

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...
Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...
Топ:
История развития методов оптимизации: теорема Куна-Таккера, метод Лагранжа, роль выпуклости в оптимизации...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Компьютер может иметь до четырех последовательных портов СОМ 1-COM4. СОМ-порты имеют внешние разъемы-вилки DB25P или DB9P, выведенные на заднюю панель компьютера (назначение выводов приведено в табл. 4).
СОМ-порты реализуются на микросхемах UART, совместимых с семейством 18250. Они занимают в пространстве ввода/вывода по 8 смежных 8-битных регистров и могут располагаться по стандартным базовым адресам. Порты вырабатывают аппаратные прерывания. Возможность разделяемого использования одной линии запроса несколькими портами (или ее разделения с другими устройствами) зависит от реализации аппаратного подключения и ПО. При использовании портов, установленных на шину ISA, разделяемые прерывания обычно не работают.
Управление последовательным портом разделяется на два этапа – предварительное конфигурирование (Setup) аппаратных средств порта и текущее (оперативное) переключение режимов работы прикладным или системным ПО. Конфигурирование СОМ-порта зависит от его исполнения. Порт на плате расширения конфигурируется джамперами на самой плате. Порт на системной плате конфигурируется через BIOS Setup.
Конфигурированию подлежат следующие параметры:
· Базовый адрес, который может иметь значения 3F8h, 2F8h, 3E8h (ЗЕОЬ, 338h) или 2E8h (2EOh, 238h). При инициализации BIOS проверяет наличие портов по адресам именно в этом порядке и присваивает обнаруженным портам логические имена СОМ1, COM2, COM3 и COM4. Для PS/2 стандартными для портов СОМЗ-СОМ8 являются адреса 3220h, 3228h, 4220h, 4228h, 5220h и 5228h соответственно.
· Используемая линия запроса прерывания: для СОМ1 и COM3 обычно используется IRQ4 или IRQ11, для COM2 и COM4 - IRQ3 или IRQ 10. В принципе номер прерывания можно назначать в произвольных сочетаниях с базовым адресом (номером порта), но некоторые программы и драйверы (например, драйверы последовательной мыши) настроены на стандартные сочетания. Каждому порту, нуждающемуся в аппаратном прерывании, назначают отдельную линию, не совпадающую с линиями запроса прерываний других устройств. Прерывания необходимы для портов, к которым подключаются устройства ввода, UPS или модемы. При подключении принтера или плоттера прерываниями пользуются только многозадачные ОС (не всегда), и этот дефицитный ресурс PC можно сэкономить. Также прерываниями обычно не пользуются при связи двух компьютеров нуль-модемным кабелем.
· Канал DMA (для UART 16450/16550, расположенных на системной плате) – разрешение использования и номер канала DMA. Режим DMA при работе с СОМ-портами используют редко.
Режим работы порта по умолчанию (2400 бит/с, 7 бит данных, 1 стоп-бит и контроль четности), заданный при инициализации порта во время BIOS POST, может изменяться в любой момент при настройке коммуникационных программ или командой DOS MODECOMx: с указанием параметров.
Неисправности и тестирование СОМ-портов
Неполадки с СОМ-портами случаются (выявляются) при установке новых портов или неудачном подключении внешних устройств.
Проверка конфигурирования
Тестирование последовательных портов (как и параллельных) начинают с проверки их опознавания системой. Список адресов установленных портов обычно появляется в таблице, выводимой BIOS перед загрузкой ОС. Список можно посмотреть с помощью тестовых программ или прямо в BIOS Data AREA с помощью отладчика.
Если BIOS обнаруживает меньше портов, чем установлено физически, вероятно, двум портам присвоен один адрес или установлен нестандартный адрес какого-либо порта. Проблемы могут возникать с адресами портов COM3 и COM4: не все версии BIOS будут искать порты по альтернативным адресам 3E0h, 338h, 2E0h и 238h; иногда не производится поиск по адресам 3E8h и 2E8h. Нумерация найденных портов отображаемая в заставке, может вводить в заблуждение: если установлены два порта с адресами 3F8h и 3E8h, в заставке они могут называться СОМ1 и COM2, и по этим именам на них можно ссылаться. Однако те же порты в заставке могут называться и СОМ 1 и COM3 (поскольку 3E8h является штатным адресом для COM3), но попытка сослаться на порт COM3 будет неудачной, поскольку в данном случае адрес 3E8h будет находиться в ячейке 0:402h BIOS Data Area, соответствующей порту COM2, а в ячейке порта COM3 (0:404h) будет нуль – признак отсутствия такового порта.
"Объяснить" системе, где какой порт, можно вручную любым отладчиком, занеся правильные значения базовых адресов в ячейки BIOS Data Area (это придется делать каждый раз после перезагрузки ОС перед использованием "потерянного" порта). Существуют тестовые утилиты, позволяющие находить порты (например, Port Finder).
