

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Интересное:
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Принципы управления денежными потоками: одним из методов контроля за состоянием денежной наличности является...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
СЕРГУНИН Н.А., ИГЭУ, г. Иваново
Науч. рук. ассистент ЗАХАРОВ М.А.
В наше время всё большее распространение и применение получают дроны и другие беспилотные аппаратные устройства. Дроны начали стремительно набирать популярность с 2015 года. Безусловно они появились значительно раньше, но в последнее время благодаря частому упоминанию в СМИ и довольно обширной сфере применения, их популярность стала расти еще быстрее. Теперь это не просто игрушки для детей, но и средства различных видов наблюдений, применяемых как в гражданской, так и в военной области.
Классический квадрокоптер представляет собой крестообразную раму, на концах лучей которой вертикально закреплены моторы (рисунок)
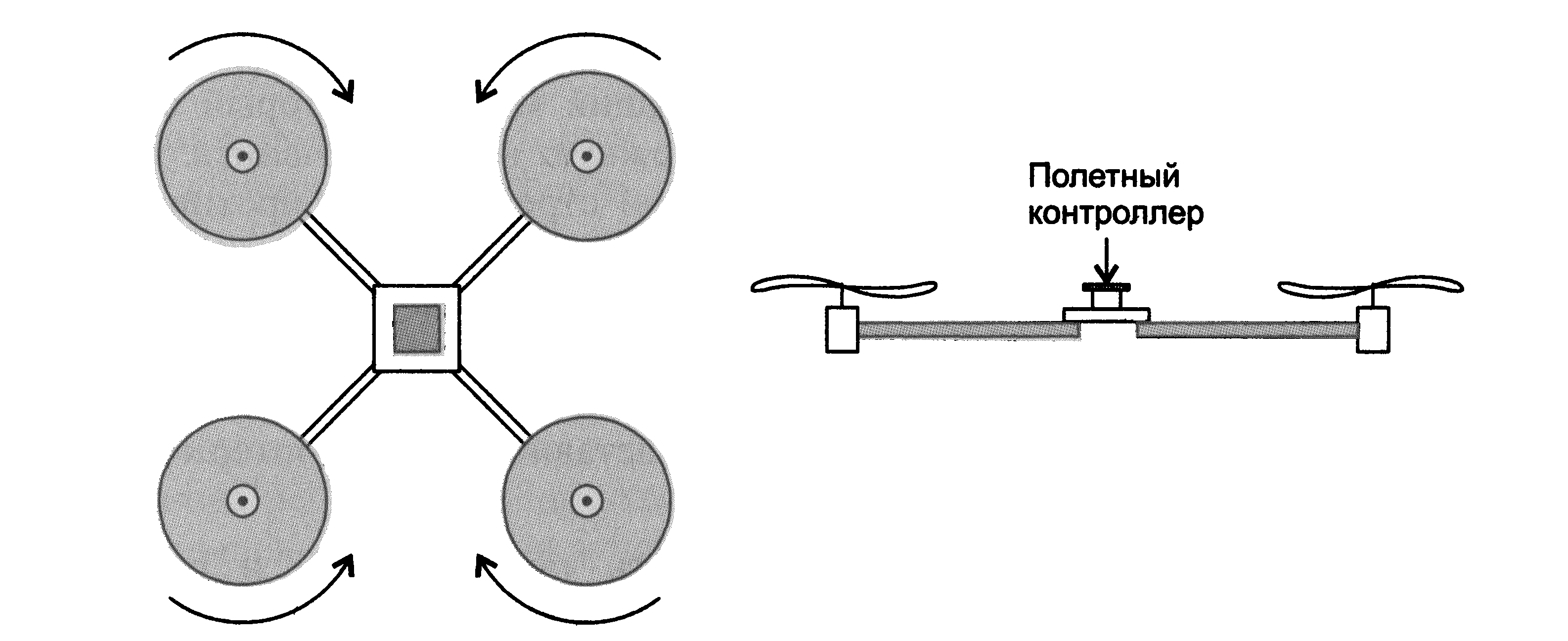
Схема конструкции простейшего
Воздушные винты, расположенные на диагональных лучах рамы, создают суммарную вертикальную тягу. Управляемый четырьмя разнесенными винтами, квадрокоптер представляет собой нестабильную динамическую систему, которая в силу нелинейности математической модели должна быть стабилизирована сложными управляющими алгоритмами. Задачи управления пространственным движением беспилотных аппаратов рассматриваются, например, на основе модели движения центра масс, записанных в траекторной системе координат. Однако, в случае с четырехвинтовым аппаратом удобнее использовать модель движения, учитывающую движение вокруг центра масс. В научных публикациях имеются различные подходы к решению данной проблемы, включающие, например, использование ПИД-регуляторов, управление с прогнозирующими моделями, применяющие скользящий режим, backstepping-управление. В работе используется метод, позволяющий при помощи линеаризации уравнений математической модели обрат ной связью перемещать аппарат в заданную в пространстве точку и поворачиваться на заданный угол вокруг вертикальной оси при минимальных дополнительных допущениях:
|
|
1) Квадрокоптер представляется шаром с радиусом и массой на расстоянии от центра которого расположены материальные точки с массой
2) Квадрокоптер считается симметричным телом, у которого главные оси инерции совпадают с осями строительной системы координат.
