3.3.1 Принцип работы танковой навигационной аппаратуры
Навигационная аппаратура с координатором (танковая навигационная аппаратура) позволяет решать две навигационные задачи и ряд тактических задач (определение прямоугольных координат целей, привязка элементов боевых порядков войск и нанесение их на топографическую карту, целеуказание и др.).
Первая навигационная задача заключается в определении текущих прямоугольных координат (х, Y) местоположения движущегося объекта и дирекционного угла (α) его продольной оси (курса движения). Для решения задачи используются параметры движения объекта: его скорость (пройденный путь) и дирекционный угол направления движения.
В процессе движения датчик путевой скорости определяет скорость движения объекта и пропорциональное ей приращение пути (ΔS), а датчик дирекционного угла определяет изменение дирекционного угла направления движения объекта. Дирекционный угол объекта регистрируется шкальным устройством и вводится в синусно-косинусный преобразователь, который вычисляет синус и косинус дирекционного угла объекта (sin αи cos α).
Приращение пути ΔS и тригонометрические функции sin α и cos α вводятся соответственно в вычислители приращений координат, которые определяют Δх и Δy решением прямой геодезической задачи (рисунок 3.6):
Δx = ΔS cos α;
Δy = ΔS sin α.

Рисунок 3.6 – Принцип определения координат объекта с помощью
координатора
Приращения координат Δx и Δy суммируются с исходными координатами точки 1 и регистрируются соответствующими счетчиками координатора:
x2 = x1 + ΔS cos α1 = x1 + Δx;
y2 = y1 + ΔS sin α1 = y1 + Δy.
При движении к следующим точкам маршрута действия повторяются. Следовательно, текущие координаты движущегося объекта равны алгебраической сумме координат исходной точки и приращений координат Δx и Δy, вычисленных аппаратурой в процессе движения объекта до конечного пункта маршрута:
n
x n = x1+ ∑ ΔХ;
1
n
y n = y1+ ∑ Δy.
1
Вторая навигационная задача – определение дирекционного угла на пункт назначения и расстояния до него выполняется решением обратной геодезической задачи по формулам:
Данная задача решается в тех случаях, когда известны координаты пункта назначения. При прибытии в пункт назначения Δx и Δy на шкалах координатора будут равны нулю.
Определение координат обнаруженных целей выполняют с использованием навигационной аппаратуры с координатором при наличии координатора цели. Обнаружив цель, зная текущие координаты машины x, y и дирекционный угол ее продольной оси, измеряют дальномером расстояние до цели S и по угломерному устройству – угол визирования β на цель и вводят эти данные в координатор цели. Счетно-решающее устройство координатора цели вычисляет приращения координат Δx и Δy, которые суммируются с координатами местонахождения машины и регистрируются соответствующими счетчиками координатора. Таким образом, определяются координаты цели:
xц = x + Δx = x + S cos α;
yц = y + Δy = y + S sin α.
Навигационная аппаратура с координатором имеет несколько модификаций, ее принципиальная схема показана на рисунке 3.7.
В комплект танковой навигационной аппаратуры обычно входят: курсовая система (гирокурсоуказатель, пульт управления и преобразователь тока), датчик пути, координатор, указатель курса. Последние модификации боевых машин и танков дополнительно включают индикаторный планшет, формирователь, распределительную коробку и координатор цели.
Состав всего комплекта навигационной аппаратуры зависит от типа и предназначения боевой машины. В состав вспомогательных приборов и инструментов обычно входят перископическая артиллерийская буссоль, визир ориентирования, хордоугломер и циркуль-измеритель.
Гирокурсоуказатель, пульт управления и преобразователь тока образуют курсовую систему.
Гирокурсоуказатель предназначен для выдерживания заданного направления и выдачи информации об изменении азимута (дирекционного угла) продольной оси машины в движении.
Пульт управления предназначен для настройки курсовой системы. Имеет два потенциометра азимутальной коррекции для широтной балансировки гирокурсоуказателя.

Рисунок 3.7 – Принципиальная схема навигационной аппаратуры
с координатором
Преобразователь тока служит для преобразования постоянного тока в переменный трехфазный ток для питания гирокурсоуказателя, пульта управления и счетно-решающего устройства.
Датчик пути представляет собой электромеханический прибор, соединенный с ходовой частью боевой машины гибким валиком. Энергия механического вращения валика при движении машины превращается в электрические сигналы, которые поступают в координатор. Таким образом, датчик пути непрерывно определяет величину пройденного пути (расстояние) и передает ее в координатор.