Если двум портам назначен один и тот же адрес, тестовая программа обнаружит ошибки порта только с использованием внешней заглушки (External LoopBack). Программное тестирование порта без заглушки не покажет ошибок, поскольку при этом включается диагностический режим и конфликтующие (по отдельности исправные) порты будут работать параллельно, обеспечивая совпадение считываемой информации. В реальной жизни нормальная работа конфликтующих портов невозможна. Разбираться с конфликтом адресов удобно, последовательно устанавливая порты и наблюдая за адресами, появляющимися в списке.
Если физически установлен только один порт и его не обнаруживает BIOS, причины те же, что с LPT-портом: либо он отключен при конфигурировании, либо вышел из строя. Неисправность может устраниться при вынимании/вставке платы адаптера в слот системной шины.
При работе с СОМ-портом задействуются соответствующие аппаратные прерывания – их используют при подключении модема, мыши и других устройств ввода. Неработоспособность этих устройств может быть вызвана некорректной настройкой запроса прерывания. Здесь возможны как конфликты с другими устройствами, так и несоответствие номера прерывания адресу порта.
Функциональное тестирование
В первом приближении СОМ-порт можно проверить диагностической программой (Checkit) без использования заглушек. Этот режим тестирования проверяет микросхему UART (внутренний диагностический режим) и вырабатывание прерываний, но не входные и выходные буферные микросхемы, которые являются более частыми источниками неприятностей. Если тест не проходит, причину следует искать или в конфликте адресов/прерываний, или в самой микросхеме UART.
Для более достоверного тестирования рекомендуется использовать внешнюю заглушку, подключаемую к разъему СОМ-порта (рис. 4.23). В отличие от LPT-порта у СОМ-порта количество входных сигналов превышает количество выходных, что позволяет выполнить полную проверку всех цепей. Заглушка соединяет выход приемника со входом передатчика. Обязательная для всех схем заглушек перемычка RTS- CTS позволяет работать передатчику – без нее символы не смогут передаваться. Выходной сигнал DTR обычно используют для проверки входных линий DSR, DCD и RI.
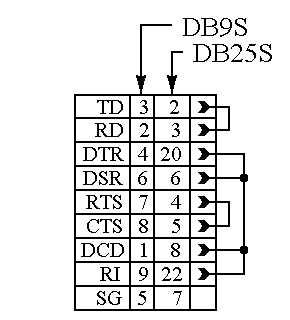
Рис. 4.23. Заглушка для проверки СОМ-портов (LoopBack)
Если тест с внешней заглушкой не проходит, причину следует искать во внешних буферах, их питании или в шлейфах подключения внешних разъемов. Здесь может помочь осциллограф или вольтметр. Последовательность проверки может быть следующей:
1. Проверить наличие двуполярного питания выходных схем передатчиков (этот шаг логически первый, но поскольку он технически самый сложный, его можно отложить на крайний случай, когда появится желание заменить буферные микросхемы).
2. Проверить напряжение на выходах TD, RTS и DTR: после аппаратного сброса на выходе TD должен быть отрицательный потенциал около -12 В (по крайней мере ниже -5 В), а на выходах RTS и DTR – такой же положительный. Если этих потенциалов нет, возможна ошибка подключения разъема к плате через шлейф.
Распространенные варианты:
o шлейф не подключен;
o шлейф подключен неправильно (разъем перевернут или вставлен со смещением);
o раскладка шлейфа не соответствует разъему платы.
Первые два варианта проверяются при внимательном осмотре, третий же может потребовать некоторых усилий. В табл. 4 приведены три варианта раскладки 10-проводного шлейфа разъема СОМ-порта; для СОМ-портов на системных платах возможно существование и других. Теоретически шлейф должен поставляться в соответствии с разъемом платы, на которой расположен порт.
Если дело в ошибочной раскладке, то эти три выходных сигнала удастся обнаружить на других контактах разъемов (на входных контактах потенциал совсем небольшой). Если эти сигналы обнаружить не удалось, очевидно, вышли из строя буферные формирователи.
3. Соединив контакты линий RTS и CTS (или установив заглушку), следует попытаться вывести небольшой файл на СОМ-порт (например, командой COPYC:\AUTOEXEC. BAT СОМ 7;). С исправным портом эта команда успешно выполнится за несколько секунд с сообщением об успешном копировании. При этом потенциалы на выходах RTS и DTR должны измениться на отрицательные, а на выходе TD должна появиться пачка двуполярных импульсов с амплитудой более 5 В. Если потенциалы RTS и DTR не изменились, ошибка в буферных формирователях. Если на выходе RTS (и входе CTS) появился отрицательный потенциал, а команда COPY завершается с ошибкой, скорее всего, вышел из строя приемник линии CTS (или опять-таки ошибка в шлейфе). Если команда COPY успешно проходит, а изменения на выходе TD не обнаруживаются (их можно увидеть стрелочным вольтметром, но оценить амплитуду импульсов не удастся), виноват буферный передатчик сигнала TD.
