

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Интересное:
Аура как энергетическое поле: многослойную ауру человека можно представить себе подобным...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
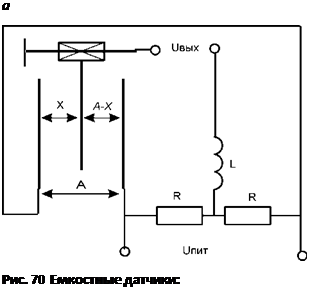
Емкостные датчики представляют собой плоский или цилиндрический конденсатор, одна из обкладок которого испытывает измеряемое перемещение, вызывая изменение емкости. Они замечательны своей простотой, что позволяет создавать прочные и надежные конструкции.
Диэлектриком обычно служит воздух, так что параметры конденсатора зависят только от геометрических характеристик и не зависят от свойств
используемых материалов. Если материалы правильно подобраны, то можно сделать пренебрежимо малым влияние температуры на изменения площади поверхности и расстояния между обкладками. С другой стороны, необходимо защищать датчик от тех факторов окружающей среды, которые могут ухудшить изоляцию между обкладками: от пыли, влажности, коррозии, ионизирующей радиации.
Для питания емкостных датчиков перемещений используется переменное биполярное напряжение высокой частоты. Чем выше частота, тем меньше размеры чувствительного элемента — конденсатора с переменными параметрами.
Емкостные датчики перемещений выпускаются в виде типовых комплектующих или встраивают в МУ, объединяя детали датчика и элементы МУ.
В настоящее время выпускаются типовые емкостные датчики малых линейных перемещений, охватывающих диапазон измерений от десятков микрон до десятков миллиметров. Конструктивно линейные датчики представляют собой цилиндрический конденсатор с одной из обкладок, перемещающейся вдоль оси, выполненный как цилиндр с ходовым поршнем (рис. 69). Датчики угла выполняют в виде лепестков, перекрывающих друг друга при вращении.
Параметры выбора типовых емкостных датчиков: диапазон измерения, мм, рад; основная погрешность относительная, ±%; диапазон рабочих температур, °С; дополнительная температурная погрешность нуля и шкалы, ±%/°С; полоса пропускания, Гц; минимальная и максимальная длина датчика в рабочем положении, мм; вес подвижной части датчика, кг; ОТП.
Схемные и компоновочные решения емкостных датчиков могут иметь самые разные решения, одно из которых представлено на рис. 70.
Достоинства емкостных датчиков: большая мощность и уровень напряжения выходного сигнала, независимость от температуры и радиации.
Недостатки емкостных датчиков: существенная нелинейность, малые диапазоны измерений, питание переменным током, зависимость от паразитных емкостей монтажа, большие размеры чувствительных элементов, необходимость в индуктивном реакторе.
Выходом датчика является амплитудно-модулированный сигнал, который необходимо детектировать и через АЦП вводить в процессор.

Конструкции типовых емкостных датчиков: а — линейного; б — углового.


 а — пример схемы применения и включения; б — линейный датчик; в — датчик вращения.
а — пример схемы применения и включения; б — линейный датчик; в — датчик вращения.
Несмотря на существенные недостатки, в мехатронике встречаются случаи безальтернативности для емкостных датчиков. Расчет емкостного датчика лучше рассмотреть на примерах, приведенных в CD-
Датчики наклона
Датчики наклона, в отличие от датчиков углового положения, измеряют отклонение в системе координат, связанной с землей, а точнее, с гравитационным полем земли. К таким датчикам относятся прежде всего гироскопические датчики и жидкостные инклинометры.
Гироскопические датчики.
Гироскопический датчик угловых перемещений использует свойство гироскопа с тремя степенями свободы сохранять неизменным положение оси собственного вращения в пространстве. Гироскоп определяет углы отклонения в системе координат, связанной с гравитационным полем.
В технике измерения перемещений и скоростей перемещений применяются следующие типы гироскопических датчиков.
1. Электромеханические.
2. Оптические (лазерные).
3. Волоконно-оптические.
4. Волновые твердотельные.
5. Квантовые.
6. Пьезокерамические (пьезоэлектрические).
6.1. В форме трехгранной призмы.
6.2. Биморфные.
Электромеханический гироскоп — это прибор, основным элементом которого является быстро вращающийся ротор, закрепленный так, что ось его вращения может поворачиваться. Три степени свободы (оси возможного вращения) ротора гироскопа обеспечиваются двумя рамками карданова подвеса (карданного подвеса, кардана).

