Информационные устройства и системы
(мехатронных и робототехнических систем)
Автор-составитель: доцент, к.т.н., Коротков Е.Б.
ebkorotkov@yandex.ru

9.Датчики скорости
Классификация
Тахогенераторы переменного тока (асинхронные)
Тахогенераторы постоянного тока
Гироскопические датчики скорости
10. Датчики динамических величин
Ускорения (акселерометры)
силомоментные датчики и датчики давления
11. Датчики тока и температуры.
Часть 2. Сенсорные устройства МиРС.
12. Понятие о локационных системах.
Общие сведения о ЛС. Модуляция и детектирование сигналов.
Электромагнитные ЛС.
Магнитные и вихретоковые ЭЛС.
ЭЛС специального назначения.
Акустические ЛС.
Датчики и системы АЛС.
Специальные АЛ системы.
Оптические ЛС.
Основы оптической локации.
Элементы и системы ОЛ.
Лазерные локаторы.
Основы технического зрения.
Датчики изображения.
Хранение изображений в СТЗ.
Кодирование и обработка изображений,
Тактильные датчики.
Принципы силомоментного очувствления роботов.
Датчики силомоментного очувствления роботов.
Тактильные датчики.
Перечень литературы.
1. Воротников С.А., Информационные устройства робототехнических систем: Учеб. Пособие.- М.: изд-во МГТУ им.Н.Э. Баумана, 2005.
2. Кончаловский В.Ю. Цифровые измерительные устройства: Учебное пособие для ВУЗов.- М.: Энергоатомиздат,1985.
3. Лукинов А. П. Проектирование мехатронных и робототехнических устройств: Учебное пособие. — СПб.: Издательство «Лань», 2012. — 608 с.: ил. (+ CD) — (Учебники для вузов. Специальная литература).
Лекция 1.
1. Основные понятия и определения
1. Мехатроника
Термин «мехатроника» появился он примерно в 80-х годах XX в. как развитие понятия «электромеханика». Мехатроника предполагает непосредственное внедрение микроэлектронных систем в систему управления, в некотором роде синтез электроники и механики.
В дальнейшем термин «мехатроника» был существенно обобщен, в результате чего к мехатронным системам стали относить практически любые сложные технические системы, содержащие механическую и электронную части и управляемые компьютером. В результате роботы также оказались мехатронными системами. Однако термин «мехатроника», конечно, шире. К этой области относятся также системы, которые не являются робототехническими, например: системы управления комплексами технологического оборудования, обрабатывающие центры, системы поддержания заданной температуры в помещении
Обобщенная функциональная схема мехатронного устройства.

Информация
Информация — это обозначение содержания, полученного от внешнего мира в процессе приспособления к нему (H. Винер).
Система поглощает информацию из внешней среды и использует ее для выбора правильного поведения. Информационные потоки начинают циркулировать по цепям управления. Прибором, передающим информацию в контур управления, является датчик, от характеристик которого в значительной степени зависит качество управления.
Адаптация
Пусть Si - некоторая активная система, взаимодействующую с внешней средой. Предположим, что эта система имеет априорную информацию I а о среде и в процессе функционирования получает текущую информацию Iр как о внешней среде, так и о собственном состоянии. Ее целью является принятие решений, связанных с преобразованием или анализом внешней среды.
Под адаптацией будем понимать способность активной системы достигать заданных целей в условиях неопределенности на основе использования текущей информации о собственном состоянии и состоянии среды.
При этом могут изменяться параметры системы, се структура и алгоритм функционирования.
Следовательно, адаптивная система - система, которая может приспосабливаться к изменению внутренних и внешних условий.
Простейшей адаптивная система - система с обратной связью (следящая система).
В настоящее время применительно к системам управления адаптацию часто рассматривают с двух позиций:
С одной стороны, когда системы управления имеют в своем составе сенсорные устройства, обеспечивающие получение информации Iр о состоянии среды или свойствах объектов, причем эти данные используются для решения задач, связанных с формированием управления системой.
С другой стороны, когда системы управления используют адаптивные алгоритмы, способные изменяться под воздействием текущей Iр или обучающей Iа информации от сенсоров.
В обоих случаях наличие сенсорной (информационной) системы (далее – ИС) является признаком адаптивной структуры.
Пример активной адаптивной системы - система управления адаптивного робота.