Замена микросхем приемников и передатчиков существенно облегчается, если они установлены на разъёмах. Перед заменой следует с помощью осциллографа или вольтметра удостовериться в неисправности конкретной микросхемы. Расположение выводов микросхем приведено на рис. 4.24.
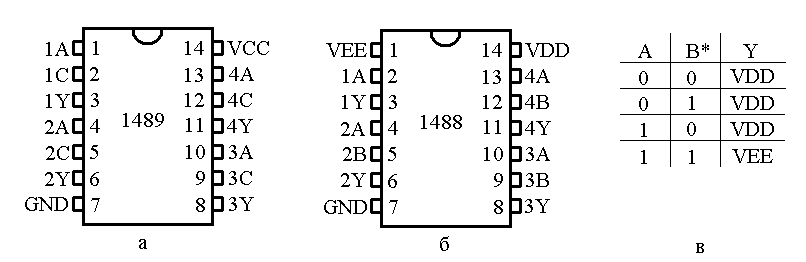
Рис. 4.24. Формирование сигналов RS-232C: а – приемник 1489 (А – вход RS-232, С – управление гистерезисом (ТТЛ), Y – выход ТТЛ); б – передатчик 1488 (А, В – входы ТТЛ, Y – выход RS-232, VDD = +12 В, VEE = -12 В);
в – таблица состояния выходов передатчика (*1В – логическая 1)
Если буферные элементы включены в состав интерфейсной БИС (что теперь весьма распространено), то такой порт ремонту не подлежит (по крайней мере, в обычных условиях). Неисправный СОМ-порт, установленный на системной плате, можно попытаться отключить в BIOS SETUP, но порт мог сгореть и вместе со схемой своего отключения – тогда он останется "живым мертвецом" в карте портов ввода/вывода и прерываний. Иногда он полностью выводит из строя системную плату.
Источниками ошибок могут являться разъемы и кабели. В разъемах встречаются плохие контакты, а кабели кроме возможных обрывов могут иметь плохие частотные характеристики. Частотные свойства кабелей обычно сказываются при большой длине (десятки метров) на высоких скоростях обмена (56 или 115 Кбит/с). При необходимости использования длинных кабелей на высоких скоростях сигнальные провода данных должны быть перевиты с отдельными проводами "схемной земли".
Питание от интерфейса, или Почему может не работать мышь
При подключении к СОМ-порту устройств с небольшим энергопотреблением возникает соблазн использования питания от выходных линий интерфейса. Если линии управления DTR и RTS не используются по прямому назначению, их можно задействовать как питающие с напряжением около 12 В. Ток короткого замыкания на "схемную землю" ограничен буферной микросхемой передатчика на уровне 20 мА. При инициализации порта эти линии переходят в состояние "выключено", то есть вырабатывают положительное напряжение. Линия TD в покое находится в состоянии логической единицы, так что на выходе вырабатывается отрицательное напряжение. Потенциалами линий можно управлять через регистры СОМ-порта (выход TD вырабатывает положительное напряжение, если установить бит BRCON).
Двуполярным питанием от линий интерфейса (+V от DTR и RTS, -V от TD) пользуются все манипуляторы, подключаемые к СОМ-портам. Зная это, в случае неработоспособности мыши с данным портом следует проверить напряжения на соответствующих контактах разъема. Бывает, что с конкретным портом не работает только конкретная мышь (модель или экземпляр), хотя другие мыши с этим портом и эти же мыши с другими портами работают нормально. Здесь дело может быть в уровнях напряжений. Стандарт требует от порта выходного напряжения не менее 5 В (абсолютного значения), и, если данный порт обеспечивает только этот минимум, некоторым мышам не хватит мощности для питания светодиодов (главных потребителей энергии).
Порт получает двуполярное питание через системную плату от блока питания компьютера. Отсутствие на выходе блока питания напряжения +12 В обычно обнаружится по неработоспособности дисков. Отсутствие напряжения -12 В "заметят" только устройства, подключенные к СОМ - портам. Блок питания теоретически контролирует наличие этих напряжений на своем выходе (сообщая о неполадках сигналом Power Good, вызывающим аппаратный сброс). Встречаются упрощенные схемы блоков питания, у которых контролируются не все напряжения. Кроме того, возможны плохие контакты в разъеме подключения питания к системной плате.
