1. Каковы основные признаки классификации радиотехнических средств и систем, применяемых в ГА?
Все существующие радиотехнические средства и системы можно разделить по информационному признаку на две большие группы:
¾ системы передачи информации (системы радиосвязи, радиовещания);
¾ системы извлечения информации (радиолокации, радионавигации).
Другим признаком классификации радиоэлектронных средств, применяемых в ГА, является их назначение. По назначению РЭС ГА подразделяются на четыре группы:
-средства связи;
-средства посадки:
-средства навигации:
-средства управления воздушным движением.
Ещё один важный признак классификации - диапазон рабочих частот, существенно влияющий на эксплуатационные возможности РЭС.
2. Каково назначение систем радиолокации?
Радиолокация – обнаружение, определение координат и свойств движущихся и неподвижных объектов радиотехническими методами с использованием радиоволн, отражённых или переизлучённых этими объектами.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС) или радиолокаторами; а наблюдаемые объекты — радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения и т. п.
В радиолокации наиболее часто измеряются дальность между целью и РЛС, угловые координаты (азимут, угол места) и радиальную, относительно радиолокатора, составляющую скорости движения. (Азимут - это угол между направлением на цель и северным направлением, измеренный в горизонтальной плоскости. Угол места измеряется между вектором наклонной дальности и его проекцией на горизонтальную плоскость.) В задачу радиолокационного наблюдения в некоторых случаях входит также идентификация (распознавание) целей.
Назначение:
· Управление движением ВС на земле и в воздухе
· Предотвращение конфликтных ситуаций в полете
· Обеспечение безопасных интервалов между ВС в горизонтальных и вертикальных плоскостях
· Осуществление взлета и посадки в сложных метеоусловиях
· Помощь при облете опасных грозовых очагов
Эксплуатационные характеристики радиолокационных систем УВД
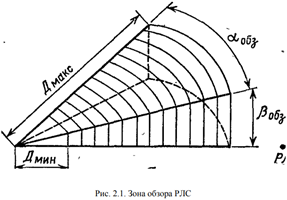
1. Зона радиолокационного обзора – область пространства, в пределах которой производится облучение и прием и обработка отраженных сигналов (для пассивных РЛС – только прием отраженных сигналов), в том числе обнаружение целей с заданными характеристиками. Эта зона (рис. 2.1) ограничивается по дальности пределами Дмин - Дмакс, по азимуту — величиной αобз и по углу места — величиной βобз.
2. Период обзора Тобз – длительность цикла, необходимого для облучения и приема сигналов от всех точек зоны радиолокационного обзора. Зависит от ширины ДН антенны РЛС, сектора обзора, числа импульсов, отраженных от целей за время одного обзора и максимальной дальности действия.
3. Разрешающая способность РЛС – это минимально возможное смещение цели относительно другой цели по соответствующей координате (при одинаковых значениях всех других координат), при котором возможно раздельное их наблюдение и измерение координат и параметров движения. Разрешающая способность РЛС является тактической характеристикой, определяющей возможности РЛС разделять близко расположенные объекты и их элементы при их зондировании.
4. Помехоустойчивость – способность РЛС сохранять тактические показатели при воздействии помех. Помехоустойчивость тем выше, чем меньше внешние помехи снижают максимальную дальность действия РЛС.
5. Объём и качество получаемой информации (характеристика для СВРЛ). Объём информации характеризуется числом бит, приходящихся на одно сообщение, а качество - вероятностью ошибки приема одного бита или всего сообщения в целом.
3. Каковы отличительные особенности систем радионавигации?
Радионавигация – вождение движущихся объектов по заданным траекториям с помощью излучения и приёма радиоволн с использованием радиоэлектронных средств и радиотехнических методов.
Отличительной особенностью РНС является передача информации или формирование информации с помощью электромагнитных волн радиодиапазона. Радиоволны, несущие ту или иную информацию, называются радиосигналами. В зависимости от вида используемого радиосигнала необходимо различать: РНС, работающие только на прием (рисунок 1.16,а); РНС, формирующие запросный сигнал и получающие ответный сигнал, содержащий навигационную информацию (рисунок 1.16,б); РНС радиолокационного типа, получающие навигационную информацию в 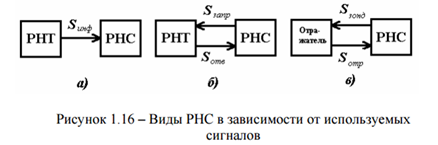
отраженном от поверхности земли или от иного объекта сигнале.
