствующую направлению относительного движения точки В вокруг А, из точки — прямую, параллельную оси (направление движения ползуна).
На пересечении проведенных прямых получим точку  . Отрезок bb' соответствует величине . Из плана малых перемещений непосредственно получаем
. Отрезок bb' соответствует величине . Из плана малых перемещений непосредственно получаем
 .
.

|
Рис. 135 Преобразованный механизм (а), моделирующий погрешность кривошипно-шатунного механизма, и план малых перемещений (б)
Знак минус следует из того, что и имеют противоположные направления.
Роль частной производной выполняет коэффициент при :
2. Определим  — погрешность положения ползуна в зависимости от первичной погрешности . Введя ползун на звено и закрепив кривошип (чтобы не допустить изменения угла
— погрешность положения ползуна в зависимости от первичной погрешности . Введя ползун на звено и закрепив кривошип (чтобы не допустить изменения угла  ), получим преобразованный механизм (рис. 136, а), в котором моделируется первичная погрешность
), получим преобразованный механизм (рис. 136, а), в котором моделируется первичная погрешность
При построении плана малых перемещений проводим прямую  , выражающую погрешность
, выражающую погрешность  , из точки проводим прямую нормально к (направление относительного движения) и из точки — прямую, параллельную оси . Пересечение прямых в точке определяет длину отрезка , соответствующего погрешности .
, из точки проводим прямую нормально к (направление относительного движения) и из точки — прямую, параллельную оси . Пересечение прямых в точке определяет длину отрезка , соответствующего погрешности .
По плану малых перемещений (рис. 135,б) находим отношение сторон и синусов противолежащих углов:
 ,
,
откуда
 .
.
Частная производная, найденная графическим способом,
 .
.

|
Рис. 136 Преобразованный механизм (а), моделирующий
погрешность кривошипно-шатунного механизма,
и план малых перемещений (б)

Рис. 137 Преобразованный механизм (а), моделирующий
погрешность кривошипно-шатунного механизма,
и план малых перемещений (б)
3. Определим  , — погрешность положения ползуна в зависимости от первичной погрешности . При построении преобразованного механизма вводим сдвоенный ползун, с помощью которого моделируется погрешность . Звено — неподвижно (рис. 137, а). Из плана малых перемещений (рис. 137, б) для преобразованного механизма
, — погрешность положения ползуна в зависимости от первичной погрешности . При построении преобразованного механизма вводим сдвоенный ползун, с помощью которого моделируется погрешность . Звено — неподвижно (рис. 137, а). Из плана малых перемещений (рис. 137, б) для преобразованного механизма
 .
.
Частная производная
 /
/
Пример 2. Для рычажного синусного первичного преобразователя (рис.138, а) требуется определить погрешность угла поворота рычага 3  в зависимости от погрешности длины плеча .
в зависимости от погрешности длины плеча .
Изменение длины плеча  с одновременным горизонтальным перемещением сферы моделируется сдвоенным ползуном. Звено 2 останавливаем. Получаем преобразованный механизм для определения (рис. 138, б). План малых перемещений для преобразованного механизма (рис. 138, в) построен, исходя из предположения, что погрешность увеличивает длину . Перемещение центра сферы относительно оси шарнира (в линейной мере) представлено произведением
с одновременным горизонтальным перемещением сферы моделируется сдвоенным ползуном. Звено 2 останавливаем. Получаем преобразованный механизм для определения (рис. 138, б). План малых перемещений для преобразованного механизма (рис. 138, в) построен, исходя из предположения, что погрешность увеличивает длину . Перемещение центра сферы относительно оси шарнира (в линейной мере) представлено произведением  и графически соответствующим горизонтальным отрезком. Из плана малых перемещений
и графически соответствующим горизонтальным отрезком. Из плана малых перемещений

Знак минус следует из того, что увеличение  ведет к уменьшению . Окончательно
ведет к уменьшению . Окончательно

Этот результат получен по методу преобразованного механизма. Для сравнения методов найдем по формуле (240)

Результаты, естественно, должны совпадать. Из решения видно, что метод преобразованного механизма приводит к сокращению математических операций.
Пример 3. Для рычажного тангенсного первичного преобразователя (рис.139, а) требуется определить погрешность  угла поворота рычага в зависимости от первичной погрешности в корпусе 1 передачи.
угла поворота рычага в зависимости от первичной погрешности в корпусе 1 передачи.