Функции BIOS для СОМ-портов
В процессе начального тестирования POST BIOS проверяет наличие последовательных портов (регистров UART 8250 или совместимых) по стандартным адресам и помещает базовые адреса обнаруженных портов в ячейки BIOS Data Area 0:0400, 0402, 0404, 0406. Эти ячейки хранят адреса портов с логическими именами СОМ 1-COM4. Нулевое значение адреса является признаком отсутствия порта с данным номером. В ячейки 0:047С, 047D, 047Е, 047F заносятся константы, задающие тайм-аут для портов.
Обнаруженные порты инициализируются на скорость обмена 2400 бит/с, 7 бит данных с контролем на четность (even), 1 стоп-бит. Управляющие сигналы интерфейса DTR и RTS переводятся в исходное состояние ("выключено" – положительное напряжение).
Порты поддерживаются сервисом BIOS INT 14h, который обеспечивает следующие функции:
· 00h – инициализация (установка скорости обмена и формата посылок, заданных регистром AL; запрет источников прерываний). На сигналы DTR и RTS влияния не оказывает (после аппаратного сброса они пассивны).
· 0lh – вывод символа из регистра AL (без аппаратных прерываний). Активируются сигналы DTR и RTS, и после освобождения регистра THR в него помещается выводимый символ. Если за заданное время регистр не освобождается, фиксируется ошибка тайм-аута и функция завершается.
· 02h – ввод символа (без аппаратных прерываний). Активируется только сигнал DTR (RTS переходит в пассивное состояние), и ожидается готовность принятых данных, принятый символ помещается в регистр AL. Если за заданное время данные не получены, функция завершается с ошибкой тайм-аута.
· 03h – опрос состояния модема и линии (чтение регистров MSR и LSR). Эту гарантированно быструю функцию обычно вызывают перед функциями ввода/вывода во избежание риска ожидания тайм-аута.
При вызове INT 14h номер функции задается в регистре АН, номер порта (0-3) – в регистре DX(0 – СОМ 1, 1 – COM2). При возврате из функций 0,1 и 3 регистр АН содержит байт состояния линии (регистр LSR), AL – байт состояния модема (MSR). При возврате из функции 2 нулевое значение бита 7 регистра АН указывает на наличие принятого символа в регистре AL', ненулевое значение бита 7 – на ошибку приема, которую можно уточнить функцией 3.
Формат байта состояния линии (регистр АН):
· Бит 7 – ошибка тайм-аута (после вызова функции 2 – признак любой ошибки).
· Бит 6 – регистр сдвига передатчика пуст (пауза передачи).
· Бит 5 – промежуточный регистр передатчика пуст (готов принять символ для передачи).
· Бит 4 – обнаружен обрыв линии.
· Бит 3 – ошибка кадра (отсутствие стоп-бита).
· Бит 2 – ошибка паритета принятого символа.
· Бит 1 – переполнение (потеря символа).
· Бит 0 – регистр данных содержит принятый символ.
Формат байта состояния модема (регистр AL):
· Бит 7 – состояние линии DCD.
· Бит 6 – состояние линии RI.
· Бит 5 – состояние линии DSR.
· Бит 4 – состояние линии CTS.
· Бит 3 – изменение состояния DCD.
· Бит 2 – изменение огибающей RI.
· Бит 1 – изменение состояния DSR.
· Бит 0 – изменение состояния CTS.
Формат регистра AL при инициализации:
· Биты [7:5] - скорость обмена:
· 000-110; 010-300; 100-1200; 110-4800,
· 001-150; 011-600; 101-2400; 111-9600 бит/с.
· Биты [4:3] - контроль паритета:
· 01 - число единиц нечетное,
o 11 -четное,
o 00 и 10 - без контроля.
· Бит 2 - количество стоп-бит:
o 0-1 бит,
o 1-2 бита (на скорости 110 бит/с - 1,5 стоп-бита).
· Биты [1:0] - длина посылки:
o 00-5 бит,
o 01-6 бит,
o 10-7 бит,
o 11-8 бит.
СОМ-порт и РnР
Современные ПУ, подключаемые к СОМ-порту, могут поддерживать спецификацию РnР. Основная задача ОС заключается в идентификации подключенного устройства, для чего разработан несложный протокол, реализуемый на любых СОМ-портах чисто программным способом (рис. 4.25):

Рис. 4.25. Запрос идентификатора устройства РnР
1. Порт инициализируется с состоянием линий DTR=OA/, RTS=OFF, TXD=Mark – состояние покоя (Idle).
2. Некоторое время (0,2 с) ожидается появление сигнала DSR, которое указало бы на наличие устройства, подключенного к порту. В простейшем случае устройство имеет на разъеме перемычку DTR-DSR, обеспечивающую указанный ответ. Если устройство обнаружено, выполняются манипуляции управляющими сигналами DTR и RTS для получения информации от устройства. Если ответ не получен, ОС, поддерживающая динамическое реконфигурирование, периодически опрашивает состояние порта для обнаружения новых устройств.