4. Какие свойства радиосигналов (электромагнитных волн) лежат в основе функционирования радиолокационных и радионавигационных средств и систем?
Основные свойства радиоволн:
постоянство скорости распространения в свободном пространстве, равной скорости света;
прямолинейность распространения в свободном пространстве;
отражение от границы двух сред (зеркальное и диффузное)
эффект Доплера (из-за того, что объект движется, то переизлучаемый от него сигнал будет иметь сдвиг по частоте относительно излучённого сигнала)
интерференция
Эффектом Доплера называют изменение частоты волн, регистрируемых приемником, которое происходит вследствие движения источника этих волн и приемника.
Интерференция - сложение двух или более волн, при котором амплитуда результирующей волны зависит от разности фаз исходных волн в данной точке пространства. Если складываются волны с одинаковой фазой, то амплитуда результирующей волны будет увеличиваться, а если с противоположными фазами, то уменьшаться (вплоть до 0).
5. Каковы физические основы радиолокации; виды радиолокации?
Радиолокация – обнаружение, определение координат и свойств движущихся и неподвижных объектов радиотехническими методами с использованием радиоволн, отражённых или переизлучённых этими объектами. Объекты наблюдения называются радиолокационными целями. Результатом наблюдения является обнаружение целей, измерение их координат, а в необходимых случаях и скорости. Устройства, решающие эти задачи, называются радиолокационными станциями (РЛС). Совокупность сведений, получаемых с помощью РЛС, называется радиолокационной информацией. Информацию несут радиолокационные сигналы. Для РЛС ГА это сигналы, отраженные целью (ВС) или излученные ответчиком, расположенным на ВС.
Радиолокационные методы наблюдения основаны на использовании следующих физических явлений: отражения радиоволн; постоянства скорости распространения радиоволн в однородной среде; возможности создания направленного излучения радиоволн.
В службе УВД применяются два вида радиолокации:
1. с пассивным ответом, при котором сигналы формируются в результате отражения объектами наблюдения зондирующих сигналов. РЛС, использующие этот вид радиолокации, называются первичными (ПРЛС);
2. с активным ответом, при котором сигналы формируются как ответы с ВС на запросы, излучаемые наземной РЛС. Ответный сигнал несет не только координатную, но и дополнительную (полетную) информацию о состоянии ВС: о бортовом номере, высоте полета, а также остатке топлива, векторе скорости ВС, об аварии на борту, потере радиосвязи и несанкционированном вмешательстве в действия экипажа. РЛС, использующие этот вид радиолокации, называются вторичными (ВРЛС).
РЛС УВД измеряют две координаты: наклонную дальность RH и азимут α. Наблюдение по углу места ведется только в посадочных РЛС. Высота полета с помощью РЛС не измеряется, так как она определяется на ВС баровысотомером и передается ответчиком.
Отраженные сигналы образуются в результате взаимодействия ЭМВ зондирующего импульса с объектами, физические свойства которых отличаются от свойств среды распространения. Параметрами, характеризующими физические свойства среды, являются электрическая и магнитная проводимости, диэлектрическая и магнитная проницаемости. Отраженная ЭМВ возникает из-за того, что электромагнитное поле волны вызывает на поверхности объекта вынужденные колебания свободных и связанных зарядов, синхронные с колебаниями падающей ЭМВ. В результате на всей поверхности объекта образуются токи, создающие вне объекта вторичное электромагнитное поле, т. е. ЭМВ, рассеивающиеся во всех направлениях. Эта волна и является радиолокационным сигналом. Интенсивность отражений в различных направлениях зависит от размеров и конфигураций цели, электрических и магнитных параметров цели, состояния ее поверхности, а также от длины волны и ее поляризации.
Объекты отражения, называемые радиолокационными целями, могут быть поверхностно- или объемно-распределенными и точечными. Поверхностно-распределенные объекты имеют большое число элементов, случайным образом расположенных на поверхности.
К ним относятся земная и неспокойная водная поверхности. Объемно-распределенные объекты отражения состоят из большого числа однородных и малых по размерам элементов, случайно расположенных в некотором объеме пространства. Это — облака, дождь, снег, град, туман. Оба указанных вида объектов отражения являются источниками помех, затрудняющими обнаружение целей.
