Матрицы. Сложение матриц и умножение на число.Их свойства.
Пусть m,n - целые положительные числа и M - непустое множество элементов любой природы. Матрицей размеров m*n над М или m*n –матрицей над M называется прям.таблица,составленная из mn элементов множества М и содержащая m строк и n столбцов.
Пусть A=(аi,j)m*n и B=(bi,j)m*n две матрицы одинаковой размерности, сумма матриц A и B, называется матрица такой же размерности, у которой каждый элемент равен сумме элементов A и B.
Произведение матрицы A=(аi,j)m*n на число С (С? R),называется m*n – матрица такой же размерности, у которой каждый элемент равен произведению соотв. элемента матрицы A на число С.
1. A+B=B+A(коммунативность сложения)
2. (A+B)+C=A+(B+C)(ассоциативность)
3. A+0=A
4. A+(-A)=0
5. α(A+B)=αA+αB
6. (α+β)A=αA+βB
7. (αβ)A=α(βA)
8. 1*A=A
Умножение матриц, его свойства.
Пусть даны матрица A=(аi,j)m*nи B=(bi,j)n*r, у кот.число элементов в строке первой матрицы равно числу элементов в столбце второй матрицы.
Произведением матрицы А на матрицу В наз. матрица С (С=А*В=АВ) размерности m*r, у кот. каждый эл-т равен сумме произведений эл-ов соответствующих строки и столбца матриц А и В.
Свойства:
1)АВ≠ВА-умножение матриц некоммутатитвно;
2)(АВ)*С=А*(ВС)-умножение матриц ассоциативно;
3)А*(В+С)=АВ+АС
(В+С)*А=ВА+СА-умножение матриц дистрибутивно по отношению к сложению;
4)α(АВ)=(αА)В=А(αВ);
Системы ур-ний. Матричная запись системы ур-ний.Связь между решение матричногоур-ния и решением системы.
Системы линейных однородных уравнений
Уравнение называется линейным, если оно содержит неизвестные в первой степени. Так, например,  есть линейное уравнение с одним неизвестным;
есть линейное уравнение с одним неизвестным;  - линейное уравнение с двумя неизвестными.
- линейное уравнение с двумя неизвестными.
Если в исходной системе все свободные члены равны нулю, то система называется однородный. Такая система всегда совместна, так как она имеет нулевое решение:  .
.
Система называется совместной, если она имеет хотя бы одно решение:  , и несовместной, если она не имеет ни одного решения. Если система совместна и имеет единственное решение, то она называется определенной; если же решений бесконечно много, то система называется неопределенной. При работе с системой принципиальным является вопрос о ее совместности. Пусть доказано, что система совместна. Возможны следующие случаи:
, и несовместной, если она не имеет ни одного решения. Если система совместна и имеет единственное решение, то она называется определенной; если же решений бесконечно много, то система называется неопределенной. При работе с системой принципиальным является вопрос о ее совместности. Пусть доказано, что система совместна. Возможны следующие случаи:
а) если система совместна, то есть  и число неизвестных равно рангу матриц А и В
и число неизвестных равно рангу матриц А и В  , то она имеет единственное решение;
, то она имеет единственное решение;
б) если же система совместна, но  , то она имеет бесконечно много решений.
, то она имеет бесконечно много решений.
Теорема Кронекера-Капелли: Для совместности системы линейных уравнений необходимо и достаточно, что бы ранг матрицы системы был равен рангу расширенной матрицы.
ФормулыКрамера.
Рассмотрим частный случай системы (4), когда число уравнений совпадает с числом неизвестных. Пусть для определенности  , то есть система имеет вид
, то есть система имеет вид
 .
.