Синхронное регулирулирование оборотов моторов регулирует тягу, которая перемещает квадрокоптер по вертикали. Изменение оборотов моторов неравномерно вызывает горизонтальное перемещение квадрокоптера. Так, при увеличении оборотов двух задних моторов его задняя часть приподнимется и квадрокоптер полетит вперед. За счет неравномерного изменения оборотов всех моторов квадрокоптер способен лететь в произвольном направлении.
Вращающиеся винты создают реактивный крутящий момент, который старается развернуть квадрокоптер в сторону, противоположную вращению винта. Поэтому в квадрокоптере два винта вращаются по часовой стрелке и два против часовой стрелки, взаимно уравновешивая реактивные моменты. При увеличении оборотов моторов, вращающихся по часовой стрелке, и в равной мере уменьшении оборотов у вращающихся против часовой стрелки, суммарная вертикальная тяга не изменится, однако реактивный момент раскомпенсируется и рама начнет поворачиваться против часовой стрелки. Аналогично можно заставить квадрокоптер поворачиваться по часовой стрелке.
Угловые отклонения по осям называют: Pitch (наклон вперед-назад), Roll (наклон вправо-влево), Yaw (вращение в горизонтальной плоскости) и Throttle (общий газ) Оборотами моторов в режиме реального времени управляет специальная вычислительная система на основе достаточно быстродействующего микроконтроллера, так называемый полетный контроллер. Он постоянно опрашивает встроенные гироскопы, акселерометры, барометр, сигналы от приемника радиоуправления и на основе полученных данных рассчитывает управляющие сигналы для каждого мотора в отдельности.
|
|
В работе описан вывод математической модели квадрокоптера и на ее основе построен механизм перемещения аппарата по заданной линейной траектории с определенным углом и его стабилизации в заданной точке. Полученные результаты смоделированы в системе MATLAB и приведен пример последовательного передвижения аппарата в пространстве.
УДК 62-03(075.8)
Эффективное подавление гармоник входного тока многоуровневого преобразователя частоты
для регулируемого электропривода
ХАБИБУЛЛИН А.И., УГНТУ, г. Уфа
Науч. рук. канд. техн. наук, доцент РЯБИШИНА Л.А.
В современных экономических условиях актуальны вопросы оптимизации потребления электроэнергии. Главные энергопотребители – мощные высоковольтные электроприводы. Современным направлением оптимизации режимов работы электропривода является внедрение частотного регулирования за счет применения преобразователей частоты (ПЧ).
При работе ПЧ важным свойством является уровень помех, возникающих вследствие двойного преобразования энергии. Наличие помех вызывает перегрев обмоток, преждевременное старение изоляции, увеличение потерь мощности, снижение КПД и т.д.
Принцип работы многоуровневого ПЧ (МПЧ) подразумевает, что выходное напряжение образуется как сумма импульсов напряжений автономного инвертора напряжения (АИН), сдвинутых по несущей частоте. При всем при этом наряду с основной гармоникой складываются и высшие гармоники. Чтобы достичь высокого качества выходного напряжения, необходимо несущую частоту принимать достаточно высокой. Даже при минимальной несущей частоте 600 Гц возникают значительные потери на переключение ключей. Из этого следует, что, достигая уменьшения потерь на переключение ключей, мы добьемся также и уменьшения потерь в инверторном блоке за счет применения многоуровневой схемы. Также проблемой является то, что в звене постоянного тока происходит возникновение высших гармоник входного тока.
Регулирование напряжения на выходе АИН возможно с помощью синусоидальной широтно-импульсной модуляции (ШИМ) и ШИМ с высокой частотой.
Для подавления субгармоник во входном токе выпрямителя необходима определенная организация звена постоянного тока. Эффективное подавление данных субгармоник во входном токе МПЧ достигается при питании выпрямителя АИН одного уровня в разных фазах МПЧ от вторичных обмоток трансформатора с одинаковой фазой напряжения. В данном случае применяется ШИМ с высокой частотой. Данная модуляция приводит к уменьшению потерь на переключение ключей АИН. В таком случае импульсное напряжение, формируемое активным выпрямителем напряжения на стороне переменного тока, имеет гармонический состав, в котором основная и высшая гармоники существенно различаются по частоте. Таким образом, нарушаются условия для качественной фильтрации высших гармоник тока, потребляемого из питающей сети с помощью буферных реакторов. Следовательно, при ограниченных значениях индуктивности буферных реакторов решается задача потребления из сети практически синусоидальных токов.
|
|
|
|
|

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!