В состав ИС здесь входят подсистема восприятия окружающей среды и подсистема связи. Подсистема восприятия окружающей среды содержит датчики включающие первичные преобразователи (чувствительные элементы). Сигналы с датчиков поступают в блок обработки данных и далее в блок анализа рабочей сцены и находящихся на ней объектов. При этом используется априорная информация /а о рабочей сцене в виде математической модели, которая уточняется с помощью подсистемы связи. Полученная информация применяется для планирования движений на исполнительном, тактическом и стратегическом уровнях. Эти движения реализуются рабочим механизмом. Для робота это обычно манипулятор, снабженный соответствующим инструментом.
4. Основные термины, связанные с ИС
4.1. Датчик
Первичным преобразователем, или чувствительным элементом (ЧЭ), называется простейший элемент ИС, изменяющий свое состояние под действием внешнего возмущения. Пример: фотодиод или тензорезистор.
Датчик представляет собой устройство, которое под воздействием измеряемой физической величины выдает эквивалентный сигнал (обычно электрической природы — заряд, ток, напряжение или импеданс), являющийся однозначной функцией измеряемой величины. Простейший датчик состоит из одного или нескольких первичных преобразователей и измерительной цепи.
Классификация датчиков
По типу замещаемой сенсорной функции:
o Кинестетические
Кинестетические датчики формируют информационный массив данных об обобщенных координатах и силах, т. е. о положении и относительных перемещениях отдельных рабочих органов и развиваемых ими усилиях.
Пример: датчики положения, скорости, измерители сил и моментов в сочленениях многозвенного механизма.
o Локационные
Локационные датчики предназначены для определения и измерения физических параметров среды путем излучения и приема отраженных от объектов сигналов.
Пример: электромагнитные, в том числе оптические; акустические устройства.
o Визуальные
Визуальные датчики обеспечивают получение информации о геометрических и физических характеристиках внешней средына основе анализа ее освещенности в оптическом диапазоне, включая ИК, СВЧ и рентгеновское излучения.
Примером являются различные телевизионные системы.
o Тактильные
Тактильные датчики позволяют определить характер контакта с объектами внешней среды в целях их распознавания.
Пример: тактильные матрицы и силомоментные датчики.
Тактильные датчики относятся к датчикам контактного типа.
По радиусу действия:
o Контактные датчики,
Контактными являются также кинестетические датчики. Сенсорные устройства ближнего действия получают информацию о среде вблизи объекта работы, дальнего — во всей рабочей зоне.
Примерами являются визуальные и акустические преобразователи.
o Датчики ближнего действия
o Датчики дальнего действия
По способу преобразования:
o Генераторные (активные)
Генераторные датчики являются источником непосредственно выдаваемого электрического сигнала. Это — термоэлектрические преобразователи; устройства, в основе функционирования которых лежат пиро- и пьезоэлектрические эффекты, явление электромагнитной индукции, фотоэффект, эффект Холла и др.
o Параметрические (пассивные)
В параметрических датчиках под воздействием измеряемой величины меняются некоторые параметры выходного импеданса. Импеданс датчика обусловлен его геометрией и размером элементов, а также электромагнитными свойствами материала: удельным электросопротивлением  , относительной магнитной проницаемостью
, относительной магнитной проницаемостью  , относительной диэлектрической проницаемостью
, относительной диэлектрической проницаемостью  . В преобразователях этого типа сигнал формируется измерительной цепью (потенциометрической или мостовой схемой, колебательным контуром, операционным усилителем). Параметрическими преобразователями являются большинство датчиков силы, давления, перемещения.
. В преобразователях этого типа сигнал формируется измерительной цепью (потенциометрической или мостовой схемой, колебательным контуром, операционным усилителем). Параметрическими преобразователями являются большинство датчиков силы, давления, перемещения.
Несмотря на разнообразие датчиков, используемых в робототехнических и мехатронных системах, они должны быть унифицированы.
Унифицированным преобразователем (трансмиттером) является датчик, имеющий нормированный диапазон сигнала на выходе.
Согласно международному стандарту нормированные сигналы должны находиться в диапазонах:
· сила тока 0...± 5 мА или 0...± 20 мА;
· напряжение 0...± 1 В или 0...± 10 В.
Кроме того, к датчикам систем предъявляют следующие требования:
· высокая надежность и помехоустойчивость в условиях электромагнитных помех, колебаний напряжения и частоты;
· малогабаритность, простота конструкции, «размещаемость» на захватном устройстве и других частях манипулятора при ограниченной площади и объеме;
· развязка выходных и входных цепей, простота юстировки и обслуживания;
· возможность абсолютного отсчета параметров и др.
4.2. Информационная (информационно-сенсорная) система
Один или несколько датчиков в совокупности с усиливающими и преобразующими устройствами образуют информационную систему (рис. В2).