Определитель  называется основным определителем данной системы. Следующие три определителя называются вспомогательными:
называется основным определителем данной системы. Следующие три определителя называются вспомогательными:
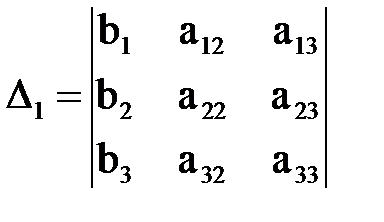 ,
, 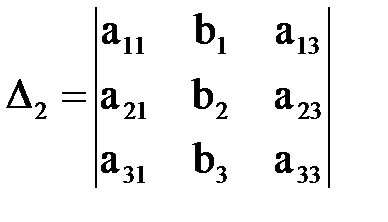 ,
, 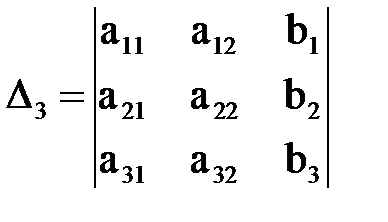 .
.
Теорема Крамера:Если определитель матрицы А  то система имеет единственное решение определяющееся формулами:
то система имеет единственное решение определяющееся формулами:  .
.
Доказательство:
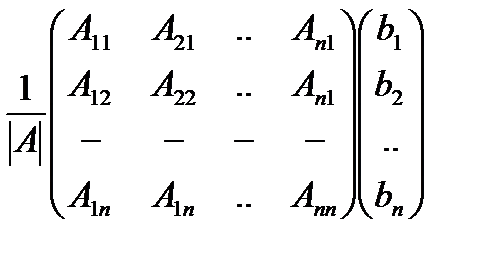
АХ=B.не трудно показать что матрица Х=  является решением данного уравнения (
является решением данного уравнения ( существует т.к.определитель матрицы А
существует т.к.определитель матрицы А  ).Действительно А()=В; ( А)В=В; ЕВ=В; В=В.Верно.Покажем, что данное математическое уравнение имеет единственное решение.Пусть
).Действительно А()=В; ( А)В=В; ЕВ=В; В=В.Верно.Покажем, что данное математическое уравнение имеет единственное решение.Пусть  решение данного уравнения, тогда
решение данного уравнения, тогда 
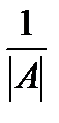
АХ=В определяется формулой Х= В. То есть  =
=  ==
== 
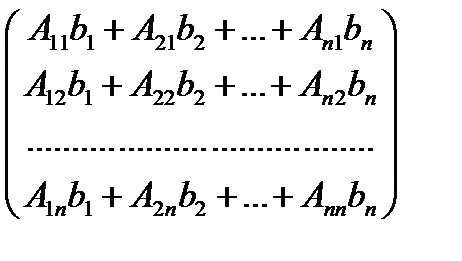
Заметим что определитель матрицы А(1);
А(1)= 
А(2)= 
- - - - - - - - - - - -- - - - - - - -
А(3)= 
Алгебраические дополнения последних формулах составлены к матрицам отличных от А, но при их нахождении столбик свободных членов вычеркивается, поэтому они совпадают с соответств. алгебраич. дополнением матрицы А.Таким образом: 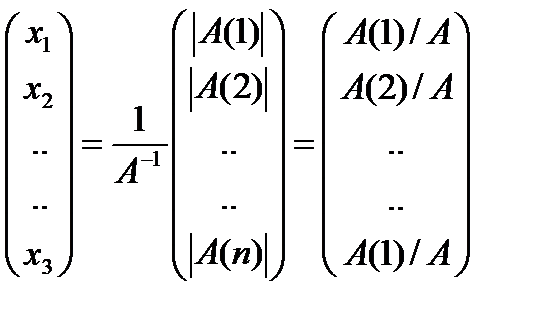
Замечание: При доказательстве теоремы 5 мы получили попутно способ решения систем с помощью обратной матрицы, его удобно применять если обратная матрица, матрица систем известна.
Метод Гаусса
Метод Гаусса –решение СЛУ в последовательном исключении неизвестных.