Рис. 138. Рычажный синусный первичный преобразователь:
1 — корпус; 2 — измерительный стержень; 3 — ведущее плечо рычага

|

|
Рис. 139. Рычажный тангенсный первичный преобразователь:
1 — корпус; 2 — измерительный стержень; 3 — ведущее плечо рычага
Изменение расстояния с одновременным изменением длины плеча рычага 3 моделируем с помощью ползуна и направляющей с шарниром А. Ось А неподвижна, так как ведущее звено остановлено. Получили преобразованный механизм (рис. 139,б) (возможны и другие варианты преобразования). План малых перемещений для преобразованного механизма построен, исходя из предположения, что погрешность увеличивает размер  (рис. 139,в).
(рис. 139,в).
Перемещение ползуна в точке В относительно А (в линейной мере) представлено произведением  . Из плана перемещений
. Из плана перемещений

Знак минус следует из того, что увеличение ведет к уменьшению .
 ,
,
так как

Это решение, полученное по методу преобразованного механизма, сравним с решением по формуле (240):
 Выводы относительно метода решения такие же, как в примере 2.
Выводы относительно метода решения такие же, как в примере 2.
Пример 4. Для синусно-кулисной передачи в приборе МИГ (многооборотной измерительной головке) требуется определить погрешность  угла поворота звена 4 в зависимости от погрешности длины
угла поворота звена 4 в зависимости от погрешности длины  .
.
Изменение длины звена 4 с одновременным изменением расстояния ОВ (рис. 140, а) моделируем с помощью сдвоенного ползуна. Остановив звено 2, получаем преобразованный механизм. План малых перемещений (рис. 140, б) для преобразованного механизма построен, исходя из предположения, что погрешность увеличивает длину  .
.
Перемещение точки В относительно О (в линейной мере) представлено произведением  . Из плана малых перемещений
. Из плана малых перемещений

Знак минус следует из того, что увеличение  ведет к уменьшению
ведет к уменьшению 
Окончательно

Это решение, полученное по методу преобразованного механизма, сравним с решением по формуле (240). Была получена получена формула связи между входном и выходом


Рис. 140, а. Преобразованный механизм (а), моделирующнй погрешность синусно-кулисного механизма, и план малых перемещений (б)
Погрешность угла в зависимости от первичной погрешности



Как и в предыдущих примерах, применение метода преобразованного механизма привело к сокращению математических операций.
Метод преобразованной электрической цепи дает возможность определить результат действия первичной погрешности на выходное напряжение. К первичным погрешностям электрической цепи относятся: погрешности омических сопротивлений, сил тока, индуктивностей, емкостей и других электрических параметров. Представим в виде блока электрическую цепь с напряжением на входе и  — на выходе. Выделим из блока один элемент — сопротивление
— на выходе. Выделим из блока один элемент — сопротивление  с погрешностью
с погрешностью  (рис.140,а). Ее влияние на выходное напряжение определяется формулой, аналогичной (240), но отличающейся введением питающего напряжения
(рис.140,а). Ее влияние на выходное напряжение определяется формулой, аналогичной (240), но отличающейся введением питающего напряжения
 (243)
(243)
где  — функция параметров электрической цепи.
— функция параметров электрической цепи.


Рис. вв. Блок электрической цепи с выделенным сопротивлением (а) и преобразованная электрическая цепь, в которой погрешность  в моделируется с помощью генератора Г (б)
в моделируется с помощью генератора Г (б)
Напомним, что задача о влиянии на  решается приближенно, в рамках линейной теории точности. При построении преобразованной электрической цепи моделируем первичную погрешность с помощью дополнительного генератора с электродвижущей силой
решается приближенно, в рамках линейной теории точности. При построении преобразованной электрической цепи моделируем первичную погрешность с помощью дополнительного генератора с электродвижущей силой  , где
, где  — масштаб, в котором представлено действительное падение напряжения, вызванное увеличением сопротивления на . Падение напряжения на участке CD (рис. 140, б)
— масштаб, в котором представлено действительное падение напряжения, вызванное увеличением сопротивления на . Падение напряжения на участке CD (рис. 140, б)

Знак минус означает, что дополнительный источник питания создает между полюсами С и D ток, противоположный основному току. Если закоротить полюса на входе и включить дополнительный генератор с напряжением  , то на выходе будет напряжение
, то на выходе будет напряжение  , представляющее собой результат влияния первичной погрешности в масштабе . Выходное напряжение преобразованной цепи
, представляющее собой результат влияния первичной погрешности в масштабе . Выходное напряжение преобразованной цепи

где  — искомая погрешность выходного напряжения.
— искомая погрешность выходного напряжения.

|

Рис. 141. Делитель напряжения (а) и преобразованная электрическая цепь, в которой погрешность моделируется с помощью генератора Г
Так как

