

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Выпускная квалификационная работа: Основная часть ВКР, как правило, состоит из двух-трех глав, каждая из которых, в свою очередь...
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Интересное:
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Цели и задачи предмета ТАУ. Понятие автоматических устройств. Основные понятия ТАУ: система, звенья, схемы и др.
Основной целью автоматизации является исключение непосредственного участия человека в управлении производственными процессами и другими техническими объектами.
Задача автоматизации состоит в осуществлении автоматического управления различными техническими процессами.
Задача изучения дисциплины "Теория автоматического управления" состоит в освоении основных принципов построения и функционирования автоматических систем управления на базе современных математических методов и технических средств.
Техническое устройство, выполняющее операции управления без непосредственного участия человека, называется автоматическим устройством.
Система, в которой все рабочие операции и операции управления выполняют автоматические устройства, называется автоматичекой. Система, в которой автоматизирована только часть операций, другая же их часть сохраняется за людьми, называется автоматизированной (частично автоматической).
Частным случаем управления является регулирование. При регулировании координаты процесса (давление, температура, расход, положение и пр.) поддерживаются на заданном значении с помощью специальных устройств – автоматических регуляторов. Совокупность регулируемого объекта и автоматического регулятора образует систему автоматического регулирования.
Устройство управления — совокупность устройств, с помощью которых осуществляется управление входами объекта управления.
Регулирование — частный случай управления, цель которого заключается в поддержании на заданном уровне одного или нескольких выходов объекта управления.
|
|
Регулятор — преобразует ошибку регулирования ε(t) в управляющее воздействие, поступающее на объект управления.
Задающее воздействие g(t) — определяет требуемый закон регулирования выходной величины.
Ошибка регулирования ε(t) = g(t) — y(t), разность между требуемым значением регулируемой величины и текущим её значением. Если ε(t) отлична от нуля, то этот сигнал поступает на вход регулятора, который формирует такое регулирующее воздействие, чтобы в итоге с течением времени ε(t) = 0.
Возмущающее воздействие f(t) — процесс на входе объекта управления, являющийся помехой управлению.
Системы автоматического управления:
Функциональная схема элемента — схема системы автоматического регулирования и управления, составленная по функции, которую выполняет данный элемент.
Выходные сигналы — параметры, характеризующие состояние объекта управления и существенные для процесса управления.
Выходы системы — точки системы, в которых выходные сигналы могут наблюдаться в виде определенных физических величин.
Входы системы — точки системы, в которых приложены внешние воздействия.
Входные сигналы:
Системы:
|
|
Элементарное звено – неделимое звено, имеющее по одному входу и выходу, описываемое дифференциальным уравнением не выше второго порядка и пропускающее сигнал только в одном направлении.
Наиболее удобно классифицировать типовые звенья, используя частные формы линейного дифференциального уравнения второго порядка, представленного ниже:
a0 y′′(t) + a1 y′(t) + a2 y(t) = b0 x′(t) + b1 x(t) (1.63.)
Комбинированное управление

