| Выполнить действие, предписанное командой
|
Исполняя команду за командой программы, процессор выполняет циклические действия. В общем виде командный цикл можно проиллюстрировать следующей диаграммой.
Рис. 4.1. Диаграмма командного цикла
Как видим, цикл любой команды содержит хотя бы один машинный цикл, это цикл извлечения команды из памяти (Fetch). Если команда требует операнд, то она будет содержать еще один машинный цикл – цикл чтения памяти (MEMR - Memory Read).
Если результат команды должен быть сохранен в памяти, то потребуется цикл записи в память (MEMW – Memory Write). Команды, выполняющие ввод или вывод данных из/на УВВ, будут содержать циклы ввода (IOR – Input/Output Read) или циклы вывода (IOW – Input/Output Write).
Принцип 3М (микропрограммируемость, модульность, магистральность). Микропрограммируемость (принцип микропрограммного управления)
Реализация той или иной фазы команды требует определенного количества тактов. Устройство управления в каждом такте подает на остальные узлы процессора и другие блоки ЭВМ сигналы управления (микроинструкции), предписывающие им выполнить в этом такте те или иные действия, либо остаться в том же состоянии. Каждую микроинструкцию можно закодировать двоичным кодом. В простейшем случае этот код может состоять из одного бита и соответствовать активному («1») или не активному («0») значению сигнала. Например, принять («защелкнуть») данные в регистр. Для управления более сложными узлами может понадобиться одновременно подать несколько сигналов. В этом случае микроинструкция должна содержать несколько бит.
Если все микроинструкции, действующие в одном такте, разместить в определенном порядке, то получим многоразрядную двоичную комбинацию, называемую микрокомандой.
Последовательность микрокоманд, такт за тактом реализующая определенную фазу командного цикла (машинный цикл), называют микропрограммой (mP). Таким образом, реализуя ту или иную команду, которую теперь логично назвать “внешней”, процессор выполняет определенный набор внутренних микропрограмм (mP1,…, mPm). Этот принцип иллюстрирует рис. 4.2.
Рассмотренный принцип управления процессором получил название принципа микропрограммного управления.
Согласно этому принципу все множество микропрограмм размещают внутри самого процессора в так называемой микропрограммной памяти (МПП), выполненной по технологии постоянной памяти (ПЗУ микропрограмм).
Теперь устройству управления процессора для реализации той или иной фазы команды достаточно отработать соответствующую микропрограмму, т.е. последовательно, такт за тактом извлекать из микропрограммной памяти микрокоманды, преобразовывать их в наборы сигналов, которые по соответствующим линиям связи будут поданы на нужные узлы.
| Такт 1
| Микрокоманда 1 000101101011010111101 … 0
| Микро-программа 1 – FETCH (mP1)
| Команда
|
| Такт 2
| Микрокоманда 2 100111001001010100101 … 0
|
| Такт 3
| Микрокоманда 2 110111001001010100101 … 1
|
| Такт 4
| Микрокоманда 4 100111001010110100101 … 0
| (mP2)
|
| Такт 5
| Микрокоманда 5 100111001001010100101 … 1
|
| ...
|
| ...
|
| Такт n-2
| Микрокоманда n-2
| (mPm)
|
| Такт n-1
| Микрокоманда n-1
|
| Такт n
| Микрокоманда n
|
Рис. 4.2. Микропрограмма состоит из нескольких микрокоманд
Реализация такого принципа приводит к обобщенной структуре процессора, показанной на рис. 4.3.
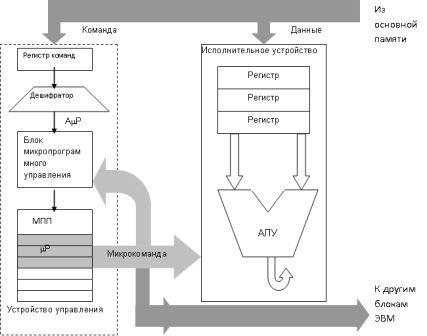
Рис. 4.3. Обобщенная структура процессора
Форматы передачи данных
Рассмотрим некоторые общие вопросы, связанные с обменом данными между ВУ и микроЭВМ. Существуют два способа передачи слов информации по линиям данных: параллельный, когда одновременно пересылаются все биты слова, и последовательный, когда биты слова пересылаются поочередно, начиная, например, с его младшего разряда.