Замечание1-при решениисист. Методом Гауса работают только со строками расширенной матрицы.
Существует общий метод решения системы из  уравнений с
уравнений с  неизвестными, который называется методом последовательного исключения неизвестных или методом Гаусса. Последовательное исключение неизвестных проще и короче проводить с помощью элементарных преобразований расширенной матрицы данной системы. К ним относятся:
неизвестными, который называется методом последовательного исключения неизвестных или методом Гаусса. Последовательное исключение неизвестных проще и короче проводить с помощью элементарных преобразований расширенной матрицы данной системы. К ним относятся:
а) перестановка местами каких-либо строк матрицы;
б) умножение или деление (сокращение) какой-либо строки матрицы на число, отличное от нуля;
в) умножение какой-либо строки матрицы на число  и прибавление к другой строке.
и прибавление к другой строке.
Очевидно, что элементарные преобразования не изменяют ранга расширенной матрицы, другими словами, не нарушают равносильности исходной системы. После ряда таких преобразований исходная матрица будет приведена к одному из следующих видов:
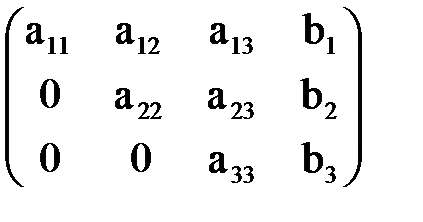 или
или 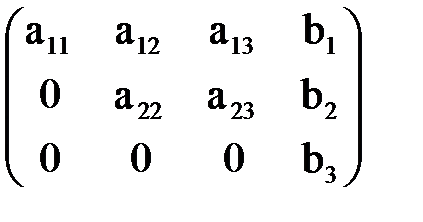 .
.
В первом случае система имеет единственное решение, во втором – либо бесконечно много решений, если  , либо не имеет решений, если
, либо не имеет решений, если  .
.
Векторное пространство. Примеры.
Мн-во М наз. векторным (линейным) пространством, а его эл-ты векторами, если:
I. Задан закон (операция сложения) по кот. кажд. паре векторов  ,
,  ?M сопоставляется единственный вектор из М, наз. их суммой и обозн. + ;
?M сопоставляется единственный вектор из М, наз. их суммой и обозн. + ;
II. Задан закон (операция умножения на число) по кот. каждому вектору  ? М и числу α? R ставится в соответствие единственный вектор, наз. произведение вектора на число и обознач.
? М и числу α? R ставится в соответствие единственный вектор, наз. произведение вектора на число и обознач.  .
.
III. Для любых векторов ,  , ?M и любых α, β? М справедливы след. равенства:
, ?M и любых α, β? М справедливы след. равенства:
1)  +
+  =
=  + ;
+ ;
2) ( + )+  =
=  +( + );
+( + );
3) Существует такой элемент  М, что
М, что  +
+  = + = ;
= + = ;
4) Существует эл-т –х? М, что – + = +(- )= ;
5) (  +
+  ) =
) =  +
+  ;
;
6) ( + )=  +
+  ;
;
7) (αβ) =α(β );
8) 1* 
– наз. нулевым, а вектор – – противоположным 
Пример1. Множество всех m*n матриц, по отношению к операциям сложения матриц и умножения матриц на число явл. векторным пространством.
Пример2. Множество всех векторов на плоскости (в пространстве) с обычными операциями сложения векторов и умножения вектора на число явл. векторным пространством.
Прямая на плоскости.
Определение. Любая прямая на плоскости может быть задана уравнением первого порядка
Ах + Ву + С = 0 или А(х-х0)+ В(у-у0)=0
причем постоянные А, В не равны нулю одновременно, т.е. А2 + В2¹ 0. Это уравнение первого порядка называют общим уравнением прямой.
Заметим, что ненулевой вектор параллельной прямой наз. направляющим.
Вектор, перпендикулярный прямой наз. нормальным вектором прямой.