Комбинированное управление заключено в сочетании двух принципов управления по отклонению и внешнему возмущению. Т.е. сигнал управления на объект формируется двумя каналами. Первый канал чувствителен к отклонению регулируемой величины от задания. Второй формирует управляющее воздействие непосредственно из задающего или возмущающего сигнала.
Достоинства:
Недостатки:
9. Цели управления. Разновидности систем по целям управления. Примеры.
Управление- это такая организация того или иного процесса, которая обеспечивает достижение определенных целей.
Автоматическое управление – это осуществление совокупности воздействий, выбранных из множества возможных, на объект управления, с целью оптимизировать в определенном заданном смысле его состояние и поведение.
Объект управления — изменение состояния объекта в соответствии с заданным законом управления. Такое изменение происходит в результате внешних факторов, например, вследствие управляющих или возмущающих воздействий.
Системы автоматического регулирования
· Системы автоматической стабилизации. Выходное значение поддерживается на постоянном уровне (заданное значение — константа). Отклонения возникают за счёт возмущений и при включении.
|
|
· Системы программного регулирования. Заданное значение изменяется по заранее заданному программному закону f. Наряду с ошибками, встречающимися в системах автоматического регулирования, здесь также имеют место ошибки от инерционности регулятора.
· Следящие системы. Входное воздействие неизвестно. Оно определяется только в процессе функционирования системы. Ошибки очень сильно зависят от вида функции f(t).
· Системы экстремального регулирования
Способны поддерживать экстремальное значение некоторого критерия (например, минимальное или максимальное), характеризующего качество функционирования данного объекта. Критерием качества, который обычно называют целевой функцией, показателем экстремума или экстремальной характеристикой, может быть либо непосредственно измеряемая физическая величина (например, температура, ток, напряжение, влажность, давление), либо КПД, производительность и др.
Выделяют:
· Системы с экстремальным регулятором релейного действия. Универсальный экстремальный регулятор должен быть хорошо масштабируемым устройством, способным исполнять большое количество вычислений в соответствии с различными методами.
· Сигнум-регулятор используется как аналоговый анализатор качества, однозначно характеризующий лишь один подстраиваемый параметр систем. Он состоит из двух последовательно включенных устройств: Сигнум-реле (D-триггер) и исполнительный двигатель (интегратор).
· Экстремальные системы с безынерционным объектом
· Экстремальные системы с инерционным объектом
· Экстремальные системы с плавающей характеристикой. Используется в случае, когда экстремум меняется непредсказуемым или сложно идентифицируемым образом.
Системы с синхронным детектором (экстремальные системы непрерывного действия). В прямом канале имеется дифференцирующее звено, не пропускающее постоянную составляющую. Удалить или зашунтировать по каким-либо причинам это звено невозможно или неприменимо. Для обеспечения работоспособности системы используется модуляция задающего воздействия и кодирование сигнала в прямом канале, а после дифференцирующего звена устанавливают синхронный детектор фазы.
|
|
· Адаптивные системы автоматического управления
Служат для обеспечения желаемого качества процесса при широком диапазоне изменения характеристик объектов управления и возмущений.
По виду информации в управляющем устройстве
· Замкнутые САУ
В замкнутых системах автоматического регулирования управляющее воздействие формируется в непосредственной зависимости от управляемой величины. Связь выхода системы с его входом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной.
· Разомкнутые САУ
Сущность принципа разомкнутого управления заключается в жёстко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в САУ модели управляемого объекта. Примеры таких систем: таймер, блок управления светофора, автоматическая система полива газона, автоматическая стиральная машина и т. п.
В свою очередь, различают:
· Разомкнутые по задающему воздействию
· Разомкнутые по возмущающему воздействию
Характеристика САУ
В зависимости от описания переменных системы делятся на линейные и нелинейные.
· К линейным относятся системы, состоящие из элементов описания, которые задаются линейными алгебраическими или дифференциальными уравнениями.
Если все параметры уравнения движения системы не меняются во времени, то такая система называется стационарной. Если хотя бы один параметр уравнения движения системы меняется во времени, то система называется нестационарной или с переменными параметрами.
· Системы, в которых определены внешние (задающие) воздействия и описываются непрерывными или дискретными функциями во времени, относятся к классу детерминированных систем.
· Системы, в которых имеет место случайные сигнальные или параметрические воздействия и описываются стохастическими дифференциальными или разностными уравнениями, относятся к классу стохастических систем.
· Если в системе есть хотя бы один элемент, описание которого задается уравнением частных производных, то система относится к классу систем с распределенными переменными.
· Системы, в которых непрерывная динамика, порождаемая в каждый момент времени, перемежается с дискретными командами, посылаемыми извне, называются гибридными системами.
Примеры систем автоматического управления
В зависимости от природы управляемых объектов можно выделить биологические, экологические, экономические и технические системы управления. В качестве примеров технического управления можно привести:
|
|
· Системы дискретного действия или автоматы (торговые, игровые, музыкальные).
· Системы стабилизации напряжения, температуры, уровня жидкости, оборотов, уровня звука, изображения или магнитной записи и др. Это могут быть управляемые комплексы летательных аппаратов, включающие в свой состав системы автоматического управления двигателя, рулевыми механизмами, автопилоты и навигационные системы.
10. Понятие ошибки регулирования. Место формирования ошибки при реализации различных принципов управления. Виды систем по величине ощибки регулирования.
Качество работы САУ оценивают по величинам статической и динамической ошибок. По этим характеристикам автоматические системы бывают статические и астатические.
Статическая ошибка - это разность величин регулируемого параметра в исходном и конечном (после окончания регулирования) состояниях равновесия системы.