Информационная (информационно-сенсорная) система предназначена для интегральной оценки наблюдаемого процесса или явления в целях опредeления его состояния и формирования соответствующего сообщения.
В робототехнике информационные системы используются на трех уровнях управления: исполнительном, тактическом и стратегическом.
Примеры использования информационных систем в роботах
| Уровень управления
| Основные задачи, решаемые с помощью ИС
| Информационные средства
|
| Исполнительный
| Обеспечение монотонности движения захвата. Устранение взаимовлияния звеньев манипулятора. Обеспечение стабильности динамических характеристик приводов
| Датчики положения, скоростей, ускорений;одно-компонентные датчики измерения момента на валу
|
| Тактический
| Обеспечение необходимой силы захвата. Самонаведение и торможение вблизи неизвестных препятствий
| Тактильные матрицы и датчики проскальзывания; оптические, индуктивные и емкостные датчики; видеокамеры; ультразвуковые дальномеры
|
| Стратегический
| Нахождение маршрута движения в недетерминированной обстановке. Развитие необходимых усилий при работе со связанными объектами. Поиск и распознавание заданных объектов, определение их взаимного положения
| Разнообразные дальномеры, системы технического зрения и силомоментного очувствления
|
Пример информационной системы исполнительного уровня.(Система стабилизации)
Общие сведения
Роботы создавали с целью заменить человека в тех случаях, когда он по тем или иным причинам не может принять непосредственное участие в выполнении достаточно сложных операций. …возникли такие понятия, как восприятие информации роботом, принятие им решений, искусственный интеллект робота и т. п. – антропологический подход. В основе антропологического (бионического) подхода лежит принцип замещения или усиления некоторой сенсорной функции человека.
Из всего множества воздействующих на организм факторов окружающей среды лишь некоторые улавливаются сенсорными органами. Эти факторы называются сенсорными стимулами.
Восприятие внешнего мира человеком осуществляется через шесть основных каналов сенсорной рецепции, образующих распределенную информационную сеть. Это каналы органов чувств — слух, зрение, осязание, терморецепция, обоняние и вкус. В каждом из них возбуждениерегистрируется системой ЧЭ (рецеторов), специфических для разных сенсорных модальностей, и передается по каналу связи (нервному волокну) в виде потенциалов действий. Система рецепторов каждой модальности связана с определенными отделами центральной нервной системы. Вид каналов связи основных сенсорных модальностей показан на рис. ВЗ.
Распознавание сенсорного образа у человека является результатом совместной работы информационной системы и мозга.. При этом возможности рецепторов по передаче информации существенно превышают возможности ИС по ее переработке. Количество поступающей информации избыточно и должно быть сокращено благодаря предварительной обработке в процессе передачи от рецепторов к мозгу.
· Главная функция обработки информации на уровне рецепторов заключается в выделении определенных важных сторон и свойств поступающих извне сигналов и устранении избыточности. Важнейшей задачей здесь является выделение контраста стимула. Информация о стимуле, который все длится и длится, мозгу нужна существенно меньше. Например, в зрении основное значение имеет контурная информация. Так, экспериментально показано, что образ спящей кошки идентифицируется по 38-точечному контурному представлению.
Во всех типах рецепции действуют общие принципы интегрального описания стимулов, основанные на анализе их признаков.
Одним из основных принципов является использование нескольких типов ощущений для формирования всего их разнообразия.
Всю гамму вкусовых ощущений представляют в виде суперпозиции четырех основных вкусовых качеств: сладкое, соленое, кислое и горькое.
Примерно также обстоит дело и с обонянием. Человек способен распознать запах около сотни тысяч различных веществ, представления о запахах конкретны и связаны с каким-либо веществом (миндалем, камфарой и др.). В соответствии с господствующей в настоящее время стереохимической теорией обоняния Монкриффа — Эймура, выделяют семь первичных запахов: мускусный, камфарный, цветочный, эфирный, мятный, острый и гнилостный.
Из сравнительной количественной характеристики сенсорных функций человека (табл. ВЗ) (анализируются: число клеток, число отходящих нервных волокон, пропускная способность, чувствительность ), видно, что по пропускной способности выделяется зрение, играющее основную роль в адаптации человека к окружающей среде. В то же время слух и особенно осязание обладают значительно более высокой чувствительностью и используются для тонкой коррекции движений при взаимодействии с внешней средой.