На величину пути, показываемую датчиком, влияют рельеф местности и дорожные условия. Движение машины по крутым склонам, пробуксовка или скольжение колес (гусениц) по грунту, отклонение давления в шинах колес (натяжения гусениц) от нормального и ряд других причин приводят к тому, что путь, показываемый датчиком, не соответствует действительному расстоянию, проходимому машиной. Поэтому, чтобы получить действительное значение пути, пройденного машиной, в показания датчика пути вводят поправку – коэффициент корректуры пути.
В последних модификациях ТНА устанавливают электронный датчик пути, который представляет собой радиотехническое устройство, обеспечивающее определение пройденного машиной пути без кинематической связи с ходовой частью машины. В его состав входят: высокочастотное устройство, станция усиления, пульт управления, преобразователь и датчик крена.
Принцип работы датчика основан на использовании эффекта Доплера, который заключается в изменении частоты сигнала при относительном перемещении источника и приемника излучения. При движении машины вследствие эффекта Доплера частота отраженного от земли сигнала будет отличаться от частоты излучаемого сигнала на некоторую величину, пропорциональную скорости движения машины.
Усиленный сигнал поступает на измеритель доплеровской частоты. С измерителя частоты в схему подается поправка на скорость движения машины, и исправленный сигнал поступает далее в схему учета рельефа местности. В эту же схему от датчика крена поступают данные о рельефе местности (о величине продольного крена машины).
В электронном датчике пути сформированный сигнал о пройденном пути в виде импульсов преобразуется в угол поворота выходного вала датчика, связанного гибким валиком с координатором.
Координатор – счетно-решающий прибор, который по данным, поступающим от датчиков пути и курса, непрерывно вырабатывает прямоугольные координаты местоположения и курс машины, дирекционный угол направления на пункт назначения и дальность до него по приращениям (разностям) координат. Он также служит для проверки функционирования основных узлов навигационной аппаратуры.
Координатор имеет два режима работы – решения навигационных задач в движении и контроля работы в неподвижной машине. Он имеет ряд устройств и шкал, размещенных на лицевой панели прибора (рисунок 3.8), с помощью которых вводятся и считываются прямоугольные координаты, приращения координат, дирекционные углы и значение корректуры пути.