Рисунок 6.17 – График регулирования астатической (а) и статической (б) САУ.
В астатической системе статическая ошибка равна нулю, т.е. система после процесса регулирования возвращается в исходное состояние равновесия. В астатических САУ конечное и исходное равновесие совпадает с заданием. Поэтому в этих САУ динамическая ошибка равна максимальному отклонению параметра в процессе регулирования (рис. 6.17а).
В статической системе в установившемся состоянии - через достаточно долгое время после начала регулирования τ, всегда имеется статическая ошибка регулирования (рис.6.17б).
Динамическая ошибка - это максимальное в процессе регулирования отклонение регулируемого параметра от конечного состояния равновесия
Δдин= (Yвых маx - Yвых ном).
Время регулирования - это отрезок времени Δτ с момента нанесения на замкнутую САУ возмущающего воздействия, по истечении которого отличие регулируемого параметра от конечного состояния равновесия становится равным и меньше ± 5% от заданной величины. Если заданная величина равна нулю, то ± 5% берут от величины динамической ошибки.
Перерегулирование - это динамическая ошибка, отнесённая к номинальной величине регулируемого параметра в процентах.
Перерегулирование вычисляют по формуле:
σ = (Yвых маx - Yвых ном)100%/Yвых ном .
Степень затухания - это показатель качества, который характеризует, насколько процентов уменьшается амплитуда колебаний выходного сигнала системы за один период колебаний. Степень затухания Ψ определяется по формуле:
ψ = (Δдин - Δ3) 100% / Δдин,
где: Δз - амплитуда колебаний третьего периода. Если Δз = 0, то Ψ = 100%.
Обобщённый показатель качества. Для определения величины этого показателя вычисляют интеграл (площадь подынтегральной фигуры) изменения в процессе регулирования выходного сигнала системы за период времени регулирования:
tрег
J = ∫ (Δ)2dt.
0
Δ – амплитуду колебаний берут в квадрате, чтобы просуммировать как положительные, так и отрицательные отклонения выходного сигнала. Естественно, чем меньше динамическая, статическая ошибки и время регулирования, тем меньше величина интеграла J и выше качество работы САУ.
11. Законы управления. Понятие закона управления. Виды законов управления. Понятие линейных и нелинейных законов.
Требования, предъявляемые к моделям.
1. Универсальность - характеризует полноту отображения моделью изучаемых свойств реального объекта.
2. Адекватность - способность отражать нужные свойства объекта с погрешностью не выше заданной.
3. Точность - оценивается степенью совпадения значений характеристик реального объекта и значения этих характеристик полученных с помощью моделей.
4. Экономичность - определяется затратами ресурсов ЭВМ памяти и времени на ее реализацию и эксплуатацию.
18. Функциональная схема и принцип действия замкнутой системы автоматического регулирования частоты вращения двигателя.
Функциональная схема предназначена для разъяснения процессов, происходящих в отдельных функциональных цепях изделия или изделии в целом. Для сложного изделия разрабатывается несколько функциональных схем, поясняющих происходящие процессы при различных предусмотренных режимах работы. Количество функциональных схем, разрабатываемых на изделие, степень их детализации и объем помещаемых сведений определяется разработчиком с учетом особенностей изделия.
На схеме изображают функциональные части изделия (элементы, устройства, функциональные группы) и связи межу ними. Графическое построение схемы должно наглядно отражать последовательность функциональных процессов, происходящих в изделии. Действительное расположение в изделии элементов и устройств может не учитываться.
Функциональные части и связи между ними изображают в виде условных графических обозначений, установленных в соответствующих стандартах на условные графические обозначения этих групп и элементов. В этом случае действуют правила выполнения принципиальных схем. Отдельные функциональные части на схеме допускается изображать в виде прямоугольников. В этом случае эти части схемы следует выполнять по правилам структурных схем.
По функциональной схеме указывают:
- для функциональных групп - обозначение, присвоенное ей на принципиальной схеме, или наименование (если функциональная группа изображена в виде условного графического обозначения, то ее наименование не указывают),
- для каждого устройства и элемента, изображенного условными графическими обозначениями - буквенно-цифровое позиционное обозначение, присвоенное на принципиальной схеме, его тип,
- для каждого устройства, изображенного прямоугольником - позиционное обозначение, присвоенное ему на принципиальной схеме, его наименование и тип или обозначение документа, на основании которого это устройство применено. Обозначение документа указывают и для устройства, изображенного в виде условного графического обозначения. Наименования, типы и обозначения функциональных частей, изображенных прямоугольниками, рекомендуется вписывать внутрь прямоугольников. Сокращенные или условные наименования должны быть пояснены на поле схемы.
Замкнутые системы автоматического управления (САУ) отличаются от разомкнутых применяемой аппаратурой и полнотой автоматизации. В разомкнутой САУ задающее устройство (включающая, регулирующая аппаратура) не получает информацию о фактическом режиме работы электроустановки (приводного электродвигателя, рабочей машины).
В замкнутой САУ информация передается на элементы управления, что сопровождается подачей соответствующих командных сигналов. Цепочка, передающая такую информацию, замыкает контур управления, образуя замкнутую САУ, или САУ с обратными связями.
Различие между замкнутой и разомкнутой САУ можно пояснить па примере регулирования скорости электродвигателя в системе генератор — двигатель (Г—Д). В разомкнутой САУ (рис. 1,а) заданная скорость электродвигателя устанавливается вручную потенциометром П. Контроль скорости осуществляется визуально по тахометру, получающему питание от тахогенератора ТГ. Всякое отклонение скорости от заданной оператор устраняет воздействием на движок потенциометра.
В замкнутой САУ (рис. 1,б) якорь тахогенератора ТГ включен в цепь обмотки возбуждения генератора ОВГ, создавая замкнутую систему, или систему с обратной связью (в данном случае с обратной связью по скорости).