Кинестетическая рецепция
Важнейшую роль в очувствлении робота играют кинестетические сенсоры. Кинестетическая функция служит для обеспечения согласованных движений опорно-двигательного аппарата человек а. Она реализуется нелокализованной системой рецепторов, в которой достаточно сложно выделить отдельные датчики параметров. С позиции бионики кинестетические рецепторы, содержащиеся в каждой мышце, являются информационными элементами исполнительного уровня управления (как бы датчиками соответствующих контуров регулирования). Они регистрируют изменения относительного положения отдельных элементов двигательной системы.
Кинестетическая функция, связанная с обеспечением надлежащей ориентации в пространстве всего организм а, реализуется вестибулярным аппаратом. В этом смысле он соответствует информационной системе тактического уровня управления. Его функционирование, как и работа собственно кинестетических сенсоров, осуществляется под управлением нервной системы.
Исполнительным механизмом организма является скелет, двигательная активность которого формируется посредством связок и суставов (кинематических пар), а также мышц (приводов).
В физиологии кинестетическую сенсорную функцию связывают с рецепторами трех подсистем: мышечной и сухожильной (они контролируют характеристики перемещения, скорости и усилия), кожной (связанной с измерением параметров давления и проскальзывания) и вестибулярным аппаратом.
Относя кожную подсистему к разделу тактильной рецепции, можно считать, что применительно к роботу кинестетическая функция описывается в терминах позы и движения. Чувство позы определяется углами между суставами, оно позволяет, например, синхронизировать движения обеих рук в тестах с завязанными глазами. Чувство движения связано с восприятием направления и скорости относительного перемещения суставов.
Важнейшую роль в кинестетической функции играют мышечные веретена, представляющие собой рецепторы растяжения.
Передача информации в кинестетической системе осуществляется путем частотно-импульсной модуляции: во время растяжения рецепторов частота импульсации увеличивается. При этом мышечные веретена возбуждаются главным образом при изменении длины мышцы, а сухожильные органы — при ее напряжении.
Следовательно, у каждой мышцы есть две системы обратной связи:
− регуляция длины с мышечными веретенами в качестве датчиков положения
− регуляция напряжения, датчиками в которой служат сухожильные органы
З. Слуховая рецепция
Для звукового восприятия характерно четыре измерения: объем, громкость, плотность и высота. Эти субъективные свойства звука определяются двумя физическими переменными сигнала: его амплитудой и частотой.
Слуховой аппарат животных и человека состоит из трех основных частей: наружного, среднего и внутреннего уха.
Зрительная рецепция
Визуальные анализаторные системы человека — это сложные многоуровневые образования, служащие для анализа оптических сигналов. То, что воспринимается зрением, есть результат взаимодействия сенсорных и двигательных механизмов глаза и центральной нервной системы. Мозг создает целостную картину из последовательности дискретных изображений.
Человек относится к числу так называемых фронтальных млекопитающих, у которых зрительные ноля (области, воспринимаемые каждой сетчаткой отдельно) перекрываются. Это позволяет человеку выполнять точные манипуляции руками под контролем зрения, а также обеспечивает точность и глубину видения (стереоскопическое, или бинокулярное зрение). Бинокулярное зрение характеризует возможность совмещения образов объекта, возникающих в каждой сетчатке. Зона перекрытия зрительных полей обоих глаз около 120°, в то время как зона монокулярного видения составляет около 30° для каждого глаза (именно такой угол зрения имеет глаз относительно его центральной точки).
Бинокулярное зрение у людей не является врожденным и формируется в возрасте 8—27 недель.
Рис 1.2 а
 Датчики второго порядка (например, пьезоэлектрические акселерометр ы) содержат в своей структуре колеблющиеся элементы и характеризуются собственной частотой ƒ0 и коэффициентом затухания ζ. Функция преобразования датчика представляет собой дифференциальное уравнение вида
Датчики второго порядка (например, пьезоэлектрические акселерометр ы) содержат в своей структуре колеблющиеся элементы и характеризуются собственной частотой ƒ0 и коэффициентом затухания ζ. Функция преобразования датчика представляет собой дифференциальное уравнение вида
а частотная характеристика определяется зависимостью