ВС относятся к малоразмерным (точечным) целям, так как их геометрические размеры много меньше разрешаемого импульсного объема РЛС.
6. Почему энергетика радиолинии при радиолокации по точечному объекту обратно пропорциональна четвёртой степени расстояния?
При функционировании систем радиолокации предполагается что объекты радиолокационного наблюдения, ВС, имеют размеры меньше, чем объем пространства, занимаемый радиосигналом в некоторый момент времени, поэтому их можно считать точечными.
Найдем плотность потока мощности, создаваемую излучением радиолокатора, в месте расположения объекта на удалении R c учетом направленных свойств передающей антенны Gпрд.

Падающее на объект излучение будет рассеиваться им во всех направлениях в зависимости от отражающих свойств, которые характеризуются его эффективной площадью рассеяния (ЭПР) (σц). Поэтому в точке расположения объекта

Поскольку отражаемый объектом сигнал рассеивается равномерно по всем направлениям, то, пройдя расстояние R обратно до антенны радиолокатора, он создаст плотность потока мощности у приемной антенны 

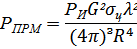
Тогда при известной эффективной площади антенны можно найти мощность сигнала на входе приемного устройства:

Как правило, в радиолокаторах одна и та же антенна используется как для излучения, так и для приема радиосигналов, поэтому ее характеристики считаются одинаковыми в обоих режимах. Учитывая это и выражение о взаимосвязи эффективной площади и коэффициента усиления антенны:  , получим:
, получим:
Требуется, чтобы мощность принимаемого сигнала была не меньше чувствительности приемника, т. е. при максимальной дальности
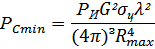
Отсюда с учетом уравнения чувствительности и ширины полосы пропускания приемника:
 =
=  ∆
∆  ∆ =
∆ = 
Выразим Rmax:
Эту зависимость часто называют основным уравнением радиолокации, которое связывает основные технические параметры приёмопередающей аппаратуры и отражающие свойства объекта с эксплуатационными показателями. Таким образом, из-за переотражения от объекта сигнал проходит двойное расстояние, поэтому и энергетика радиолиний обратно пропорциональна четвертой степени расстояния. Это означает что для ощутимого увеличения дальности необходимо значительное увеличение мощности излучения, коэффициента усиления антенны, ЭПР или улучшение чувствительности приемника.
7. Чем определяется дальность действия запросно-ответных радиолиний (вторичной радиолокации) с импульсным излучением?
Запросно-ответная радиолиния с импульсным излучением используется в системах вторичной радиолокации и некоторых системах радионавигации. (маяки РМА/РМД – самолетные дальномеры, приемники типа КУРС-МП).
Максимальная дальность действия запросной радиолинии равна:
Аналогично максимальная дальность действия ответной радиолинии:
Окончательно максимальная дальность действия запросно-ответной радиолинии будет определяться меньшей из двух величин соотношений

Здесь:
PИ – мощность излучаемых колебаний (при импульсном излучении – мощность в импульсе), Вт
τИ – длительность излучаемых сигналов, с
GПРД – коэффициент усиления передающей антенны
 – эффективная площадь антенны ответчика, м2
– эффективная площадь антенны ответчика, м2
 – эффективная площадь антенны запросчика, м2
– эффективная площадь антенны запросчика, м2
kШ – коэффициент шума приемника
kБ – постоянная Больцмана, Дж/К (kБ = 1,38 · 10−23)
kР – коэффициент различимости, равный отношению энергии одиночного сигнала к спектральной плотности шума
T0 – абсолютная температура, соответствующая уровню шумов приемника (T0 = 290 K).
8. В чём заключается влияние атмосферы и земной поверхности на дальность обнаружения радиолокационных объектов.
Влияние атмосферы. При распространении радиоволн в атмосфере происходят искривление траектории радиоволн (рефракция) и рассеяние электромагнитной энергии атомами и молекулами воды и газов, а также частицами пыли (аэрозолями). Последний фактор приводит к затуханию радиоволн.
Рефракция обусловлена изменением относительной диэлектрической проницаемости атмосферы ε,, которое приводит к изменению коэффициента преломления  , а в конечном результате - к искривлению траекторий распространения радиоволн. В нижнем слое атмосферы (тропосфере) ε, меняется с высотой в зависимости от изменения давления, температуры и влажности, что и приводит к рефракции радиоволн.