Рис. Гироскоп в кардановом подвесе
1 - ротор гироскопа; 2 - внутренняя рамка карданова подвеса; 3 - наружная рамка карданова подвеса; 4 - подставка; wе вектор переносной угловой скорости; Wz-собственная угловая скорость вращения ротора гироскопа

Рис. Трёхстепенной гироскоп
Если на такое устройство не действуют внешние возмущения, то ось собственного вращения ротора сохраняет постоянное направление в пространстве. Если же на него действует момент внешней силы, стремящийся повернуть ось собственного вращения, то она начинает вращаться не вокруг направления момента, а вокруг оси, перпендикулярной ему (эффект прецессии). В хорошо сбалансированном (астатическом) и достаточно быстро вращающемся гироскопе, установленном на высокосовершенных подшипниках с незначительным трением, момент внешних сил практически отсутствует, так что гироскоп долго сохраняет почти неизменной свою ориентацию в пространстве. Поэтому он может указывать угол поворота основания. Если же поворот оси гироскопа ограничить пружиной, то при соответствующей установке его, скажем, на подвижной платформе, выполняющей разворот, гироскоп будет деформировать пружину, пока не уравновесится момент внешней силы.
Параметры выбора электромеханических гироскопов: количество измеряемых переменных; погрешность измерения, рад; время готовности, мин; крутизна статической характеристики, мВ/град; тип выходного сигнала (аналоговый, цифровой); выходное напряжение, В; выходное сопротивление, Ом; род тока питания (переменный с числом фаз и частотой, постоянный); напряжение питания, В; ресурс, ч; ОТП.
Компоновка и крепление электромеханических гироскопов выполняется по рекомендациям поставщика. Способ ввода сигнала в контроллер определяется типом считывающего устройства механического гироскопа. Электромеханические гироскопы имеют свою конкурентную нишу в технике летательных аппаратов и в судостроении, но в других областях техники они постепенно вытесняются иными типами гироскопов, прежде всего, пьезокерамическими.
Пьезокерамические (вибрационные)гироскопы.
В большинстве пьезокерамических гироскопов используется вибрация пьезокерамических пластин, призм и тел другой формы. Поворачиваясь вокруг оси, такое тело начинает отклоняться в плоскости, поперечной плоскости вибрации, под действием кориолисовых сил. Измеренное отклонение служит мерой угла поворота.
Достоинства пьезокерамических гироскопов: компактность, малый вес, высокая скорость отклика, высокая точность, хорошее соотношение «сигнал/шум», высокий уровень выходного сигнала, хорошая линейность преобразования, высокая вибро- и удароустойчивость, низкое напряжение питания и малый ток, возможность поверхностного монтажа на печатной плате, низкая стоимость.
Недостатки пьезокерамических гироскопов: температурная нестабильность, неустойчивость к радиоактивным излучениям, потребность в интегрировании сигнала скорости.
Параметры выбора пьезокерамических гироскопов: количество осей измерения угла (степеней подвижности, каналов измерения); относительный коэффициент влияния каналов, %; диапазон измеряемых отклонений, град; полоса пропускания, Гц; выходной шум, дБ; стабильность смещения, град/с; напряжение питания, В; максимальный потребляемый ток, мА; максимальная угловая скорость, рад/с; разрешающая способность, град/с; дрейф нуля, град/с; чувствительность, мВград/с; резонансная частота, кГц; диапазон выходных напряжений, В; коэффициент преобразования, мВ с/град; температурный коэффициент, %; линейность, %; скорость отклика, Гц; емкость выходная, нФ; сопротивление выходное, Ом; диапазон рабочих температур, °С; ОТП.
Подключение пьезокерамических гироскопов к цифровому контроллеру осуществляется через АЦП. Для некоторых моделей гироскопов требуется усилитель сигнала и фильтр низких частот. Некоторые марки микросхем имеют цифровой выход в последовательных или параллельных кодах.
Примеры расчета датчика угла поворота на базе микросхем пьезокерамических гироскопов приведены в CD-приложении.
Этот принцип действия заложен в МЭМС датчиках. (рассмотрим на практич. занятиях)
О п тические гироскопы
Делятся на лазерные (активные оптические) гироскопы, пассивные оптические гироскопы, волоконно-оптические и интегрально-оптические (ВОГи ИОГ). Принцип действия основан на эффекте Саньяка, открытом в 1913 году[14][15]. Теоретически он объясняется с помощью СТО. Согласно СТО скорость света постоянна в любой инерциальной системе отсчёта[16]. В то время как в неинерциальной системе она может отличаться от c[17]. При посылке луча света в направлении вращения прибора и против направления вращения разница во времени прихода лучей (определяемая интерферометром) позволяет найти разницу оптических путей лучей в инерциальной системе отсчёта, и, следовательно, величину углового поворота прибора за время прохождения луча. Величина эффекта прямо пропорциональна угловой скорости вращения интерферометра и площади, охватываемой путём распространения световых волн в интерферометре.
Л азерный гироскоп
Регистрирующее устройство преобразует интенсивность света в электрический сигнал. Для измерения угла поворота подсчитывают число периодов сигнала, а для измерения угловой скорости достаточно определить его частоту. Лазерный гироскоп обладает угловым разрешением, недоступным механическим гироскопам. Так, если оптический резонатор имеет форму треугольника со стороной около 12 см, то каждому периоду синусоиды выходного сигнала соответствует поворот на одну угловую секунду. Показания лазерного гироскопа не зависят от линейных и угловых ускорений, выходной сигнал легко обрабатывается компьютерами, которые все шире используются в навигационных системах. С одинаковым изяществом такой гироскоп может измерять угловые скорости от тысяч оборотов в секунду до скоростей в сотни миллиардов раз меньших, до 0,01 градуса в час. Это очень мало: один оборот с такой скоростью занимает более четырех лет; часовая стрелка движется в 3.000 раз быстрее. Такая точность измерения соответствует точности прилунения в десять километров. Включение лазерного гироскопа занимает тысячные доли секунды. Принципиальный предел его точности, по некоторым оценкам, равен одной миллионной градуса в час. Это один оборот за 40 000 лет! Лазерный гироскоп измеряет угловые перемещения только вокруг одной оси. Но можно создать блок из трех лазерных гироскопов, оси, чувствительности которых взаимно перпендикулярны. Такой прибор позволяет получить полную информацию об угловом положении, например, космического корабля в пространстве