Так как между отдельными проводниками шины для параллельной передачи данных существует электрическая емкость, то при изменении сигнала, передаваемого по одному из проводников, возникает помеха (короткий выброс напряжения) на других проводниках. С увеличением длины шины (увеличением емкости проводников) помехи возрастают и могут восприниматься приемником как сигналы. Поэтому рабочее расстояние для шины параллельной передачи данных ограничивается длиной 1-2 м, и только за счет существенного удорожания шины или снижения скорости передачи длину шины можно увеличить до 10-20 м.
Указанное обстоятельство и желание использовать для дистанционной передачи информации телеграфные и телефонные линии обусловили широкое распространение способа последовательного обмена данными между ВУ и микроЭВМ и между несколькими микроЭВМ. Возможны два режима последовательной передачи данных: синхронный и асинхронный.
При синхронной последовательной передаче каждый передаваемый бит данных сопровождается импульсом синхронизации, информирующим приемник о наличии на линии информационного бита. Следовательно, между передатчиком и приемником должны быть протянуты минимум три провода: два для передачи импульсов синхронизации и бит данных, а также общий заземленный проводник. Если же передатчик (например, микроЭВМ) и приемник (например, дисплей) разнесены на несколько метров, то каждый из сигналов (информационный и синхронизирующий) придется посылать либо по экранированному (телевизионному) кабелю, либо с помощью витой пары проводов, один из которых заземлен или передает сигнал, инверсный основному.
Синхронная последовательная передача начинается с пересылки в приемник одного или двух символов синхронизации (не путать с импульсами синхронизации). Получив такой символ (символы), приемник начинает прием данных и их преобразование в параллельный формат. Естественно, что при такой организации синхронной последовательной передачи она целесообразна лишь для пересылки массивов слов, а не отдельных символов.
Асинхронная последовательная передача данных означает, что у передатчика и приемника нет общего генератора синхроимпульсов и что синхронизирующий сигнал не посылается вместе с данными. Как же в таком случае приемник будет узнавать о моментах начала и завершения передачи бит данных. Опишем простую процедуру, которую можно использовать, если передатчик и приемник асинхронной последовательной передачи данных согласованы по формату и скорости передачи.
Стандартный формат асинхронной последовательной передачи данных, используемый в ЭВМ и ВУ, содержит n пересылаемых бит информации (при пересылке символов n равно 7 или 8 битам) и 3-4 дополнительных бита: стартовый бит, бит контроля четности (или нечетности) и 1 или 2 стоповых бита (рис. 4.4, а). Бит четности (или нечетности) может отсутствовать. Когда передатчик бездействует (данные не посылаются на линию), на линии сохраняется уровень сигнала, соответствующий логической 1.
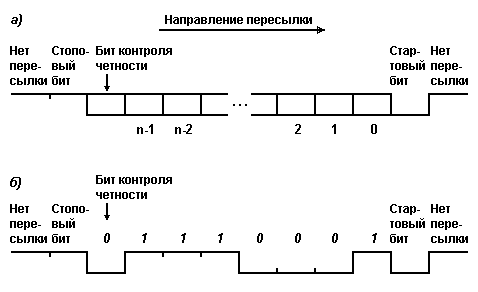
Рис. 4.4. Формат асинхронной последовательной передачи данных
Передатчик может начать пересылку символа в любой момент времени посредством генерирования стартового бита, т. е. перевода линии в состояние логического 0 на время, точно равное времени передачи бита. Затем происходит передача битов символа, начиная с младшего значащего бита, за которым следует дополнительный бит контроля по четности или нечетности. Далее с помощью стопового бита линия переводится в состояние логической 1 (рис. 4.4, б). При единичном бите контроля стоповый бит не изменяет состояния сигнала на линии. Состояние логической 1 должно поддерживаться в течение промежутка времени, равного 1 или 2 временам передачи бита.
Промежуток времени от начала стартового бита до конца стопового бита (стоповых бит) называется кадром. Сразу после стоповых бит передатчик может посылать новый стартовый бит, если имеется другой символ для передачи; в противном случае уровень логической 1 может сохраняться на протяжении всего времени, пока бездействует передатчик. Новый стартовый бит может быть послан в любой момент времени после окончания стопового бита, например, через промежуток времени, равный 0.43 или 1.5 времени передачи бита.
В линиях последовательной передачи данных передатчик и приемник должны быть согласованы по всем параметрам формата, изображенного на рис. 8, включая номинальное время передачи бита. Для этого в приемнике устанавливается генератор синхроимпульсов, частота которого должна совпадать с частотой аналогичного генератора передатчика. Кроме того, для обеспечения оптимальной защищенности сигнала от искажения, шумов и разброса частоты синхроимпульсов приемник должен считывать принимаемый бит в середине его длительности. Рассмотрим работу приемника с того момента, когда он закончил прием символа данных и перешел в режим обнаружения стартового бита следующего слова.