, а в конечном результате - к искривлению траекторий распространения радиоволн. В нижнем слое атмосферы (тропосфере) ε, меняется с высотой в зависимости от изменения давления, температуры и влажности, что и приводит к рефракции радиоволн.
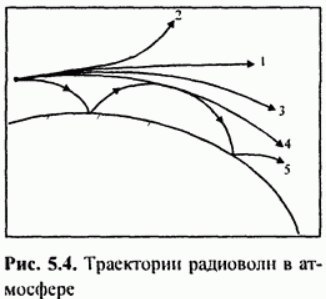 По градиенту коэффициента преломления dn / dH различают следующие виды рефракции и искривления траекторий радиоволн (рис. 5.4):
По градиенту коэффициента преломления dn / dH различают следующие виды рефракции и искривления траекторий радиоволн (рис. 5.4):
dn / dH =0 – рефракция отсутствует, траектория прямолинейна;
dn / dH >0 – отрицательная рефракция, траектория отклоняется вверх;
dn / dH <0 – положительная рефракция, траектория отклоняется вниз;
dn / dH = -0,157×10-6 м-1 – критическая рефракция, траектория радиоволн круговая относительно центра Земли;

dn / dH <( dn / dH )кр – сверхрефракция, когда вследствие атмосферных аномалий из-за инверсного изменения влажности и температуры в прилегающем к поверхности Земли слое атмосферы возникают так называемые атмосферные волноводы (рис. 5.5), и радиоволны, отражаясь от верхней границы волновода и поверхности Земли, могут распространяться на большие расстояния.
Затухание радиоволн в атмосфере начинает сказываться при λ<30 см и зависит от длины волны (частоты) радиосигнала и состояния (влажности) атмосферы на трассе распространения радиоволн (высоты трассы).
С учетом затухания дальность действия радиосистемы определяется выражением
 ,
,
где  - дальность действия в свободном пространстве; α - удельный коэффициент затухания (дБ/км).
- дальность действия в свободном пространстве; α - удельный коэффициент затухания (дБ/км).
Атомы, молекулы газов атмосферы и пылевые частицы поглощают энергию радиоволн на всей трассе распространения, в то время как капельки воды (влага) могут вызывать резкое увеличение рассеяния радиоволн на отдельных участках пути. Гидрометеорологические образования (водяные частицы, снег, град) являются основным источником ослабления и рассеивания радиоволн в атмосфере. Интенсивность поглощения дальности радиоволн гидрометеорами зависит от длины волны λ. Поглощение следует учитывать при λ<20 см. Оно наиболее велико при λ=1…3 см.
Влияние подстилающей поверхности. При проектировании РЛС и РНС необходимо учитывать искажения ДНА радиолокатора из-за близости антенны к подстилающей (земной) поверхности и влияние ее сферичности на дальность действия системы.
Искажение ДНА в вертикальной плоскости обусловлено интерференцией радиоволн, распространяющихся прямолинейно от антенны радиолокатора до цели и обратно, и отражением от поверхности. Отраженный от поверхности сигнал появляется при выполнении условия  где
где  - ширина главного лепестка ДНА в вертикальной плоскости по уровню нулевой мощности;
- ширина главного лепестка ДНА в вертикальной плоскости по уровню нулевой мощности;  - угол наклона максимума ДНА к горизонту.
- угол наклона максимума ДНА к горизонту.
Сферичность Земли ограничивает дальность действия РЛС, в которой используются радиоволны с длиной менее 10 м, распространяющиеся над земной поверхностью. Дальность прямой видимости с учетом кривизны земной поверхности можно оценить по эмпирическому выражению

где h1 и h2 – высота над землей передающей и приемной антенн соответственно.

С учетом явления рефракции, особенно при распространении радиоволн диапазона ОВЧ, возможно некоторое увеличение дальности:

9. Поясните методы местоположения объектов и измерения координат и в радиолокационных и радионавигационных системах ГА.
Существуют следующие методы определения местоположения объектов:
Пеленгационный (угломерный) метод при реализации его на плоскости предполагает наличие не менее двух навигационных точек с известными координатами, относительно которых определяются линии положения в виде прямых равного пеленга. Пересечение этих линий и даёт местонахождение ВС.