Частотн ы е хара к теристики датчика второго порядка представлен ы на рис. 1.2, 6


Рис 1.2 б
Частота среза – наименьшая или наибольшая частота внешних воздействий, которую датчик может воспринять без искажений. Верхняя частота среза показывает насколько быстро датчик реагирует на внешнее воздействие, а нижняя частота среза - с каким самым медленным сигналом он может работать.
Датчик называется линейным в некотором диапазоне измеряемой величины, если его чувствительность не зависит от значения этой величины.
Постоянная времени - мера инерционности датчика.
Полоса пропускания датчика — это диапазон частот, в котором ординаты АЧХ уменьшаются относительно их максимального значения не более чем на 3 дБ.
- Градуировка
Градуировка датчиков охватывает совокупность операций, позволяющих в графической и аналитической форме выразить соотношение между значением измеряемой величины и выходным сигналом с учетом всех дополнительных факторов, способных изменить выходной сигнал (знак и скорость изменения т, свойства ее материального носителя, возмущающие воздействия, параметры среды)
Простая градуировка:
− а) прямая или абсолютная - эталоны, образцовые средства.
− б) косвенная (сравнительная) - по образцовому датчику;
− в) комплексная - с учетом возмущающих факторов.
Достоверность результатов градуировки характеризуется воспроизводимостью результатов измерений и взаимозаменяемостью датчиков.
- Быстродействие
Быстродействие — это параметр датчика, позволяющий оценить: как выходной сигнал следует во времени за изменением измеряемой величины.
Быстродействие характеризует время, необходимое для того, чтобы влияние переходных процессов на выходную величину стало пренебрежимо малым для заданной точности.
Параметр, используемый для количественного описания быстродействия, называется временем установления tуст - это интервал времени, который должен пройти после приложения ступенчатого сигнала, для того чтобы сигнал на выходе датчика достиг уровня, отличающегося от входного не более чем на заданную величину е.
! От быстродействия следует отличать производительн о сть устройства (обычнохарактерна для цифров ы х систем), определяемую числом операций в секунду. На быстродействие датчика влияют факторы, не связанн ы е с ним н еп осредственно, например окружающая среда.
Лекция 2
Кинестетические датчики.
Датчики положения и перемещения.
Микровыключатели.

Герметизированные контакты (герконы).
В последнее время стали появляться так называемые герконы. Датчики положения SME (герконы) содержат герметичный контакт, который реагирует на приближение магнитного поля, что вызывает изменение выход 

Датчик приближения SME-8-K-LED-230 Датчики положения Festo серии SME-8M, SMT-8M.
Герметизированные магнитоуправляемые контакты представляют собой пластинки из пермаллоя, впаянные в колбу с вакуумом (см. рис.). В отсутствие магнитного поля пластинки разомкнуты/замкнуты, при появлении магнитного поля они замыкаются/размыкаются. Контактирующие концы пластинок покрывают золотом, серебром, родием, смачивают ртутью. Магнитное поле создается постоянным магнитом или электромагнитом. Такое конструктивное решение обеспечивает высокую надежность коммутации в любой среде; количество коммутаций до 109; высокое быстродействие, виброустойчивость.
Оптопары с открытым оптическим каналом. Датчики конечных положений на базе оптопар с открытым оптическим каналом состоят из отдельного источника света и отдельного светоприемника. Если между источником и приемником существует светопрозрачная среда, то на приемнике выделяется сигнал высокого уровня, который можно понимать как логическую единицу; если светопрозрачную среду перекрыть светонепрозрачной шторкой, то на приемнике снизится уровень сигнала, который можно понимать как логический ноль. Оптопару обычно размещают на неподвижном звене, а шторку — на подвижном. В качестве оптопар чаще всего используют полупроводниковые светодиоды и фотоприемники. В этом случае расстояние между срезами фотоприемника и светоисточника не превышает 2...3 мм.
Достоинства оптопар: бесконтактное определение положения, отсутствие обратного воздействия приемника на источник.
Недостатки оптопар: низкий КПД, зависимость от температуры и радиоактивного излучения, временная деградация оптопар.
Кроме прямого применения оптопар в качестве датчиков положения (конечного дискретного), они широко применяются в электронных устройствах мехатроники в кчестве гальванической развязки электронных цепей. Например между микроконтроллером и силовым инвертором в схемах управления электроприводом.
Индукционные потенциометры
Использование: для измерения линейных перемещений, с помощью преобразователя перемещения индукционного типа.
Устройство: индукционный датчик положения содержит неподвижную часть и подвижную часть, установленную с возможностью перемещения относительно неподвижной части с одной степенью свободы. Неподвижная и подвижная части датчика выполнены из диэлектрического материала и обращены друг к другу сторонами с нанесенными на них печатными зигзагоподобными прямоугольными катушками индуктивности, соответственно с пассивными короткими и активными длинными печатными проводниками, которые взаимно параллельны и расположены с одинаковым шагом. Подвижная часть датчика установлена с возможностью перемещения относительно неподвижной части вдоль активных длинных проводников зигзагоподобных прямоугольных катушек. Неподвижная часть индукционного датчика положения может содержать две идентичные катушки, установленные вдоль направления перемещения подвижной части с катушкой, которая при этом расположена в первоначальном состоянии по центру между неподвижными катушками.
Технический результат: расширение диапазона измерений, упрощение конструкции датчика, повышение точности измерений линейных перемещений.