3. Порт программируется на режим 1200 бит/с, 7 бит данных, без паритета, 1 стоп-бит, и на 0,2 с снимается сигнал DTR. После этого устанавливается DTR=1, а еще через 0,2 с устанавливается и RTS=1.
4. В течение 0,2 с ожидается приход первого символа от устройства. По приходе символа начинается прием идентификатора (см. ниже). Если за это время символ не пришел (рис. 4.25), выполняется вторая попытка опроса (см. п. 5), несколько отличающаяся от первой.
5. На 0,2 с снимаются оба сигнала (DTR=0 и RTS=0), после чего они оба устанавливаются (DTR=1 и RTS=1).
6. В течение 0,2 с ожидается приход первого символа от устройства, по приходе символа начинается прием идентификатора (см. ниже). Если за это время символ не пришел, то в зависимости от состояния сигнала DSR переходят к проверке отключения Verify Disconnect (при DSR^O) или в дежурное состояние Connect Idle (при DSR=1).
7. В дежурном состоянии Connect Idle устанавливается DTR=1, RTS=0, порт программируется на режим 300 бит/с, 7 бит данных, без паритета, 1 стоп-бит. Если в этом состоянии обнаружится DSR=0, ОС следует уведомить об отключении устройства.
Посимвольный прием идентификатора устройства имеет ограничения по тайм-ауту в 0,2 с на символ, а также общее ограничение в 2,2 с, позволяющее принять строку длиной до 256 символов. Строка идентификатора РnР должна иметь маркеры начала (28h или 08h) и конца (29h или 09h), между которыми располагается тело идентификатора в стандартизованном формате. Перед маркером начала может находиться до 16 символов, не относящихся к идентификатору РnР. Если за первые 0,2 с ожидания символа (шаг 4 или 6) маркер начала не пришел, или же сработал тайм-аут, а маркер конца не получен, или же какой-либо символ принят с ошибкой, происходит переход в состояние Connect Idle. Если получена корректная строка идентификатора, она передается ОС.
Для проверки отключения (Verify Disconnect) устанавливается DTR=1, RTS=0 и через 5 с проверяется состояние сигнала DSR. При DSR=1 происходит переход в состояние Connect Idle (см. п. 7), при DSR=0 происходит переход в состояние Disconnect Idle, в котором система может периодически опрашивать сигнал DSR для обнаружения подключения устройства.
Описанный механизм разрабатывался фирмой Microsoft с учетом совместимости с не-РnР-устройствами – невозможность их вывода из строя и устойчивость системы к сообщениям, не являющимся РnР- идентификаторами. Например, обычная Microsoft Mouse при включении питания от интерфейса ответит ASCII-символом "М" (трехкнопочная – строкой "МЗ").
Последовательная шина USB
Последовательная шина USB (Universal Serial Bus – универсальная последовательная шина) компьютерным меркам довольно давно – версия первого утвержденного варианта стандарта появилась 15 января 1996 года. Разработка стандарта была инициирована весьма авторитетными фирмами – Intel, DEC, IBM, NEC, Northen Telecom и Compaq.
Основная цель стандарта, поставленная перед его разработчиками – создать реальную возможность пользователям работать в режиме Plug&Play с периферийными устройствами. Это означает, что должно быть предусмотрено подключение устройства к работающему компьютеру, автоматическое распознавание его немедленно после подключения и последующей установки соответствующих драйверов. Кроме этого, желательно питание маломощных устройств подавать с самой шины. Скорость шины должна быть достаточной для подавляющего большинства периферийных устройств. Попутно решается историческая проблема нехватки ресурсов на внутренних шинах IBM PC совместимого компьютера – контроллер USB занимает только одно прерывание независимо от количества подключенных к шине устройств.
Возможности последовательной шины USB следуют из ее технических характеристик:
Высокая скорость обмена (full-speed signaling bit rate) – 12 Mb/s
Максимальная длина кабеля для высокой скорости обмена – 5 m
Низкая скорость обмена (low-speed signaling bit rate) – 1.5 Mb/s
Максимальная длина кабеля для низкой скорости обмена – 3 m
Максимальное количество подключенных устройств (включая размножители) – 127.
Возможно подключение устройств с различными скоростями обмена
Отсутствие необходимости в установке пользователем дополнительных элементов, таких как терминаторы для SCSI
Напряжение питания для периферийных устройств – 5 V
Максимальный ток потребления на одно устройство – 500 mA.
Поэтому целесообразно подключать к USB практически любые периферийные устройства, кроме цифровых видеокамер и высокоскоростных жестких дисков. Конструкция разъемов для USB рассчитана на многократное сочленение/расчленение.