то
 (244)
(244)
В формулах (243) и (244) левые части равны, следовательно, равны и правые
Отсюда значение частной производной
 (245)
(245)
Отношение  определяют из заданной цепи, отношение
определяют из заданной цепи, отношение  — из преобразованной цепи.
— из преобразованной цепи.
Пример 5. Основная схема делителя напряжения (рис. 141, а) содержит три постоянных сопротивления. Найти погрешность выходного сопротивления  , вызванную первичной погрешностью (погрешностью сопротивления
, вызванную первичной погрешностью (погрешностью сопротивления  ). При построении преобразованной электрической цепи (рис. 141,б) закорачиваем полюса на входе и включаем на участке СD дополнительный генератор Г. Далее применим формулу (246) для определения частной производной. Из основной цепи находим отношение —
). При построении преобразованной электрической цепи (рис. 141,б) закорачиваем полюса на входе и включаем на участке СD дополнительный генератор Г. Далее применим формулу (246) для определения частной производной. Из основной цепи находим отношение —  , так как
, так как  , то
, то

Для определения отношения  находим вначале напряжение на выходе преобразованной электрической цепи, рассматривая контур
находим вначале напряжение на выходе преобразованной электрической цепи, рассматривая контур  и применяя второй закон Кирхгофа,
и применяя второй закон Кирхгофа,

то же для контура 
 ;
;
Погрешность выходного напряжения, вызванная первичной погрешностью ,

Теперь найдем погрешность выходного напряжения  , вызванную — погрешностью сопротивления
, вызванную — погрешностью сопротивления  . При построении преобразованной электрической цепи дополнительный генератор напряжением
. При построении преобразованной электрической цепи дополнительный генератор напряжением  включаем перед сопротивлением . Из преобразованной схемы следует, что
включаем перед сопротивлением . Из преобразованной схемы следует, что

Погрешность выходного напряжения, вызванная первичной погрешностью ,

Таким же способом определяем результат действия погрешности  -
-

Погрешность выходного напряжения, вызванная первичной погрешностью  ,
,

Первичные погрешности называются векторными, если они заданы не только величиной, но и углом, определяющим направление вектора на плоскости или в пространстве. Длину вектора называют его модулем. Положение вектора на плоскости определяется одним углом, в пространстве — двумя углами.
По сравнению с методами решения задач, где заданы скалярные погрешности, вопрос о влиянии векторных погрешностей на показания ИУ является более сложным, потому что необходимо рассматривать как случайную не только величину (модуль) векторной погрешности, но и углы, определяющие направление вектора в начальной фазе. Как правило, векторная первичная погрешность дает на выходе ИУ также векторную погрешность показаний. Если погрешность представлена функцией

где — амплитуда;
 — угол начальной фазы (случайный);
— угол начальной фазы (случайный);
— неслучайный угол,
то такая погрешность относится также к векторным, поскольку синусоиду можно представить с помощью вращающегося вектора. В частности, кинематическая погрешность зубчатого колеса является векторной, так как аппроксимируется синусоидой.

Рис. 142. Передача от кулачка к толкателю Рис. 143. Передача от кулачка к рычагу
1-корпус; 2 - кулачок; 3 - ролик
Математическое описание ИУ обычно не содержит параметров, погрешности которых можно отнести к векторным (например, эксцентриситеты и перекосы осей). Поэтому определение результата действия векторной погрешности на выходную величину базируется на методе преобразованной схемы. Изучение многих примеров привело к общему выводу: результат действия векторной погрешности на выходную величину определяют проектированием вектора на нормаль к поверхностям в точке касания элементов кинематических пар.
Пример 1. В передаче от кулачка к толкателю (рис. 142, а) входная величина —угол поворота кулачка, выходная величина — координата, определяющая положение толкателя на оси . MN — нормаль к поверхностям кулачка и толкателя в точке их касания. Заданы: эксцентриситет  и угол
и угол  , определяющий направление вектора эксцентриситета в начальном положении. Следуя приведенному выше правилу, находим,
, определяющий направление вектора эксцентриситета в начальном положении. Следуя приведенному выше правилу, находим,  — погрешность положения толкателя в зависимости от эксцентриситета кулачка как проекцию на направление нормали NN:
— погрешность положения толкателя в зависимости от эксцентриситета кулачка как проекцию на направление нормали NN:
 .
.
Преобразованный механизм (рис. 142, б) и план малых перемещений для него (рис. 142, в) согласуются с указанным правилом определения результата действия векторной погрешности.
Пример 2. В передаче от кулачка к рычагу (рис.143) входна<

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!