Пусть М (х0;у0)? l, тогда  ǁ
ǁ  => (х-х0; у-у0) ǁ (m;n) =>
=> (х-х0; у-у0) ǁ (m;n) =>
 – каноническое уравнение прямой;
– каноническое уравнение прямой;
 – уравнение прямой, проход.через 2 точки;
– уравнение прямой, проход.через 2 точки;
d  – расстояние от точки до прямой;
– расстояние от точки до прямой;
у= kx+b – уравнение прямой по угловому коэффиценту;
 – уравнение прямой в отрезках по осям;
– уравнение прямой в отрезках по осям;
Взаимное расположение прямых на плоскости:
l1: A1x+B1y+C1=0
l2:A2x+B2y+C2=0
l1ǁ l2:A1:A2=B1:B2 ,k1=k2,  ǁ
ǁ  , l1 ┴ l2:
, l1 ┴ l2:
A1A2+B1B2=0, k1= -  ,
,
 (
( 
Плоскость в пространстве.
1. Общее уравнение плоскости: Ax+By+Cz+D=0 (  ).
).
Вектор перпендикулярный данной плоскостиназ. нормальным вектором этой плоскости. В частности, вектор  - нормальный вектор данной плоскости.
- нормальный вектор данной плоскости.
Частные случаи: а) если D=0, то Ax+By+Cz=0. Она проходит через начало координат; б) если А=0, то By+Cz+D=0, плоскость параллельна оси Ox; в) при В=0, то Ax+Cz+D=0параллельна Оy; г) при С=0, то п+By+D=0 параллельна оси Оz; е) если А=0, В=0 то Сz+D=0 параллельна плоскостиOxy, если А=0, С=0 то By+D=0 параллельна плоскостиOxz, если В=0 и С=0, то Ax+D=0 параллельна плоскостиОуz.
2. Уравнение плоскости, проход-ей через точку  перпенд-ую вектору n=(A,B,C) -
перпенд-ую вектору n=(A,B,C) - 
3. Уравнение плоскости в нормальном виде:  , где α,β,γ – углы между осямиOx,Oy,Oz и перпендикуляром, опущенным из начала координат на плоскость, р – длина этого перпендикуляра.
, где α,β,γ – углы между осямиOx,Oy,Oz и перпендикуляром, опущенным из начала координат на плоскость, р – длина этого перпендикуляра.
4. Уравнение плоскости в отрезках на оси:  , где a,b,c–величины отрезков,отсекаемых плоскостью на координатных осях.
, где a,b,c–величины отрезков,отсекаемых плоскостью на координатных осях.
5. Уравнение плоскости по трем точкам  :
:  (M(x,y,z) – произвольная точка плоскости)или в координатной форме:
(M(x,y,z) – произвольная точка плоскости)или в координатной форме:
Прямая в пространстве.
1) Каноническое уравнениепрямой, проходящей через точку  паралельно вектору
паралельно вектору  =(m;n;p):
=(m;n;p):

2) Параметрические уравнения прямой:
 где t–переменный параметр.
где t–переменный параметр.
3)две точки M1(x1, y1, z1) и M2(x2, y2, z2), тогда уравнение прямой, проходящей через эти точки:

4) Общее уравнениепрямой:

Направляющий вектор прямой находится по формуле:
 , или
, или 
Взаимное расположение двух прямых:
l2: 
l1: 
(.)M1(x1;y1;z1), (.)M2(x2;y2;z2)
 (m1;n1;p1)
(m1;n1;p1)  (m2;n2;p2) <φ
(m2;n2;p2) <φ


Цилиндрические поверхности.
Поверхности второго порядка – это поверхности, уравнения которых в прямоугольной системе координат являются уравнениями второго порядка.
1) - эллиптический цилиндр.
- эллиптический цилиндр.
2)  - гиперболический цилиндр.