Возможность использования только двух скоростей обмена данными ограничивает применяемость шины, но существенно уменьшает количество линий интерфейса и упрощает аппаратную реализацию.
Питание непосредственно от USB возможно только для устройств с малым потреблением, таких как клавиатуры, мыши, джойстики и т.п.
Сигналы USB передаются по 4-х проводному кабелю.
Кабель для поддержки полной скорости шины (full-speed) выполняется как витая пара, защищается экраном и может также использоваться для работы в режиме минимальной скорости (low-speed). Кабель для работы только на минимальной скорости (например, для подключения мыши) может быть любым и неэкранированным.
Система USB разделяется на три уровня с определенными правилами взаимодействия. Устройство USB содержит интерфейсную часть, часть устройства и функциональную часть. Хост тоже делится на три части – интерфейсную, системную и ПО устройства. Каждая часть отвечает только за определенный круг задач, логическое и реальное взаимодействие между ними иллюстрирует рис. 4.26.
В рассматриваемую структуру входят следующие элементы:
Физическое устройство USB – устройство на шине, выполняющее функции, интересующие конечного пользователя.
Client SW – ПО, соответствующее конкретному устройству, исполняемое на хост–компьютере. Может являться составной частью ОС или специальным продуктом.
USB System SW – системная поддержка USB, независимая от конкретных устройств и клиентского ПО.
USB Host Controller – аппаратные и программные средства для подключения устройств USB к хост–компьютеру.
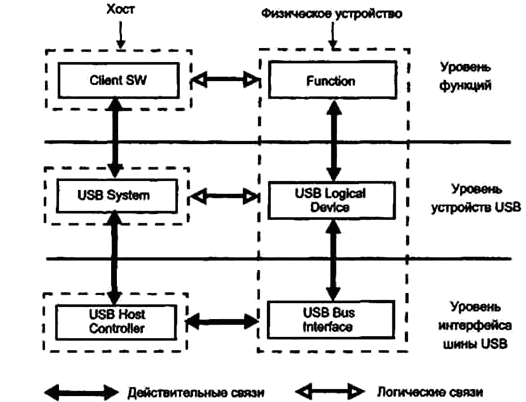
Рис. 4.26. Взаимодействие компонентов USB
Физический интерфейс
Информационные сигналы и питающее напряжение 5В передаются по четырехпроводному кабелю. Используется дифференциальный способ передачи сигналов D+ и D– по двум проводам. Уровни сигналов передатчиков в статическом режиме должны быть ниже 0,3 В (низкий уровень) или выше 2,8 В (высокий уровень). Приемники выдерживают входное напряжение в пределах – 0,5...+3,8 В. Передатчики должны уметь переходить в высокоимпедансное состояние для двунаправленной полудуплексной передачи по одной паре проводов.
Передача по двум проводам в USB не ограничивается дифференциальными сигналами. Кроме дифференциального приемника каждое устройство имеет линейные приемники сигналов D+ и D–, а передатчики этих линий управляются индивидуально. Это позволяет различать более двух состояний линии, используемых для организации аппаратного интерфейса. Состояния DiffO и Diff1 определяются по разности потенциалов на линиях D+ и D – более 200 мВ при условии, что на одной из них потенциал выше порога срабатывания VSE. Состояние, при котором на обоих входах D+ и D– присутствует низкий уровень, называется линейным ну– лем (SEO – Single–Ended Zero). интерфейс определяет следующие состояния:
DataJ State и Data К State – состояния передаваемого бита (или просто J и К), определяются через состояния DiffO и Diff1.
Idle State – пауза на шине.
Resume State – сигнал "пробуждения" для вывода устройства из "спящего" режима.
Start of Packet (SOP) – начало пакета (переход из Idle State в К).
End of Packet (EOP) – конец пакета.
Disconnect – устройство отключено от порта.
Connect – устройство подключено к порту.
Reset – сброс устройства.
Состояния определяются сочетаниями дифференциальных и линейных сигналов; для полной и низкой скоростей состояния DiffO и Diff1 имеют противоположное назначение. В декодировании состояний Disconnect, Connect и Reset учитывается время нахождения линий (более 2,5 мс) в определенных состояниях.
Шина имеет два режима передачи. Полная скорость передачи сигналов USB составляет 12 Мбит/с, низкая – 1,5 Мбит/с. Для полной скорости используется экранированная витая пара с импедансом 90 Ом и длиной сегмента до 5 м, для низкой –невитой неэкранированньгй кабель до 3 м.
Сигналы синхронизации кодируются вместе с данными по методу NRZI (Non Return to Zero Invert), его работу иллюстрирует рис. 4.29. Каждому пакету предшествует поле синхронизации SYNC, позволяющее приемнику настроиться на частоту передатчика.