Шкальные механизмы координатора представляют собой счетчики координат барабанного типа. Они позволяют вводить и считывать координаты, выраженные пятизначными числами. Цена одного деления правого барабана в режиме РАБОТА составляет 10 м, в режиме КОНТРОЛЬ – 1 м.
Шкальные механизмы приращений координат представляют собой неподвижные шкалы с ценой деления 10 км и боковых барабанов с ценой деления
200 м. По правому барабану отсчитывают положительные значения приращений координат, а по левому – отрицательные.
Координаты и приращения координат вводят рукояткой установки координат при нажатии на соответствующие тумблеры. Дирекционный угол продольной оси машины устанавливают и считывают с курсовых шкал грубого и точного отсчетов с ценой деления, соответственно, 0-50 и 0-01 делений угломера.
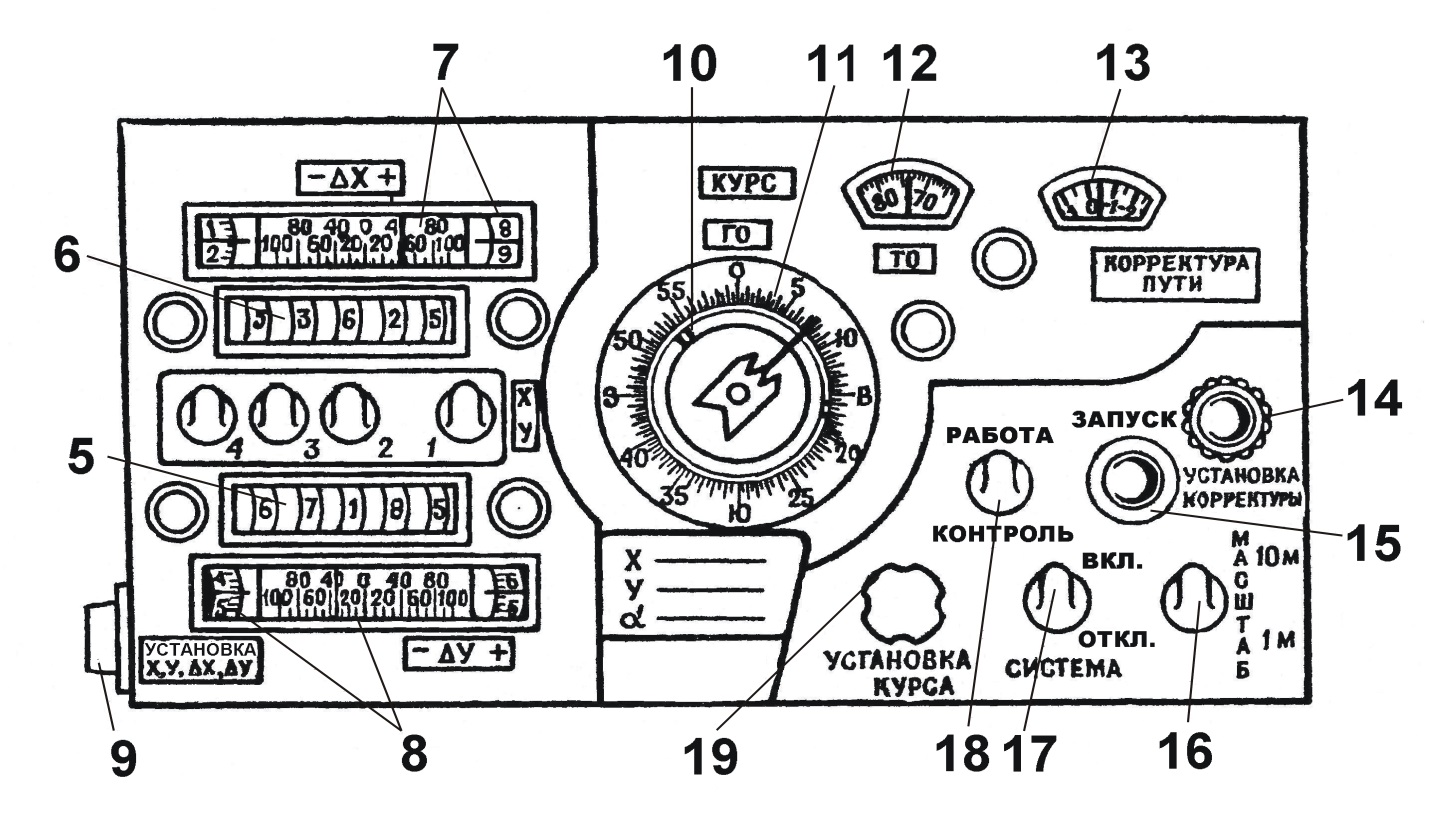
1, 2, 3 – рычажки установки координат X, Y; 4 – рычажок установки приращений координат ΔX, ΔY; 5 – шкала счетчиков координаты Y; 6 – шкала счетчиков координаты X; 7 – шкала приращений координат ΔX; 8 – шкала приращений координат ΔY; 9 – ручка установки координат X, Y, ΔX, ΔY; 10 – указатель курса;
11 – шкала курса грубого отсчета; 12 – шкала курса точного отсчета; 13 – шкала корректуры пути; 14 – ручка установки корректуры пути; 15 – кнопка включения аппаратуры; 16 – переключатель масштабов; 17 – тумблер включения (выключения) аппаратуры; 18 – переключатель работы и контроля аппаратуры; 19 – ручка установки курса
Рисунок 3.8– Лицевая панель координатора
Включение (выключение) координатора производится только в неподвижной машине и, как правило, при работающем двигателе. Спустя 10-13 мин на шкалах координатора устанавливают исходные данные: координаты исходного пункта, приращения координат между исходным пунктом и пунктом назначения, значение корректуры пути и дирекционный угол продольной оси машины.
Указатель курса(курсоуказатель) дублирует показания шкалы грубого отсчета курса (рисунок 3.9). Он устанавливается на приборном щитке перед водителем для вождения машины по заданному курсу.
Для выдерживания заданного курса индекс подвижного кольца 2 устанавливают против соответствующего деления шкалы. При движении по курсу стрелка 3 будет находиться против индекса. Ряд курсоуказателей вместо индекса имеют стрелку, нанесенную на стекле прибора. В этом случае острие стрелки должно указывать нужный отсчет по шкале.