Рис. 1. Схема регулирования электродвигателя в системе Г- М: а - разомкнутая САУ, б - замкнутая САУ
Ток, создаваемый тахогенератором (Iтг) в замкнутой цепи, направлен навстречу току потенциометра (Iп), и в цепи действует результирующий ток, равный геометрической разности этих токов. Движком потенциометра оператор устанавливает такое значение результирующего тока в обмотке возбуждения ОВГ, при котором обеспечивается соответствующая скорость электродвигателя. На этом роль оператора заканчивается. В дальнейшем система автоматически с определенной точностью поддерживает заданный режим работы электропривода.
Допустим, что в результате наброса нагрузки скорость электродвигателя уменьшилась по сравнению с заданной. Уменьшение скорости сопровождается соответствующим уменьшением скорости тахогенератора и напряжения на его зажимах. Это в свою очередь вызовет уменьшение тока Iтг в цепи обратной связи и в определенном положении движка потенциометра — увеличение результирующего тока в обмотке возбуждения генератора. Соответственно возрастут напряжение на генераторе и скорость электродвигателя.
Процесс увеличения скорости и напряжения будет продолжаться до тех пор, пока ток в цепи обратной связи не достигнет установленного значения, а скорость электродвигателя — заданной величины.
При анализе систем автоматического управления широко используют функциональные схемы. На рис. 2 показана функциональная схема САУ, которая включает следующие элементы:
1 — задающее устройство, которое задает режим работы, подает командный, начальный импульс или сигнал,
2 — элемент сравнения. В него входит сигнал Х1 от задающего устройства, сигнал Х0, определяющий норму или уровень контролируемой величины. С учетом сигнала от элемента 9-й главной обратной связи элемент 2 сравнивает поступившие сигналы и посылает дальше скорректированный сигнал Х2,
3 — преобразующий элемент, поступающий в него сигнал оп преобразует в другую форму, более удобную для дальнейшей передачи. Например, сигнал Х2 был дан в форме гидравлического (пневматического, механического) давления. Элемент 3 преобразовал его в электрический ток. Так как подобного рода преобразование может требовать дополнительной энергии, то элемент 3 связан с источником энергии ПЭ,
4 — суммирующий элемент, в него поступают два сигнала: Х3 и Х8 от корректирующего элемента (элемента памяти) 8. Эти сигналы суммируются элементом 4 в направляются в следующий элемент,
5 — элемент усиления, входящий сигнал Х1 может быть слабым и для последующей передачи должен быть усилен. Это делается элементом 5, который связан с источником энергии ПЭ,
6 — исполнительный элемент, выполняет полученный сигнал (электродвигатель, электромагнитное реле, серводвигатель),
7 — регулируемый объект, или рабочая машина.