Кабель также имеет линии VBus и GND для передачи питающего напряжения 5 В к устройствам. Сечение проводников выбирается в соответствии с длиной сегмента для обеспечения гарантированного уровня сигнала и питающего напряжения.
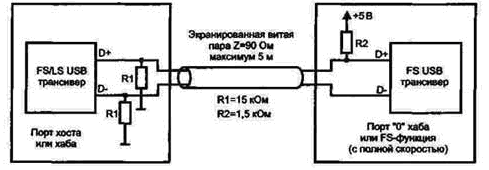
Рис. 4.27. Подключение полноскоростного устройства

Рисунок 4.28 Подключение низкоскоростного устройства

Рис. 4.29. Кодирование данных по методу NRZI
Стандарт определяет два типа разъемов (табл. 7 и рис. 4.29).
| Контакт | Цепь | Контакт | Цепь |
| VBus | D+ | ||
| D– | GND |
Таблица 7
Разъемы типа "А" применяются для подключения к хабам (Upstream Connector). Вилки устанавливаются на кабелях, не отсоединяемых от устройств (например, клавиатура, мышь и т. п.). Гнезда устанавливаются на нисходящих портах (Downstream Port) хабов.
Разъемы типа "В" (Downstream Connector) устанавливаются на устройствах, от которых соединительный кабель может отсоединяться (принтеры и сканеры). Ответная часть (вилка) устанавливается на соединительном кабеле, противоположный конец которого имеет вилку типа "А".
Разъемы типов "А" и "В" различаются механически (рис. 4.30а, б), что исключает недопустимые петлевые соединения портов хабов. Четырехконтактные разъемы имеют ключи, исключающие неправильное присоединение. Конструкция разъемов обеспечивает позднее соединение и раннее отсоединение сигнальных цепей по сравнению с питающими. Для распознавания разъема USB на корпусе устройства ставится стандартное символическое обозначение.

Рис. 4.30. Гнезда USB: а – типа "А", б – типа "В", в – символическое
обозначение
Модель передачи данных
Каждое устройство USB представляет собой набор независимых конечных точек (Endpoint), с которыми хост–контроллер обменивается информацией. Конечные точки описываются следующими параметрами:
требуемой частотой доступа к шине и допустимыми задержками обслуживания;
требуемой полосой пропускания канала;
номером точки;
требованиями к обработке ошибок;
максимальными размерами передаваемых и принимаемых пакетов;
типом обмена;
направлением обмена (для сплошного и изохронного обменов).
Каждое устройство обязательно имеет конечную точку с номером 0, используемую для инициализации, общего управления и опроса его состояния. Эта точка всегда сконфигурирована при включении питания и подключении устройства к шине. Оно поддерживает передачи типа "управление".
Кроме нулевой точки, устройства–функции могут иметь дополнительные точки, реализующие полезный обмен данными. Низкоскоростные устройства могут иметь до двух дополнительных точек, полноскоростные – до 16 точек ввода и 16 точек вывода (протокольное ограничение). Точки не могут быть использованы до их конфигурирования (установления согласованного с ними канала).
Каналом (Pipe) в USB называется модель передачи данных между хост–контроллером и конечной точкой (Endpoint) устройства. Имеются два типа каналов: потоки (Stream) и сообщения (Message). Поток доставляет данные от одного конца канала к другому, он всегда однонаправленный. Один и тот же номер конечной точки может использоваться для двух поточных каналов – ввода и вывода. Поток может реализовывать следующие типы обмена: сплошной, изохронный и прерывания. Доставка всегда идет в порядке "первым вошел – первым вышел" (FIFO); с точки зрения USB, данные потока неструктурированны. Сообщения имеют формат, определенный спецификацией USB. Хост посылает запрос к конечной точке, после которого передается (принимается) пакет сообщения, за которым следует пакет с информацией состояния конечной точки. Последующее сообщение нормально не может быть послано до обработки предыдущего, но при отработке ошибок возможен сброс необслуженных сообщений. Двухсторонний обмен сообщениями адресуется к одной и той же конечной точке. Для доставки сообщений используется только обмен типа "управление".
С каналами связаны характеристики, соответствующие конечной точке (полоса пропускания, тип сервиса, размер буфера и т. п.). Каналы организуются при конфигурировании устройств USB. Для каждого включенного устройства существует канал сообщений (Control Pipe 0), по которому передается информация конфигурирования, управления и состояния.
Типы передачи данных
USB поддерживает как однонаправленные, так и двунаправленные режимы связи. Передача данных производится между ПО хоста и конечной точкой устройства. Устройство может иметь несколько конечных точек, связь с каждой из них (канал) устанавливается независимо.
Архитектура USB допускает четыре базовых типа передачи данных:
Управляющие посылки (Control Transfers), используемые для конфигурирования во время подключения и в процессе работы для управления устройствами. Протокол обеспечивает гарантированную доставку данных. Длина поля данных управляющей посылки не превышает 64 байт на полной скорости и 8 байт – на низкой.