Дальномерный метод также требует наличия не менее двух, а для устранения неоднозначности – трёх навигационных точек, относительно которых определяются линии положения в виде окружностей постоянного радиуса, и на их пересечении находится местоположение ВС.
Разностно-дальномерный метод основан на определении разности дальностей между ВС и наземными навигационными точками, но сами расстояния до навигационных точек не измеряются. При этом линии положения на плоскости имеют вид гипербол, по пересечению которых возможно определение местоположения ВС.
Угломерно-дальномерный метод обладает уникальным свойством – возможностью нахождения местоположения ВС при наличии всего лишь одной навигационной точки с известными координатами. При этом местонахождение ВС определяется пересечением линий положения – окружности постоянной дальности и прямой постоянного пеленга, построенных из одной навигационной точки.
Применяют следующие методы измерения координат:
- импульсный метод
- частотный метод
- фазовый метод
- амплитудный метод
10. Какими достоинствами и недостатками обладают пеленгационный и дальномерный методы определения местоположения ВС?
Пеленгационный (угломерный) метод при реализации его на плоскости предполагает наличие не менее двух навигационных точек с известными координатами, относительно которых определяются линии положения в виде прямых равного пеленга. Пересечение этих линий и даёт местонахождение ВС.
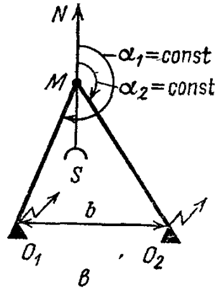 Пеленгационный метод основан на использовании направленных свойств антенн. Этот метод реализуется посредством радиопеленгатора, установленного на объекте М, и двух радиомаяков, расположенных в опорных пунктах О1 и О2 (рис. 1.7, в) с базой b (расстояние между маяками)
Пеленгационный метод основан на использовании направленных свойств антенн. Этот метод реализуется посредством радиопеленгатора, установленного на объекте М, и двух радиомаяков, расположенных в опорных пунктах О1 и О2 (рис. 1.7, в) с базой b (расстояние между маяками)
Радиопеленгатор представляет собой радиоприемное устройство с направленной антенной, а радиомаяк – передающее устройство с ненаправленной антенной. Пеленгатор измеряет азимуты α1 маяка О1 и α2 маяка О2, и так как линии положения с постоянными пеленгами (α1 = const, α2 = const) представляют собой прямые, проходящие под углами α1, α2 к направлению юг-север, то они имеют одну точку пересечения, которая является искомой, т. е. совпадает с целью М.
Достоинства пеленгационного метода:
1. Простота организации (всего 2 станции)
Недостатки пеленгационного метода:
1. Преобладание систематических ошибок, вызванных неточностью установки антенн
2. Необходимость постоянно калибровать антенну
3. Низкая точность измерения координат
4. Необходимость использования в пространстве нескольких разнесённых пеленгаторов
5. Средства радиопеленгования должны быть связаны между собой системой связи.
Дальномерный метод также требует наличия не менее двух, а для устранения неоднозначности – трёх навигационных точек, относительно которых определяются линии положения в виде окружностей постоянного радиуса, и на их пересечении находится местоположение ВС.
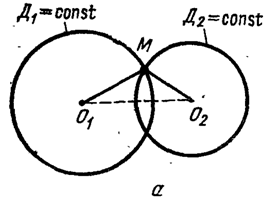 Дальномерный метод заключается в определении местоположения цели М (рис. 1.7, а) измерением расстояний между целью и опорными пунктами О1 и О2.
Дальномерный метод заключается в определении местоположения цели М (рис. 1.7, а) измерением расстояний между целью и опорными пунктами О1 и О2.
Каждая поверхность положения представляет собой сферу с центром в опорном пункте и радиусом, равным дальности. Так как точки М, О1 и О2 находятся в одной плоскости, то поверхности положения переходят в окружности радиусами О1M = Д1 и О2M = Д2 с точкой пересечения на цели М. Имеется еще одна точка пересечения окружностей, но неоднозначность измерений можно исключить.
Достоинства дальномерного метода:
1. Поскольку измерение времени задержки сигнала может производиться с малыми погрешностями, дальномерные РНС позволяют найти координаты с высокой точностью.