- гиперболический цилиндр.
3) x2 = 2py – параболический цилиндр.
Производная
Пусть функция у=f(x) определена в некоторой окрестности точки х0, если переменная х получит приращение ∆х, то переменная у получит приращение ∆у=∆у(х0)= ∆f(х0)=f(х0+∆х)-f(х0)
Опр.1 Производной функции у=f(x) в т. х0 называется  =
= 
Производная функции f(x) в т. х обознач. у’=у’(x)=f’(x)= df/dx=dy/dx
При каждом конкретном значении х производная (если она сущ.) представляет собой некоторое число, таким образом конечному знач. х ставится в соотв. f’(x). Полученая функция как бы произведена от f(x). Этим объясняется понятие производной.
Операция нахождения производной назыв. дифференцированием.
Пусть кривая l является гр. функц. у=f(x) и точка М0(х0;f(x0))принадл. L. Рассмотрим некоторую секущую М0М

Угловой коэффициент секущей tgɸ=∆y/∆x, если т. М движ. По кривой в т. М0, то сек. М0М стемится к некоторому предельному положению наз.касательной, угловой коэф. Которой К=  =
=  =y’(x0).
=y’(x0).
Таким образом геометрич. смысл произв. следующий: производная ф. в т. х0 ровна угл. Коэф. Косательной и гр. функции у=f(x) в т. х0: y-f(x0)=f’(x0)(x-x0)
Cмеханич. Точки зрения произв. ф. представляет собой мгновенную скорость процесса. Например произв. пути по времени- скорость, произвскороти- ускорение.
Опр 2: Функция y=f(x) назыв. дифференцируемой в т. х0, если она имеет в т х0 конечную произв.
Функция назыв. Дифференцируемой, если она дифф. В каждой точке интервала.
Т1: Если функция f(x) диффер в т. х0 то она в этой точке непрерывна.
Док-во:  =
=  =
=  *
*  =f’(x0)*0
=f’(x0)*0
Замечание: Утверждение обратное т1 не имеет места. Например у=  непрерывна в т. х=0, но не фифференцируема или ф. у=
непрерывна в т. х=0, но не фифференцируема или ф. у=  непрерывна в т. х=0, но не дифф. В ней.
непрерывна в т. х=0, но не дифф. В ней.
Дифференциал функции
Под дифференциалом функции dy функцииy=f(x) понимается главная часть её приращения ∆у, пропорциональная приращению ∆х независимой х.
Дифференциал dx независимой переменной х равен её приращению dx=∆x.
Дифференциал любой дифференцируемой функции y=f(x) равен произведению её производной на дифференциал независимой переменной dy=f’(x)dx
Из формулы dy=f’(x)dxвытекает представление производ. в виде частного двух дифференциаловf‘(x)=dy/dx
Если ∆х достаточно мало по модулю, то с точностью до бесконечно малых более высокого порядка малости, чем ∆х, имеет место приближённое равенство ∆у≈dy или
f(x+∆x)≈f(x)+f’(x)*∆x
Соотношение f(x+∆x)≈f(x)+f’(x)*∆x используют в приближённых вычислениях.
Правило Лопиталя.
Если функции f(x) и g(x) дифференцируемы в вблизи точки а, непрерывны в точке а, g¢(x) отлична от нуля вблизи а и f(a) = g(a) = 0, то предел отношения функций при х®а равен пределу отношения их производных, если этот предел (конечный или бесконечный) существует.

Доказательство. Применив формулу Коши, получим:
где e - точка, находящаяся между а и х. Учитывая, что f(a) = g(a) = 0:

Пусть при х®а отношение  стремится к некоторому пределу. Т.к. точка e лежит между точками а и х, то при х®а получим e®а, а следовательно и отношение
стремится к некоторому пределу. Т.к. точка e лежит между точками а и х, то при х®а получим e®а, а следовательно и отношение  стремится к тому же пределу. Таким образом, можно записать:
стремится к тому же пределу. Таким образом, можно записать:
.