Резольверы-ВТ
Резольвер — это четырехобмоточная двух- и более полюсная электрическая машина с индукционным взаимодействием роторных и статорных обмоток. (вращающиеся трансформаторы (ВТ)
Синусно-косинусный вращающийся трансформатор, резольвер (angle-
component solver) - синусно-косинусный датчик угла, представляющий
трансформатор, состоящий из ротора и статора, несущих по паре взаимно-
перпендикулярных обмоток. При повороте ротора в зависимости от режима
Рис.3
В зависимости от формы выходного сигнала различают: синусно-косинусные, линейные и резольверы-построители.
Вращающимся трансформатором (ВТ) называется индукционная электрическая машина переменного тока, предназначенная для выработки напряжений, пропорциональных синусу и косинусу угла поворота или напряжений, пропорциональных углу поворота ротора машины (в зависимости от схемы включения обмоток статора и ротора).
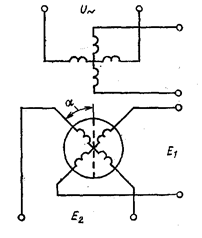
Рис.9. Схема вращающегося трансформатора.
На статоре и роторе ВТ помещаются по две обмотки, сдвинутые в пространстве под углом 90° (рис.9). Магнитные оси этих обмоток взаимно перпендикулярны. Одна из обмоток статора является обмоткой возбуждения и питается от однофазной сети переменного тока. Если при этом ротор ВТ повернуть на угол a, то ЭДС, наводимые в обмотках ротора, будут пропорциональны синусу и косинусу угла поворота:

 (20)
(20)
где Е1,Е2- действующие значение ЭДС в обмотке ротора; Еmax- максимальное значение ЭДС в обмотке ротора (при совпадении осей обмоток ротора и статора).
Максимальное значение ЭДС (без учета потерь) в обмотке ротора определяется из выражения
 (21)
(21)
где U- напряжение возбуждения ВТ;
vр- число витков в обмотке ротора;
vс- число витков в обмотке статора;
К- коэффициент трансформации ВТ.
Следовательно, напряжение, снимаемые с синусной и косинусной обмоток ВТ, определяются следующим образом:
U1=KU sin a; U2=KU cos a. (22)
Вращающиеся трансформаторы применяются в автоматике очень широко как датчики угловых величин, а так же как функциональные элементы аналоговых счетно-решающих устройств. Они применяются при решении тригонометрических задач, связанных с вычислением параметров треугольников и преобразованием координат.
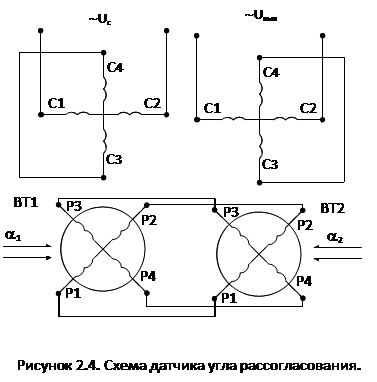
Счетно-решающие устройства, датчики рассогласования угла, ЛВТ.
Различные схемы применения СКВТ рассматриваются на ЛР. Наиболее распространенная схема -датчик угла рассогласования приведена ниже.
Т.о. для получения резолъверов различных типов можно использовать одну и ту же машину с двумя обмотками на статоре и двумя на роторе при различных способах их включения.
Устройство: конструктивно резольвер выполнен подобно асинхронному двигателю с фазным ротором, который, как и статор, представляет собой многополюсный сердечник из листов электротехнической стали или пермаллоя. В пазах ротора и статора размещены по две распределенные обмотки, сдвинутые на 90 одна относительно другой. В общем случае пазов может быть больше, чем полюсов. Концы обмоток выведены на разъем, причем статорные непосредственно, а роторные с помощью четырех токосъемных колец ротора и щеток.
Выпускают также бесконтактные резольверы с подключением роторных обмоток посредством плоских пружин с углом поворота до 700 и резольверы со вспомогательными переходными трансформаторами.
Резольверы широко используют в качестве ДПП в системах управления оборудованием, роботами и манипуляторами.
Совместно с АЦП ВТ разработаны и широко используются прецизионные датчики положения: (12-20) разрядные.
Пример серийно выпускаемого ВТ 100.