Сплошные передачи (Bulk Data Transfers) сравнительно больших пакетов без жестких требований ко времени доставки. Передачи занимают всю свободную полосу пропускания шины. Пакеты имеют поле данных размером 8, 16, 32 или 64 байт. Приоритет этих передач самый низкий, они могут приостанавливаться при большой загрузке шины. Допускаются только на полной скорости передачи.
Прерывания (Interrupt) – короткие (до 64 байт на полной скорости, до 8 байт на низкой) передачи типа вводимых символов или координат. Прерывания имеют спонтанный характер и должны обслуживаться не медленнее, чем того требует устройство. Предел времени обслуживания устанавливается в диапазоне 1–255 мс для полной скорости и 10–255 мс – для низкой.
Изохронные передачи (Isochronous Transfers) – непрерывные передачи в реальном времени, занимающие предварительно согласованную часть пропускной способности шины и имеющие заданную задержку доставки. В случае обнаружения ошибки изохронные данные передаются без повтора – недействительные пакеты игнорируются. Пример – цифровая передача голоса. Пропускная способность определяется требованиями к качеству передачи, а задержка доставки может быть критичной, например, при реализации телеконференций.
Полоса пропускания шины делится между всеми установленными каналами. Выделенная полоса закрепляется за каналом, и если установление нового канала требует такой полосы, которая не вписывается в уже существующее распределение, запрос на выделение канала отвергается.
Архитектура USВ предусматривает внутреннюю буферизацию всех устройств, причем чем большей полосы пропускания требует устройство, тем больше должен быть его буфер. USB должна обеспечивать обмен с такой скоростью, чтобы задержка данных в устройстве, вызванная буферизацией, не превышала нескольких миллисекунд.
Изохронные передачи классифицируются по способу синхронизации конечных точек – источников или получателей данных – с системой: различают асинхронный, синхронный и адаптивный классы устройств, каждому из которых соответствует свой тип канала USB.
Протокол
Все обмены (транзакции) по USB состоят из трех пакетов. Каждая транзакция планируется и начинается по инициативе контроллера, который посылает пакет–маркер (Token Packet). Он описывает тип и направление передачи, адрес устройства USB и номер конечной точки. В каждой транзакции возможен обмен только между адресуемым устройством (его конечной точкой) и хостом. Адресуемое маркером устройство распознает свой адрес и готовится к обмену. Источник данных (определенный маркером) передает пакет данных (или уведомление об отсутствии данных, предназначенных для передачи). После успешного приема пакета приемник данных посылает пакет подтверждения (Handshake Packet).
Планирование транзакций обеспечивает управление поточными каналами. На аппаратном уровне использование отказа от транзакции (NAck) при недопустимой интенсивности передачи предохраняет буферы от переполнения сверху и снизу. Маркеры отвергнутых транзакций повторно передаются в свободное для шины время. Управление потоками позволяет гибко планировать обслуживание одновременных разнородных потоков данных.
Устойчивость к ошибкам обеспечивают следующие свойства USB:
Высокое качество сигналов, достигаемое благодаря дифференциальным приемникам/передатчикам и экранированным кабелям.
Защита полей управления и данных CRC–кодами.
Обнаружение подключения и отключения устройств и конфигурирование ресурсов на системном уровне.
Самовосстановление протокола с тайм-аутом при потере пакетов.
Управление потоком для обеспечения изохронности и управления аппаратными буферами.
Независимость функций от неудачных обменов с другими функциями.
Для обнаружения ошибок передачи каждый пакет имеет контрольные поля CRC–кодов, позволяющие обнаруживать все одиночные и двойные битовые ошибки. Аппаратные средства обнаруживают ошибки передачи, а контроллер автоматически производит трехкратную попытку передачи. Если повторы безуспешны, сообщение об ошибке передается клиентскому ПО.
Форматы пакетов
Байты передаются по шине последовательно, начиная с младшего бита. Все посылки организованы в пакеты. Каждый пакет начинается с поля синхронизации Sync, которое представляется последовательностью состояний KJKJKJKK (кодированную по NRZI), следующую после состояния Idle. Последние два бита (КК) являются маркером начала пакета SOP, используемым для идентификации первого бита идентификатора пакета PID. Идентификатор пакета является 4–битным полем PID[3:0], идентифицирующим тип пакета (табл. 8), за которым в качестве контрольных следуют те же 4 бита, но инвертированные.
В пакетах–маркерах IN, SETUP и OUT следующими являются адресные поля: 7–битный адрес функции и 4–битный адрес конечной точки. Они позволяют адресовать до 127 функций USB (нулевой адрес используется для конфигурирования) и по 16 конечных
|
|
|

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