Рис. 2. Функциональная схема САУ
19. Принцип действия и математическое моделирование посредством дифференциальных уравнений замкнутой системы автоматического регулирования частоты вращения двигателя.
(??????????????????????????????????????????????????????)
20. Общий вид дифференциального уравнения звена системы. Праметры, входящие в дифференциальное уравнения звена. Преобразования Лапласа. Цели преобразования уравнения к виду Лапласа.
Основной характеристикой любой динамической системы, наиболее полно отражающей ее свойства, является дифференциальное уравнение.
Процессы, описывающие линейную САУ, соответственно, будут описываться линейным дифференциальным уравнением.
Общий метод составления дифференциального уравнения системы: для каждого звена автоматической системы в соответствии с его теорией составляют дифф.ур. связывающее его выходную величину с входной. В результате получают систему уравнений, количество которых равно числу звеньев. Входные и выходные величины – основные, остальные промежуточные, которые из системы исключаются при ее решении.
Уравнение линейного динамического звена имеет следующий общий вид:
|
Так как все функции и их производные стоят в первой степени, для такого дифференциального уравнения выполняется принцип суперпозиции, следовательно, такая система линейна.
Дифференциальные уравнения сложны, для упрощения описания САУ и анализа их функционирования применяется преобразование Лапласа. Делаем мы это, чтобы получить передаточную функцию САУ
Передаточная функция системы – это отношение изображения по Лапласу выходной управляемой величины к изображению по Лапласу задающего воздействия.
Подвергнем уравнение (1) преобразованию Лапласа, считая начальные условия нулевыми и заменяя оригиналы сигналов их изображениями по Лапласу
 .
.
Используя теоремы преобразования Лапласа линейности и дифференцирования, получим операторное уравнение, связывающие изображения входного и выходного сигналов

| (2) |
Преобразуем уравнение (2) к следующему виду

| (3) |
Получим из (3) отношение изображений выходного и входного сигналов

| (4) |
Отношение (4) не зависит от изображений сигналов, определяется только параметрами самого динамического звена ( ), имеет вид дробно-рациональной функции.
), имеет вид дробно-рациональной функции.
Отношение изображений выходного и входного сигналов называют передаточной функцией динамического звена
 .
.
Уравнение вида
 ,
,
называют характеристическим уравнением динамического звена, так как знаменатель передаточной функции – это характеристический полином дифференциального уравнения, описывающего динамическое звено.
Преобразование Лапласа находит широкое применение во многих областях математики (операционное исчисление), физики и техники:
· Решение систем дифференциальных и интегральных уравнений — с помощью преобразования Лапласа легко переходить от сложных понятий математического анализа к простым алгебраическим соотношениям.
· Расчёт передаточных функций динамических систем, таких, к примеру, как аналоговые фильтры.
· Расчёт выходных сигналов динамических систем в теории управления и обработке сигналов — так как выходной сигнал линейной стационарной системы равен свёртке её импульсной характеристики с входным сигналом, преобразование Лапласа позволяет заменить эту операцию на простое умножение.
· Расчёт электрических схем. Производится путём решения дифференциальных уравнений, описывающих схему операторным методом.
· Решение нестационарных задач математической физики
21. Передаточная функция системы. Пример вывода передаточной функции.
Параллельное соединение

При параллельном соединении все звенья имеют одну входную величину, выходные величины суммируются.