Устройство лазерного гироскопа..
Лазерный гироскоп (фотонный гироскоп) - квантовый гироскоп, чувствительным элементом которого является кольцевой лазер, генерирующий 2 встречные волны. Действие Л. г. основано на зависимости разности собственных частот кольцевого оптического резонатора для встречных волн от скорости его вращения относительно инерциальной системы отсчёта. В отличие от волоконно-оптического гироскопа, регистрирующего угл. скорость вращения, Л. г. позволяет определять изменение угла поворота.
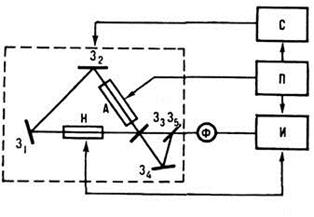
Рис. 1. Принципиальная схема лазерного гироскопа: Зt-З3 - зеркала; А - активная среда; З4, З5 - зеркала смесителя встречзых волн (З6 - полупрозрачное); Н- невзаимный элемент; Ф - фотодетектор; П - блок питания; С - система стабилизации параметров лазера; И - система обработки информации.
Резонатор кольцевого лазера состоит из 3 (или 4) отражателей (зеркал или призм), установленных на Жёстком основании и обеспечивающих замкнутую траекторию (треугольник или прямоугольник) для встречных волн (рис. 1). Возникновение разности частот встречных волн следует из зависимости времени обхода светом вращающегося контура от скорости вращения и направления обхода. Согласно общей теории относительности, разность времён обхода вращающегося контура  (в приближении малости линейной скорости вращения по сравнению со скоростью света с) записывается в виде, который может быть интерпретирован и в рамках классич. кинематики:
(в приближении малости линейной скорости вращения по сравнению со скоростью света с) записывается в виде, который может быть интерпретирован и в рамках классич. кинематики:

Электронные гироскопы — преобразователи наклона и угловой скорости в электрический ток. Так же как и механические (ротационные), пьезокерамические электронные гироскопы служат для контроля положения и угловых скоростей с малым временем отклика (до 50 Гц). Электронные датчики предназначены для работы в качестве датчиков изменения наклона, а также компенсации дрожания руки (штатива) в видеокамерах и высокотехнологичных фотоаппаратах.
Электронные гироскопы выпускаются также и в ЧИП-исполнении, что позволяет использовать их для поверхностного монтажа.
На основе такого электронного датчика создано простое устройство, которое посредством светоизлучающего светодиода сигнализирует об изменении своего, ориентированного на горизонтальную поверхность положения.
Пользоваться датчиком просто — достаточно установить его на контролируемой поверхности (если предполагается контроль наклона и стабилизации) или поместить в другую (нежидкую!) контролируемую среду для контроля вибрации.
Инклинометр
Инклиометр (датчик угла наклона) предназначен для двухдименсионального (двухосевого) высокоточного измерения угла наклона. Применение цифрового интерфейса позволяет передавать точные значения угла наклона, производить удаленное конфигурирование, делать предустановки с выдачей управляющего сигнала на исполнительное устройство. Измерительный цикл 10 Гц, установка показаний не более 0,5 с.
Жидкостные инклинометры. Малогабаритные жидкостные инклинометры с электрическим выходным сигналом, пропорциональным углу наклона датчика, обладают рядом достоинств. Высокая точность, миниатюрные размеры, отсутствие подвижных механических узлов, простота крепления на объекте и низкая стоимость делают целесообразным использование инклинометров не только в качестве датчиков крена, но и как альтернативу датчикам малых угловых перемещений. Недостаток таких инклинометров — большая инерционность (постоянная времени 0,1...0,4 с), полоса частот до 3 Гц.
Инклинометр (рис.) представляет собой дифференциальный емкостный преобразователь наклона, включающий в себя чувствительный элемент в форме капсулы. Капсула состоит из подложки с двумя планарными электродами, покрытыми изолирующим слоем и герметично закрепленными на подложке корпусом. Внутренняя полость корпуса частично заполнена проводящей жидкостью, которая является общим электродом чувствительного элемента. Общий электрод образует с Схема инклинометра планарными электродами дифференци  альный конденсатор. Выходной сигнал датчика пропорционален величине емкости дифференциального конденсатора, которая линейно зависит от положения корпуса в вертикальной плоскости.
альный конденсатор. Выходной сигнал датчика пропорционален величине емкости дифференциального конденсатора, которая линейно зависит от положения корпуса в вертикальной плоскости.
Инклинометр проектируют так, чтобы он имел линейную зависимость выходного сигнала от угла наклона в одной (рабочей) плоскости и практически не изменял показания в другой (нерабочей) плоскости. Для определения положения плоскости в пространстве используется два расположенных под углом 90° друг к другу инклинометра.
Параметры выбора инклинометров: полный диапазон, град; линейный диапазон, град; порог чувствительности, град; линейность, ±%; повторяемость «Нуля», град; диапазон рабочих температур, °С; погрешность при поперечном наклоне до 45°, град; постоянная времени прибора, с; полоса пропускания, Гц; температурный коэффициент «Нуля», %/°С; температурный коэффициент наклона характеристики, %/°С; длительная стабильность, %; уровень пульсации выходного сигнала, %; напряжение питания, В; потребляемая мощность, Вт; тип выходного сигнала (аналоговый, цифровой); напряжение выходного сигнала, В; выходное сопротивление, Ом; способ крепления; ОТП.
Области применения: определение положения высотных сооружений, плотин, стволов шахт, платформ, определение величины прогибов и деформаций опор и балок мостовых и туннельных конструкций, контроль углов наклона автомобильных и железных дорог.

Рис. 8. Инклинометр
Пример выпускаемых отечественным предприятием «Горизонт» датчиков наклона:
| Измеритель угла наклона (датчик угла наклона) двухкоординатный ИН-Д3 |
 Во время работы измеритель выдает два выходных сигнала относительно “нулевой точки”, характеризующих составляющие угла наклона измерителя на две взаимоперепендикулярные горизонтальные оси. Во время работы измеритель выдает два выходных сигнала относительно “нулевой точки”, характеризующих составляющие угла наклона измерителя на две взаимоперепендикулярные горизонтальные оси.
|
Изделия выпускаются с цифровыми и аналоговыми выходами на 5 диапазонов: ±360, ±720, ±1800, ±3600, ±7200 угловых секунд и предназначены для измерения:
|
Областями применения ИН-Д3 являются:
|
| ИН-Д3 относятся к приборам, которые имеют альтернативные названия: наклономеры, инклиномеры, датчики угла наклона, inclinometers, tiltmeters, tilt sensors, tilt meters, clinometers
|
Датчики скорости
Необходимы для измерения угловых и линейых скоростей как в метрологических целях, так и для построения замкутух систем стабихизации и наведения систем, размещенных на качающемся основании (носителе)
|
|
|

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