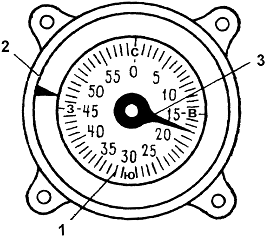
1 – шкала; 2 – индекс подвижного кольца; 3 – стрелка
Рисунок 3.9 – Указатель курса
Индикаторный планшет предназначен для непрерывной индикации (показа) на топографической карте (1:50 000 и 1:100 000) перекрестием визирных нитей местоположения машины и введения поправок в показания счетчиков координатора. В планшет можно поместить сложенную по его размерам склейку из двух-трех листов карты.
Карту (рисунок 3.10) помещают в планшет так, чтобы линии ее координатной сетки совпадали со штрихами измерительных линеек. Северный и южный края карты подгибают так, чтобы можно было точно совместить вертикальные линии сетки карты и планшета и чтобы одновременно были видны подписи километровых линий. Затем, прикладывая карту к планшету, устанавливают, на сколько нужно подогнуть западный или восточный край листа, чтобы укрепить его на планшете пластинчатыми пружинами.
Начальную установку нитей планшета осуществляют после установки исходных координат на шкалах координатора вначале ручкой ввода Х, а затем ручкой ввода Y, чтобы перекрестие нитей совпало с условным знаком исходного пункта маршрута на карте.
Устройство ввода поправок в координаты, вырабатываемые координатором, используется при уточнении местоположения машины на контрольных точках маршрута. Возможность корректировать текущие координаты на шкалах координатора по карте, помещенной на планшете, обеспечивает надежность определения своего местоположения на всем протяжении марша.
Координатор цели вместе с координатором навигационной аппаратуры служит для вычисления прямоугольных координат разведанных целей по измеренному расстоянию до целей и углам визирования на них. Таким образом, координатор цели решает прямую геодезическую задачу.

1 – планшет; 2 – карта; 3 – пружина; 4 – фиксатор
Рисунок 3.10 – Индикаторный планшет с картой
Расстояния до целей измеряются на местности с использованием дальномера, а углы визирования на разведанные цели – с помощью угломерного устройства. Координатор цели используется только в неподвижной машине.
3.3.2 Подготовка карты и танковой навигационной аппаратуры для
ориентирования на местности
Подготовка к ориентированию на местности с помощью навигационной аппаратуры включает: изучение маршрута движения, подготовку рабочей карты, определение исходных данных и начальное ориентирование машины на исходном пункте маршрута.
Прежде чем готовить исходные данные для движения, необходимо заблаговременно изучить по карте (желательно крупного масштаба) местность, условия проходимости, ее защитные и маскировочные свойства и оформить маршрут.
При ориентировании на местности с помощью координатора чаще всего используют карту 1: 100 000 или 1: 200 000. По ней намечают маршрут движения с учетом проходимости местности, ее защитных и маскировочных свойств. Затем оформляют маршрут на карте.
Главным требованием к выбору исходного и конечного пунктов маршрута является их надежность в опознании на карте и местности, удобство наезда на них или подъезда вплотную, а также возможность визирования с них на удаленный ориентир.
Длину маршрута измеряют по топографической карте с использованием курвиметра или циркуля-измерителя. По маршруту выбирают контрольные точки и ориентиры для контроля за работой аппаратуры, определения и введения в аппаратуру необходимых поправок. Первый контрольный ориентир выбирают на удалении 2-3 км от исходного пункта, остальные через 20-30 км. На карте подписывают полные координаты исходного и конечного пунктов маршрута и сокращенные координаты (из пяти цифр) контрольных точек.
Около контрольных точек и на пункте назначения подписывают расстояние от начальной точки нарастающим итогом, а на участках маршрута, где ориентирование затруднено и направление движения придется выдерживать по курсоуказателю, определяют и подписывают дирекционные углы направлений.
Вдоль маршрута целесообразно поднять оцифровку километровых линий. Это дает возможность, не развертывая склейку карт, быстро определять свое местоположение во время марша по значению координат, считываемых со шкал прибора.
Исходными данными для работы с координатором служат:
- географическая широта исходного пункта;
- полные прямоугольные координаты исходного пункта (Xисх, Yисх) и пункта назначения (Xпн, Yпн);
- приращения координат между пунктом назначения и исходным пунктом (ΔХ, Δ Y);
- коэффициент корректуры пути;
- дирекционный угол продольной оси машины.
Координаты исходного и конечного пунктов измеряют по карте 1: 50 000 или крупнее, пользуясь циркулем-измерителем и поперечным масштабом с точностью 0,1 мм в масштабе карты. В некоторых случаях (например, в парках, районах сосредоточения) координаты исходных пунктов определяют заблаговременно от ближайших пунктов ГГС. Координаты пунктов государственной геодезической сети выписывают из каталогов (списков) координат.