Недостатки дальномерного метода:
1. Так как окружности пересекаются в двух точках, то возникает неоднозначность отсчета, для исключения которой применяют дополнительные средства ориентирования, точность которых может быть невысокой, но достаточной для достоверного выбора одной из двух точек пересечения.
11. В чём заключаются преимущества угломерно-дальномерного метода местоопределения объектов?
Угломерно-дальномерный метод обладает уникальным свойством – возможностью нахождения местоположения ВС при наличии всего лишь одной навигационной точки с известными координатами. При этом местонахождение ВС определяется пересечением линий положения – окружности постоянной дальности и прямой постоянного пеленга, построенных из одной навигационной точки.
Дальномерно-угломерный метод требует применения только одной станции, содержащей радиодальномер и радиопеленгатор. Из точки стояния станции O дальномер определяет наклонную дальность цели ОМ = Д, а пеленгатор устанавливает направление на цель, т. е. ее азимут α и угол места β. Цель М находится на пересечении поверхности положения дальномера в виде сферы радиуса ОМ = Д и линии положения пеленгатора — в виде прямой с угловыми координатами α и β, проходящей через точку О. Этот метод 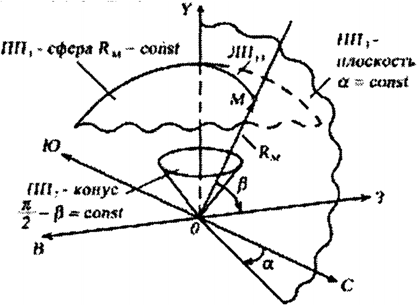
наиболее характерен для радиолокации, а остальные методы — для радионавигации.
Однако и в радиолокации местоположение цели определяют иногда из двух и более точек. Например, если обычная PЛС производит пеленгацию с большими ошибками, то прибегают к дальномерному методу, а если дальномерную часть РЛС нельзя использовать из-за сильных помех или вследствие применения пассивной радиолокации, то прибегают к пеленгационному методу.
12. Каковы особенности разностно-дальномерного метода определения местоположения ВС?
Разностно-дальномерный метод основан на определении разности дальностей между ВС и наземными навигационными точками, но сами расстояния до навигационных точек не измеряются. При этом линии положения на плоскости имеют вид гипербол, по пересечению которых возможно определение местоположения ВС.
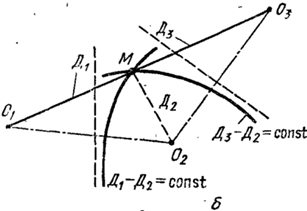 Разностно-дальномерный метод (рис. 1.7, б) требует наличия на плоскости двух пар опорных пунктов О1, О2 и О2, О3. Один из них обычно общий (О2). Каждая пара станций используется для получения линий положения в виде гипербол с фокусами в опорных пунктах. Эти линии строятся как геометрические места точек с постоянной разностью расстояний: Д1- Д2=const от О1 и О2; Д3- Д2=const от О2 и О3. Точка пересечения гипербол совпадает с целью М.
Разностно-дальномерный метод (рис. 1.7, б) требует наличия на плоскости двух пар опорных пунктов О1, О2 и О2, О3. Один из них обычно общий (О2). Каждая пара станций используется для получения линий положения в виде гипербол с фокусами в опорных пунктах. Эти линии строятся как геометрические места точек с постоянной разностью расстояний: Д1- Д2=const от О1 и О2; Д3- Д2=const от О2 и О3. Точка пересечения гипербол совпадает с целью М.
13. Поясните понятие «разрешающая способность РЛС по дальности и угловым координатам». Каковы методы её улучшения?
Разрешающая способность по дальности – это способность раздельного наблюдения целей, расположенных близко между собой по дальности. Она определяется минимальным расстоянием между двумя расположенными на одном азимуте относительно РЛС целями, например, ВС, при котором возможно их раздельное наблюдение.
Реальная разрешающая способность по дальности определяется следующим образом:

где  – потенциальная разрешающая способность РЛС по дальности;
– потенциальная разрешающая способность РЛС по дальности;
 – разрешающая способность индикатора по дальности.
– разрешающая способность индикатора по дальности.
Потенциальная разрешающая способность по дальности определяется длительностью зондирующих сигналов τИ:
Разрешающая способность индикатора по дальности определяется характеристиками самого индикатора. В частности, для индикатора на основе электронно-лучевой трубки справедлива формула
где dп – диаметр рисующего пятна; М – масштаб изображения.