Если линия перешла в состояние логического нуля и находится в этом состоянии в течение времени, не меньшего половины временного интервала передачи бита, то приемник переводится в режим считывания бит информации. В противном случае приемник остается в режиме обнаружения, так как вероятнее всего это был не стартовый бит, а шумовая помеха. В новом режиме приемник вырабатывает сигналы считывания через интервалы, равные времени передачи бита, т. е. выполняет считывание и сохранение принимаемых бит примерно на середине их передачи. Аналогичным образом будут считаны бит контроля четности и сигнал логической единицы (стоповый бит). Если оказалось, что на месте стопового бита, обнаружен сигнал логического нуля, то произошла "Ошибка кадра" и символ принят неправильно. Иначе проверяется, четно ли общее число единиц в информационных битах и бите контроля, и если оно четно, производится запись принятого символа в буфер приемника.
Передний фронт стартового бита сигнализирует о начале поступления передаваемой информации, а момент его появления служит точкой отсчета времени для считывания бит данных. Стоповый бит предоставляет время для записи принятого символа в буфер приемника и обеспечивает возможность выявления ошибки кадра. Наиболее часто ошибки кадра появляются тогда, когда приемник ошибочно синхронизирован с битом 0, который в действительности не является стартовым битом. Если передатчик бездействует (посылает сигнал логической единицы) в течение одного кадра или более, то всегда можно восстановить правильную синхронизацию. Хуже обстоит дело при рассинхронизации генераторов передатчика и приемника, когда временной интервал между сигналами считывания принимаемых битов будет меньше или больше времени передачи бита.
Например, если при считывании битов посылки, показанной на рис. 51, б, временной интервал между сигналами считывания станет на 6 % меньше, чем время передачи бита, то восьмой и девятый сигналы считывания будут выработаны тогда, когда на линии находится бит контроля четности (рис. 52). Следовательно, не будет обнаружен стоповый бит и будет зафиксирована ошибка кадра, несмотря на правильность принятой информации. Однако при 18 %-й рассинхронизации генераторов, когда вместо кода (01110001) приемник зафиксирует код (11100001), никаких ошибок не будет обнаружено – четность соблюдена и стоповый (девятый по порядку) бит равен 1 (см. рис. 4.5).

Рис. 4.5. Ошибка из-за рассинхронизации генераторов передатчика
и приемника
Режимы адресации
Для взаимодействия с различными модулями в ЭВМ должны быть средства идентификации ячеек внешней памяти, ячеек внутренней памяти, регистров МП и регистров устройств ввода/вывода. Поэтому каждой из запоминающих ячеек присваивается адрес, т.е. однозначная комбинация бит. Количество бит определяет число идентифицируемых ячеек. Обычно ЭВМ имеет различные адресные пространства памяти и регистров МП, а иногда – отдельные адресные пространства регистров устройств ввода/вывода и внутренней памяти. Кроме того, память хранит как данные, так и команды. Поэтому для ЭВМ разработано множество способов обращения к памяти, называемых режимами адресации.
Режим адресации памяти – это процедура или схема преобразования адресной информации об операнде в его исполнительный адрес.
Все способы адресации памяти можно разделить на:
1) прямой, когда исполнительный адрес берется непосредственно из команды или вычисляется с использованием значения, указанного в команде, и содержимого какого-либо регистра (прямая адресация, регистровая, базовая, индексная и т.д.);
2) косвенный, который предполагает, что в команде содержится значение косвенного адреса, т.е. адреса ячейки памяти, в которой находится окончательный исполнительный адрес (косвенная адресация).
В каждой микроЭВМ реализованы только некоторые режимы адресации, использование которых, как правило, определяется архитектурой МП.
Дополнительные режимы адресации
Режимы адресации 32-разрядных процессоров разработаны, исходя из требований образования 32-битового смещения. Другими словами, они предназначены для 32-разрядных приложений, в которых сегменты данных или стека (как, впрочем, и сегменты команд) могут иметь размеры до 232 = 4 Гбайт. Однако в реальном режиме размер любого сегмента ограничивается величиной 216 = 64 Кбайт, и 32-битовые смещения не имеют смысла. С другой стороны, ничто не мешает нам использовать для образования 16-битового смещения 32-разрядные регистры (ЕВХ, ESI и проч.), если, конечно, их реальное содержимое не будет превышать величины FFFFh. Указание в качестве операндов команд 32-разрядных регистров позволяет использовать дополнительные возможности 32-разрядных процессоров по части адресации памяти, что в некоторых случаях может оказаться полезным. Следует подчеркнуть, что речь идет здесь только о тех операндах, или, правильнее сказать, аргументах команды, которые описывают косвенную (через регистры) адресацию памяти.