Геодезическую широту В определяют по карте и округляют до целого числа градусов.
Разности (приращения) координат определяют по формулам
± D C = Cпн - Cисх;
± D U = Uпн - Uисх.
Их округляют до 0,2 км или до 0,02 км в зависимости от положения переключателя масштаб (10 м или 1 м). При установке величин приращений координат необходимо учитывать их знаки «+» или «–», которые зависят от направления движения.
Коэффициент корректуры пути при движении на равнинной местности по грунтовым дорогам, или по снежной целине, глубиной 15-20 см, для гусеничных машин не превышает 3 %, для колесных машин – 5 %. На холмистой и в горной местности его значение возрастает еще на 2-5 %.
Дирекционный угол направления на пункт назначения измеряют по топографической карте с точностью 0-50. Этот угол используется для контроля работы аппаратуры и ввода в координатор разностей координат.
При большой протяженности маршрута заранее определяют исходные данные для переориентирования машины в районах привалов. Все исходные данные записывают на карте с учетом особенностей ввода их в аппаратуру при начальном ориентировании машины.
Начальное ориентирование машины – определение непосредственно на исходном пункте маршрута дирекционного угла продольной оси машины (курсового угла) и установка на соответствующих шкалах навигационной аппаратуры исходных данных.
Дирекционный угол продольной оси машины на исходном пункте в зависимости от обстановки определяют:
- по крупномасштабной топографической карте;
- с помощью перископической артиллерийской буссоли;
- из астрономических наблюдений по азимутальной насадки буссоли;
- с помощью гирокомпаса;
- по данным каталога (списка) координат геодезических пунктов;
- по карте геодезических данных.
Исходным дирекционным углом называется угол в исходной точке между северным направлением вертикальной линии километровой сетки карты и продольной осью машины. Если машина на исходном пункте установлена так, что ее продольная ось совпадает с направлением на выбранный ориентир, то исходный дирекционный угол α исх будет равен дирекционному углу направления на ориентир α op, который предварительно измерен по карте. Но установить машину на исходном пункте так, чтобы она была направлена на ориентир, достаточно трудно. К тому же очень редко направление на ориентир совпадает с направлением движения машины.
По карте исходный дирекционный угол определяют при наличии на местности удаленного ориентира, видимого с исходного пункта и изображенного на карте внемасштабным условным знаком. Ориентир и исходный пункт должны располагаться на одном листе карты на удалении друг от друга не менее чем
на 3 см.
Предварительно по карте определяют дирекционный угол с исходного пункта на ориентир α ор с наиболее возможной точностью, применяя хордоугломер с циркулем-измерителем или артиллерийский круг.
Машину устанавливают на исходный пункт так, чтобы угломерное устройство машины находилось над исходной точкой, или подъезжают к исходному пункту вплотную. В последнем случае машину устанавливают точно в створе с ориентиром.
Установив машину, с помощью башенного угломера измеряют по ходу часовой стрелки угол визирования β между продольной осью машину и направлением на ориентир. Исходный дирекционный угол определяют по формуле
αисх = αор – β при αор > β
или
αисх = 60-00 + αор – β при αор < β
Схема направлений и углов при начальном ориентировании машины по карте показана на рисунке 3.11, а.
Для контроля исходный дирекционный угол рекомендуется определять по двум ориентирам и брать среднее значение. Если дирекционные углы отличаются более чем на 0-10, следует повторить все измерения и вычисления.
По артиллерийской буссоли исходный дирекционный угол определяют на закрытой местности, на местности, где в районе исходного пункта маршрута отсутствуют удаленные ориентиры, а также при подготовке аппаратуры к работе ночью и в условиях ограниченной видимости.
Для определения исходного дирекционного угла продольной оси машины с помощью перископической артиллерийской буссоли, входящей в комплект навигационной аппаратуры, необходимо:
- установить машину на исходный пункт, а буссоль на расстоянии не менее 50 м от машины с соблюдением правил установки прибора и сориентировать буссоль по магнитной стрелке;
- навести вертикальную нить трубы буссоли на центр оптического визира угломерного устройства машины и снять отсчет по буссольному кольцу и барабану (то есть измерить Ам), повторить эти действия три раза и вычислить среднее значение из трех измерений;
- угломерным устройством машины три раза измерить уголнацентр буссоли β и вычислить среднее значение угла визирования (рисунок 3.11, б).