Теорема доказана.
Неопределенности вида  можно раскрыть с помощью логарифмирования. Такие неопределенности встречаются при нахождении пределов функций вида
можно раскрыть с помощью логарифмирования. Такие неопределенности встречаются при нахождении пределов функций вида  , f(x)>0 вблизи точки а при х®а. Для нахождения предела такой функции достаточно найти предел функции lny = g(x)lnf(x).
, f(x)>0 вблизи точки а при х®а. Для нахождения предела такой функции достаточно найти предел функции lny = g(x)lnf(x).
Асимптоты
Асимптотой кривой называется прямая, к которой неограниченно приближается точка кривой при неограниченном удалении её от начала координат.
Различают вертикальные и наклонные асимптоты.
Прямая X=a является вертикальной асимптотой графики функции y=f(x), если, по крайней мере, один из односторонних пределов в точке.x=a равен бесконечности т.е.
 или
или 
Прямаяy=k1x+b1 является наклонной асимптотой при x->+∞ если существуют оба предела
 и b1=
и b1= 
Аналогично, если существуют пределы
K1=  и b1=
и b1= 
То прямаяy=k2x+b2 является наклонной асимптотой приx->-∞
Если k=0 и существует  , то получаем горизонтальную асимптоту y=bкак частный случай наклонной.
, то получаем горизонтальную асимптоту y=bкак частный случай наклонной.
Если вертикальных асимптот может быть любое число, то наклонных асимптот не может быть более 2-ух.
Частные производные.
Определение. Пусть в некоторой области задана функция z = f(x, y). Возьмем произвольную точку М(х, у) и зададим приращение Dх к переменной х. Тогда величина Dxz = f(x + Dx, y) – f(x, y) называется частным приращением функции по х.
Можно записать
. 
Тогда  называется частной производной функции z = f(x, y) по х.
называется частной производной функции z = f(x, y) по х.
Обозначение: 
Аналогично определяется частная производная функции по у.

Геометрическим смыслом частной производной (допустим  ) является тангенс угла наклона касательной, проведенной в точке N0(x0, y0, z0) к сечению поверхности плоскостью у = у0.
) является тангенс угла наклона касательной, проведенной в точке N0(x0, y0, z0) к сечению поверхности плоскостью у = у0.
Опредетели n-ого порядка.
Определители n-го порядка .
4.Обратная матрица.Критерии её сущ-ния.
Обратная матрица.
5.Ранг матрицы.Элементарные преобразования матриц.Нахождения ранга с их помощью
Ранг матрицы.
Теорема Крамера.
Прямая на плоскости.
Плоскость в пространстве.
Прямая в пространстве.
Комплексные числа.
Производная
Дифференциал функции
Правило Лопиталя.
Асимптоты
Частные производные.
Матрицы. Сложение матриц и умножение на число.Их свойства.
Пусть m,n - целые положительные числа и M - непустое множество элементов любой природы. Матрицей размеров m*n над М или m*n –матрицей над M называется прям.таблица,составленная из mn элементов множества М и содержащая m строк и n столбцов.
Пусть A=(аi,j)m*n и B=(bi,j)m*n две матрицы одинаковой размерности, сумма матриц A и B, называется матрица такой же размерности, у которой каждый элемент равен сумме элементов A и B.
Произведение матрицы A=(аi,j)m*n на число С (С? R),называется m*n – матрица такой же размерности, у которой каждый элемент равен произведению соотв. элемента матрицы A на число С.
1. A+B=B+A(коммунативность сложения)
2. (A+B)+C=A+(B+C)(ассоциативность)
3. A+0=A
4. A+(-A)=0
5. α(A+B)=αA+αB
6. (α+β)A=αA+βB
7. (αβ)A=α(βA)
8. 1*A=A