В отличие от МП86, где базовыми регистрами могут быть только ВХ и ВР, а индексными только SI и DI, 32-разрядные процессоры допускают использование в качестве и базовых, и индексных практически всех регистров общего назначения. Таким образом, вполне законна команда вида
mov ЕАХ,[ЕСХ][EDX]
Второе отличие заключается в возможности масштабирования содержимого индексного регистра, т.е. умножения его на заданный в команде коэффициент, который может принимать значения 1, 2, 4 или 8. Пример такой адресации:
inc word ptr [ЕАХ] [ЕСХ*2]
Еще раз подчеркнем, что дополнительные режимы косвенной адресации требуют использования 32-разрядных регистров. Команды
inc word ptr [AX] [ECX*2] или inc word ptr [ЕАХ] [СХ*2]
рассматриваются ассемблером, как неправильные.
Режимы косвенной адресации памяти, предоставляемые 32-разрядными процессорами при использовании 32-разрядных регистров, изображены на рис. 4.6.
Из рисунка видно, что в качестве базового можно использовать все регистры общего назначения, включая даже указатель стека ESP. При этом, если в качестве базового выступает один из регистров ESP или ЕВР, то по умолчанию адресация осуществляется через сегментный регистр SS, хотя возможна замена сегмента. Во всех остальных случаях адресация по умолчанию осуществляется через сегментный регистр DS. Использование регистра ЕВР в качестве индексного не адресует нас к стеку: адресация по-прежнему осуществляется с помощью регистра DS.
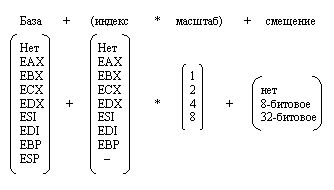
Рис. 4.6. Режимы косвенной адресации с использованием 32-разрядных регистров
Прочерк во второй колонке подчеркивает, что регистр ESP нельзя использовать в качестве индексного. Это не означает, что ESP нельзя указывать в качестве второго операнда:
mov ЕАХ,[ЕСХ][ESP]
Недопустима только конструкция, в которой содержимое ESP умножается на масштабирующий множитель:
mov ЕАХ,[ЕСХ][ESP*8]
Полезно также отметить, что смещение в команде вида
mov ЕАХ,[ЕВХ][ЕСХ]+20
может быть только или 8-битовым, или 32-битовым. 16-битовые смещения не образуются. Если указанная в команде величина смещения помещается в байт, как это имеет место в приведенном выше примере команды, то смещение в коде команды занимает 1 байт. Если же величина смещения больше 255, то под него в коде команды отводится сразу 32 бит.
Таким образом, понятия базовой и индексной адресации в 32-разрядных процессорах несколько размываются. Если регистр указывается с масштабирующим множителем, то это, конечно, индексная адресация. Если же множитель отсутствует, то адресацию и через ЕВХ, и через ESI с равным успехом можно отнести как к базовой, так и к индексной.
Использование для адресации памяти 16-разрядных регистров резко сужает возможности адресации 32-разрядных процессоров (рис. 4.7). В этом случае мы фактически имеем дело с МП 86.

Рис. 4.7. Режимы косвенной адресации с использованием 16-разрядных регистров
Напомним, что в 16-разрядном режиме допустимы не все сочетания базовых и индексных регистров. В качестве базового регистра можно использовать только ВХ или ВР, а в качестве индексного только SI или DI.
Использование средств 32-разрядных процессоров в программировании
При разработке 16-разрядных программ реального режима, предназначенных для выполнения под управлением операционной системы MS-DOS, вполне допустимо использование ряда дополнительных возможностей 32-разрядных процессоров. В реальном режиме можно использовать:
· 32-разрядные операнды; дополнительные команды и расширенные возможности команд МП 86;
· дополнительные режимы адресации;
· четыре сегментных регистра для адресации данных вместо двух.
Для того чтобы транслятор распознавал все эти средства, необходимо начать программу с директивы.586 (или, при желании,.486 или.386) и указать при этом для сегментов команд и данных описатель use 16, чтобы программа осталась 16-разрядной.