В свою очередь, масштаб изображения может быть описан формулой

Где Dэкр – рабочий диаметр экрана, Rразв – дальность, воспроизводимая на развертке в электронно-лучевой трубке индикатора кругового обзора.
Разрешающая способность по азимуту – это способность раздельного наблюдения целей, расположенных на разных, но близких по значению азимутах относительно РЛС и на одинаковом удалении. Она определяется минимальным значением утла между направлениями на две цели (например, ВС) находящиеся на одной дальности от РЛС, при котором возможно их раздельное наблюдение.
Реальная разрешающая способность по азимуту определяется следующим образом:

где  – потенциальная разрешающая способность РЛС по азимуту;
– потенциальная разрешающая способность РЛС по азимуту;
 – разрешающая способность индикатора кругового обзора по азимуту.
– разрешающая способность индикатора кругового обзора по азимуту.
Потенциальная разрешающая способность по азимуту определяется ДН антенны РЛС:

где ϴО,5 – ширина ДН антенны в горизонтальной (азимутальной) плоскости по половинной мощности излучения - (0,5).
Разрешающая способность ИКО по азимуту определяется характеристиками самого индикатора. Для индикатора в виде электронно-лучевой трубки справедлива формула
где l – расстояние на экране от начала развёртки до отметки цели (например, ВС) на экране ИКО; Q – качество фокусировки, определяемое числом рисующих пятен с диаметром dп, укладывающихся на рабочем диаметре экрана Dэкр.
Таким образом, разрешающая способность по азимуту зависит от местоположения цели и тем она больше, чем дальше от центра экрана расположена отметка радиолокационной цели.
Методы улучшения:
1)Байесовский метод (Вероятность определяется как степень уверенности в истинности суждения.)
2)Обобщающий метод максимального правдоподобия
3)Метод спектрального оценивания
4)Проекционный метод
5)Метод сверх разрешения
14. Какой метод измерения дальности обладает разрешающей способностью по дальности и почему?
Импульсный метод измерения дальности основывается на определении времени запаздывания характерного изменения амплитуды принимаемого радиолокационного сигнала. Антенна РЛС посылает мощный радиоимпульс, который отражается от цели и ей же и принимается. Идею импульсного метода радионавигационных измерений можно пояснить на примере работы самолетного радиодальномера. На ВС устанавливается импульсный приемопередатчик с антенной, называемый запросчиком. На земле в точке с известными координатами располагается ретранслятор, способный принимать сигналы запросчика и переизлучать их. Т.к. скорость распространения СВЧ сигнала, в виде которого распространяется радиоимпульс, много больше скорости цели, то в хорошем приближении цель можно считать неподвижной. Тогда время, за которое радиосигнал достигнет цели – tпрямого равняется времени, за которое отраженный сигнал достигнет антенны РЛС – tотр. Т. е. tпрямого = tотр = t.
Т. е. сигнал, испущенный антенной РЛС, вернется на нее в отраженном виде через время tD = tпрямого + tотр = 2t. СВЧ сигналы распространяются с постоянной скоростью, поэтому D = c × t. Мы учли, что скорость распространения СВЧ сигнала в воздухе примерно равна его скорости распространения в вакууме - c. Учтем предыдущее выражение, и запишем равенство, определяющее дальность D в зависимости от времени запаздывания tD

Импульсный метод лежит также в основе функционирования радиолокационных средств. Бортовые радиолокаторы излучают зондирующие импульсы в направлении наблюдаемых наземных или атмосферных объектов. Эти сигналы отражаются объектами, принимаются на ВС, где определяется время их запаздывания относительно зондирующих импульсов. По времени запаздывания огибающей импульсов рассчитывается расстояние до отражающих объектов.
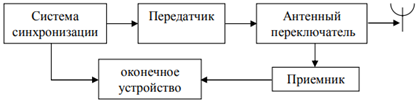
Для того, чтобы постоянно определять дальность, РЛС должна испускать периодическую последовательность импульсов, – работать в импульсном режиме. Проанализированных данных достаточно, чтобы построить общую структурную схему.
Система синхронизации определяет импульсную работу РЛС. Она формирует видеоимпульсы через постоянные промежутки времени Ти. Ти называют периодом повторения импульса. Система синхронизации определяет период работы – один цикл определения дальности.