Виды обратной связи
Обратная связь может быть:
- положительной, если сигнал Х, снимаемый с выхода звена с обратной связью, суммируется с сигналом g(t) на входе.
- отрицательной, если Х вычитается.
Если Wос(p)=k (где k - коэффициент обратной связи) - то обратная связь жесткая. В установившемся режиме Wос(p) не равна 0. Такая связь может действовать и в установившемся режиме, и в переходном.
Если Wос(p)=k*p - то обратная связь гибкая. (p-оператор дифференцирования d/dt). В установившемся режиме Wзамкн(p) цепи с обратной связью равна передаточной функции исходной цепи W(p), т.е. Wос=0.
Основные виды устойчивости
ОРБИТАЛЬНАЯ УСТОЙЧИВОСТЬ
Вводится понятие ε-окрестности невозмущенного движения. С этой целью рассматривается траектория невозмущенного движения М 0 М и строится криволинейный цилиндр радиусом ε, осью которого
является эта траектория.
Считается, что траектория возмущенного движения мало отклоняется от траектории невозмущенного движения, если она целиком лежит в ε-окрестности невозмущенного движения (ε − мало). Возмущенное движение исходит из точки M 0′ (рис. 6.15).
Вопрос №52
Переходный режим возникает из-за несоответствия состояния системы поступающим на нее воздействиям. Несоответствие может возникать вследствие наличия ступенчатых слагаемых в воздействии (и) или в его некоторых младших производных. Второй причиной возникновения переходного процесса является несоответствие начальных условий (значений сигналов на выходах интеграторов модели системы в момент подачи воздействия) подаваемому на модель гладкому сигналу. В первом случае переходный процесс может возникать в любые моменты времени, а во втором случае, когда на систему подается достаточно гладкий сигнал, переходный процесс происходит лишь после подачи сигнала - однократно, после чего, сигналы, поступающие на систему и приведенные ко входу первого интегратора модели становятся непрерывными, изменяются плавно, что и является причиной и признаком установившегося режима. Таким образом сигналы, воздействия, поступающие на некоторый линейный объект или систему, можно разделить на условно-гладкие, такие, которые не приводят к возникновению переходного процесса, и "шероховатые", приводящие к переходному процессу. Суть переходного режима это перераспределение энергии между накапливающими элементами системы, такое, которое обеспечивает "согласование" состояния и поведения системы с входным воздействием. Накапливающими элементами, например, в электрической цепи являются конденсаторы и катушки индуктивности, в механических системах это пружины и массивные элементы.
Импульсная характеристика
Физический смысл- уменьшая в 2..4…n раз длительность (г) одновременно в 2…4…n раз возрастает амплитуда, а произведение равно 1. То есть отрезок по времени будет всегда стремиться к малой величине, а отрезок по амплитуде к большой.

Вопрос №53
Устойчивой называется система, которая под действием внешних условий не меняет характер своего движения и после прекращения действий внешних возмущений компенсирует отклонения, т.е. после воздействия внешних условий система затухает.Чтобы охарактеризовать устойчивость системы, анализируют решение дифференциальных уравнений динамики. Для этого решения оказывается достаточным охарактеризовать корни уравнения.

Если изобразить корни характеристического уравнения системы точками на комплексной плоскости (рис. 7.3), то найденное выше общее условие устойчивости линейной системы можно сформулировать еще так: условием устойчивости системы является расположение всех корней характеристического уравнения, т.е. полюсов передаточной функции системы, в левой комплексной полуплоскости или, короче, все они должны быть левыми.