Резольверы широко используют в качестве ДПП в системах управления оборудованием, роботами и манипуляторами.
Редуктосины
Его принцип действия напоминает многополюсный резольвер. Однако при этом редуктосин обычно выполняют бескорпусным (так называемая встраиваемая конструкция), что позволяет строить мехатронные модули, объединяющие двигатель, датчик и систему управления двигателем. Такие схемы применяют в бесконтактных моментных приводах, где редуктосин служит для контроля положения ротора двигателя. С этой целью его устанавливаюг непосредственно на валу ротора без применения повышающих редукторов.
Индукционный редуктосин представляет собой бесконтактный синус-косинусный поворотный трансформатор. Первичная и две вторичные обмотки размещены на статоре. Ротор выполнен в виде зубчатого кольца из электротехнической стали.


Редуктосины не имеют скользящих контактов, что повышает надежность и точность их работы. При питании первичной обмотки синусоидальным напряжением со вторичных обмоток снимают два напряжения, амплитуды которых изменяются в функции угла поворота ротора. Повороту ротора на угол, равный зубцовому делению, соответствует полный период изменения амплитуды выходного напряжения (зубцовым делением ротора называется расстояние между зубцами ротора).

К достоинствам редуктосинов можно отнести их высокую точность на большом диапазоне измерений, отсутствие щеточного узла и сравнительно малые габаритные размеры. Они имеют те же недостатки, что и все ЭДП.
Отметим, что резольверы и редуктосины являются поворотными ЭДП, т. е. на их основе можно строить только измерители угла.
Индуктосины
Индуктосином называют бесконтактную информационную машину без магнитопровода с печатными первичной и вторичной обмотками, возбуждаемую однофазным напряжением. Выходное напряжение индуктосина является функцией углового положения ротора.
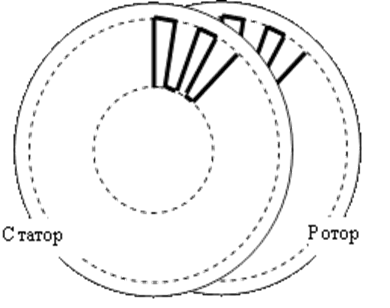
Конструктивно индуктосин представляет собой два диска (ротор и статор) из изоляционного материала (керамика, стекло). Один из дисков соединяется с валом, угловое положение которого подлежит изменению, второй неподвижен. На торцевых поверхностях, обращенных друг к другу, диски несут печатные обмотки.
Индуктосин
Индуктосины были разработаны для использования в специальных устройствах автоматики, однако получили широкое применение, и в настоящее время являются самыми перспективными прецизионными ЭДП. Более 30 % станков с ЧПУ оснащены индуктосинами. Главное достоинство индуктосинов — возможность тиражирования магнитопроводов при использовании одного комплекта фотошаблонов. Обмотки индуктосина выполнены на соосных изоляционных (обычно керамических) пластинах путем высокоточного химического травления. Такая технология обеспечивает одинаковые реактивные сопротивления в цепях.
Сельсины
Сельсин - это информационная электрическая машина переменного тока, вырабатывающая напряжения, амплитуды и фазы которых определяются угловым положением ротора.
Сельсины позволяют осуществить согласованное вращение или поворот механизмов без общего механического вала.

Рис. 3. Сельсин
Известны два режима работы сельсинов: индикаторный и трансформаторный. При работе сельсинов в индикаторном режиме происходит передача на расстояние угла поворота механической системы.
При работе сельсинов в трансформат