Передатчик включается получив очередной импульс от системы синхронизации и на промежутке времени τи формирует сигнал требуемой мощности, амплитуды и частоты. τи – длительность импульса.
На протяжении времени длительности импульса антенный переключатель направляет излучаемый сигнал на антенну. Затем переключается на приемник. Таким образом до конца периода система “ждет” отраженного сигнала. Заметим, что на переключение антенна затрачивает определенное время tдоп.
Приемник выделяет огибающую принятого сигнала и передает на оконечное устройство.
Оконечное устройство обычно выполняется в виде ЭЛТ, на экране которой расстояние между двумя соседними разновысокими пиками соответствует расстоянию до цели.
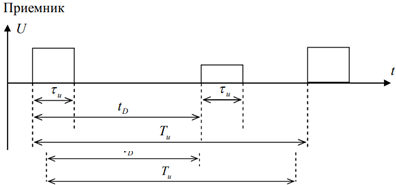
Схематические графики зависимостей U(t) на разных структурных элементах будут выглядеть следующим образом:
Импульсный метод измерения дальности обладает разрешающей способностью по дальности, так как излучаемый сигнал в импульсном методе представляет собой последовательность коротких радиоимпульсов (серии колебаний высокой частоты). Одни импульсы сигнала могут отражаться от одного объекта, другие импульсы этого же сигнала от другого объекта. Далее они поступают на приемник, затем по задержке определяется расстояние до каждого объекта. Если расстояние между объектами больше разрешающей способности, то на экране высветятся две отдельные точки.
В частотном и фазовом методах в качестве сигнала служит непрерывное колебание, т.к. это одно колебание, то отразившись от первого (ближнего) объекта, сигнал направляется в приемник. В данном случае, если имелся второй объект, то до него сигнал не дошел.
Достоинства импульсного метода измерения дальности:
возможность построения РЛС с одной антенной;
простота индикаторного устройства;
удобство измерения дальности нескольких целей;
простота излучаемых импульсов, длящихся очень малое время τи, и принимаемых сигналов;
Недостатки:
необходимость использования больших импульсных мощностей передатчика;
невозможность измерения малых дальностей
большая мертвая зона
15. В чём заключаются достоинства частотного и фазового методов измерения дальности?
Частотный метод
Частотный метод измерения дальности основан на использовании частотной модуляции излучаемых непрерывных сигналов.
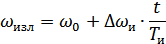
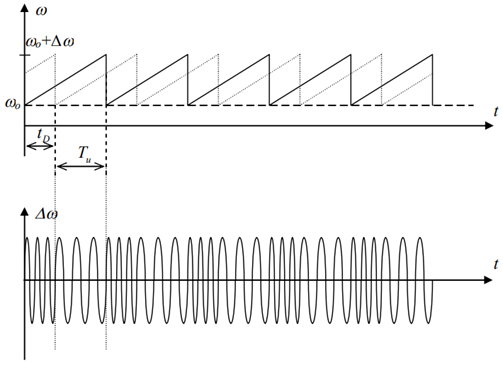
В данном методе за период излучается частота, меняющаяся по линейному закону от ω0 до ω0 + ∆ωи . Т.е. за один период зависимость частоты излучаемого сигнала от времени:
В то время как отраженный сигнал придет промодулированным линейно в момент времени, предшествующий настоящему на время задержки tD. Частота отраженного сигнала, принятого на РЛС, будет зависеть от времени следующим образом: 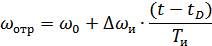
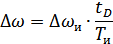
Вычитая из первого уравнения второе, получим выражение для разностной частоты ∆ω:
Выражая отсюда tD и подставляя в  , найдем зависимость дальности от разностной частоты:
, найдем зависимость дальности от разностной частоты:
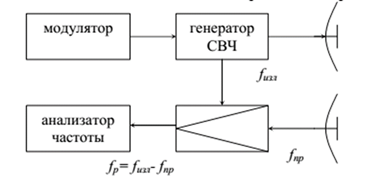
Структурная схема частотного дальномера будет выглядеть следующим образом
Модулятор формирует модуляцию частоты, вырабатываемой генератором СВЧ. После чего сигнал поступает на передающую антенну. Так как сигнал непрерывный, то требует