Вопрос №56 (Метод Д-разбиения)
Для исследования влияния различных параметров систем на её устойчивость используют определение областей устойчивости, т.е. значения параметров, при которых система оказывается устойчивой. Полная совокупность всех прямых разбивающая всю плоскость на области с определённым распределением корней называется Д-разбиением плоскости параметров. Характеристическое уравнение можно представить в виде:
Н(р)=Р(р)+Q(р), где Р(р) и Q(р) комплексные поленомы. Для построения областей устойчивости выделяют параметр, относительное которого будет исследоваться изменение устойчивости (коэффициент усиления k).
Н(р)=Р(р)+kQ(р)=0 и далее решается характеристическое уравнение относительно этого параметра и осуществляется переход в частотную область
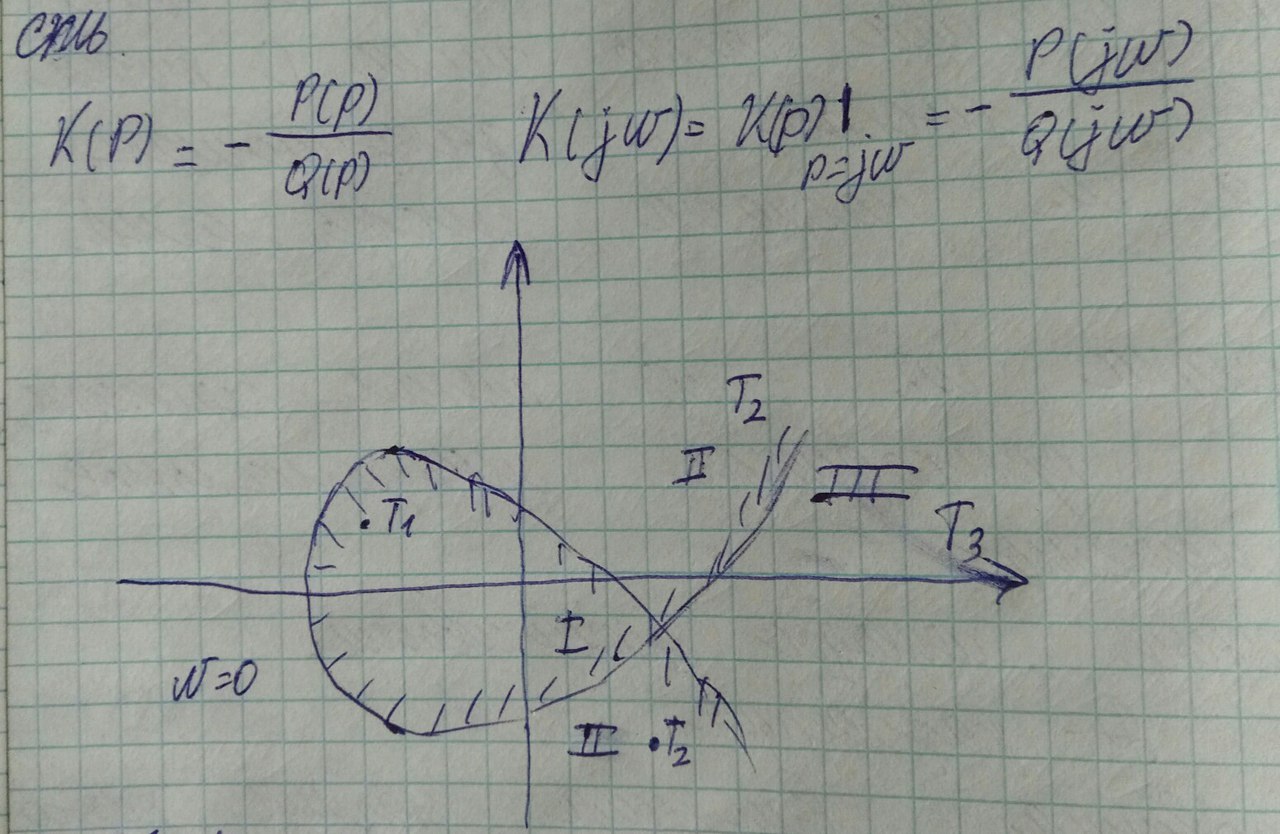
Кривые на комплексной плоскости построенные по функциям i(w) называются годографам параметра k
Годограф разбивает плоскость на области с определенным распределением корней. Годограф штрихуется слева по мере увеличения частоты. Система является устойчивой во всей области, если она устойчива в одной из точек внутри этой области.
Цели и задачи предмета ТАУ. Понятие автоматических устройств. Основные понятия ТАУ: система, звенья, схемы и др.
Основной целью автоматизации является исключение непосредственного участия человека в управлении производственными процессами и другими техническими объектами.
Задача автоматизации состоит в осуществлении автоматического управления различными техническими процессами.
Задача изучения дисциплины "Теория автоматического управления" состоит в освоении основных принципов построения и функционирования автоматических систем управления на базе современных математических методов и технических средств.
Техническое устройство, выполняющее операции управления без непосредственного участия человека, называется автоматическим устройством.
Система, в которой все рабочие операции и операции управления выполняют автоматические устройства, называется автоматичекой. Система, в которой автоматизирована только часть операций, другая же их часть сохраняется за людьми, называется автоматизированной (частично автоматической).
Частным случаем управления является регулирование. При регулировании координаты процесса (давление, температура, расход, положение и пр.) поддерживаются на заданном значении с помощью специальных устройств – автоматических регуляторов. Совокупность регулируемого объекта и автоматического регулятора образует систему автоматического регулирования.
Устройство управления — совокупность устройств, с помощью которых осуществляется управление входами объекта управления.
Регулирование — частный случай управления, цель которого заключается в поддержании на заданном уровне одного или нескольких выходов объекта управления.
Регулятор — преобразует ошибку регулирования ε(t) в управляющее воздействие, поступающее на объект управления.
Задающее воздействие g(t) — определяет требуемый закон регулирования выходной величины.
Ошибка регулирования ε(t) = g(t) — y(t), разность между требуемым значением регулируемой величины и текущим её значением. Если ε(t) отлична от нуля, то этот сигнал поступает на вход регулятора, который формирует такое регулирующее воздействие, чтобы в итоге с течением времени ε(t) = 0.
Возмущающее воздействие f(t) — процесс на входе объекта управления, являющийся помехой управлению.
Системы автоматического управления:
Функциональная схема элемента — схема системы автоматического регулирования и управления, составлен
|
|
|

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!