Следует заметить, что возможности использования в программах реального режима дополнительных средств 32-разрядных процессоров, хотя и кажутся привлекательными, в действительности весьма ограничены. Новых команд не так уж много, и они не имеют принципиального характера; 32-разрядные данные используются в прикладных программах относительно редко (если не касаться вычислительных программ, содержащих действительные числа, но такие программы редко пишут на языке ассемблера); расширенные возможности адресации в полной мере проявляются лишь в 32-разрядных программах, не работающих в DOS. Тем не менее, в каких-то случаях привлечение средств 32-разрядных процессоров может оказаться полезным и в 16-разрядных программах.
Среди системных данных DOS и BIOS есть данные, требующие для своего размещения 2 слов. К таким данным, в частности, относится системное время, накапливаемое в 4х-байтовой ячейке с абсолютным адресом 46Ch. В процессе начальной загрузки компьютера в ячейку с адресом 46Ch переносится из часов реального времени время, истекшее от начала суток, а затем содержимое этой ячейки увеличивается на 1 каждым прерыванием от системного таймера, подключенного к вектору 8. Чтение ячейки 46Ch позволяет определить текущее время с погрешностью приблизительно в 1/18 секунды, что позволяет достаточно точно измерять интервалы времени. Арифметические действия с системным временем удобно выполнять в расширенных 32-разрядных регистрах.
Система команд
Проектирование системы команд оказывает влияние на структуру ЭВМ. Оптимальную систему команд иногда определяют как совокупность команд, которая удовлетворяет требованиям проблемно-ориентированных применений таким образом, что избыточность аппаратных и аппаратно-программных средств на реализацию редко используемых команд оказывается минимальной. В различных программах ЭВМ частота появления команд различна; например, по данным фирмы DEC в программах для ЭВМ семейства PDP-11 наиболее часто встречается команда передачи MOV(B), на ее долю приходится приблизительно 32 % всех команд в типичных программах. Систему команд следует выбирать таким образом, чтобы затраты на редко используемые команды были минимальными.
При наличии статистических данных можно разработать (выбрать) ЭВМ с эффективной системой команд. Одним из подходов к достижению данной цели является разработка команд длиной в одно слово и кодирование их таким образом, чтобы разряды таких коротких команд использовать оптимально, что позволит сократить время реализации программы и ее длину.
Другим подходом к оптимизации системы команд является использование микроинструкций. В этом случае отдельные биты или группы бит команды используются для кодирования нескольких элементарных операций, которые выполняются в одном командном цикле. Эти элементарные операции не требуют обращения к памяти, а последовательность их реализации определяется аппаратной логикой.
Сокращение времени выполнения программ и емкости памяти достигается за счет увеличения сложности логики управления.
Важной характеристикой команды является ее формат, определяющий структурные элементы команды, каждый из которых интерпретируется определенные образом при ее выполнении. Среди таких элементов (полей) команды выделяют следующие: код операции, определяющий выполняемое действие; адрес ячейки памяти, регистра процессора, внешнего устройства; режим адресации; операнд при использовании непосредственной адресации; код анализируемых признаков для команд условного перехода.
Классификация команд по основным признакам представлена на рис. 4.8. Важнейшим структурным элементом формата любой команды является код операции (КОП), определяющей действие, которое должно быть выполнено. Большое число КОП в процессоре очень важно, так как аппаратная реализация команд экономит память и время. Но при выборе ЭВМ необходимо концентрировать внимание на полноте операций с конкретными типами данных, а не только на числе команд, на доступных режимах адресации. Число бит, отводимое под КОП, является функцией полного набора реализуемых команд.
При использовании фиксированного числа бит под КОП для кодирования всех m команд необходимо в поле КОП выделить несколько двоичных разрядов. Однако, учитывая ограниченную длину слова мини- и микроЭВМ, различное функциональное назначение команд, источники и приемники результатов операций, а также то, что не все команды содержат адресную часть для обращения к памяти и периферийным устройствам, в малых ЭВМ для кодирования команд широко используется принцип кодирования с переменным числом бит под поле КОП для различных групп команд.
В некоторых командах необходим только один операнд, и они называются однооперандными (или одноадресными) командами в отличие от двухоперандных (или двухадресных), в которых требуются два операнда. При наличии двух операндов командой обычно изменяется только один из них. Так как информация берется только из одной ячейки, эту ячейку называются источником; ячейка, содержимое которой изменяется, называется приемником.

Рис. 4.8. Классификация команд
Ниже приведен формат двухадресной (двухоперандной) команды процессоров.