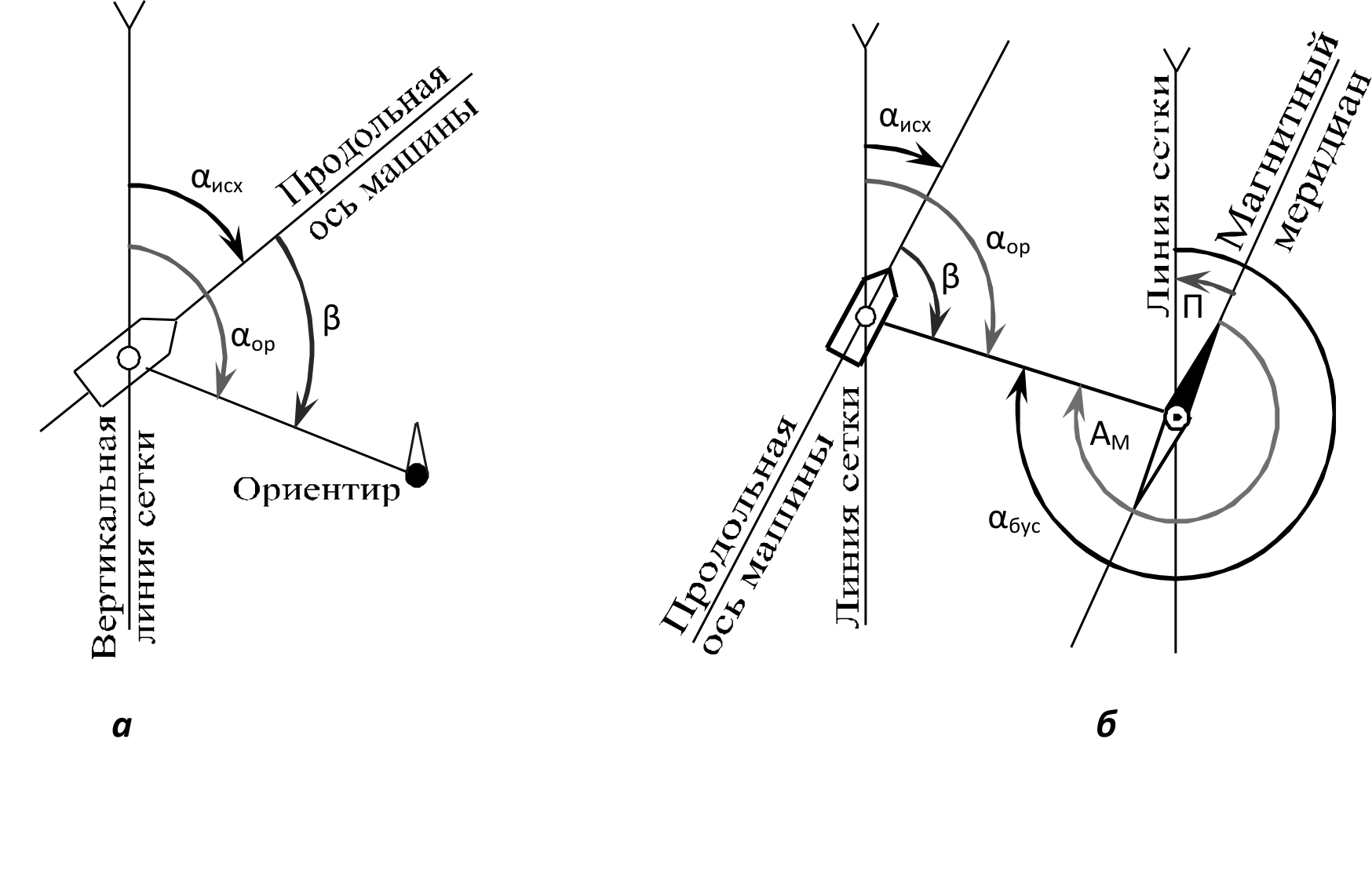
а – по карте; б – по буссоли
Рисунок 3.11 – Определение исходного дирекционного угла
Исходный дирекционный угол продольной оси машины вычисляют по формуле
αисх = Ам + (± ПН) + (± 30-00) – β,
где ПН – поправка направления, равная алгебраической разности магнитного склонения δ и сближения меридианов g. ПН = (± δ) – (±g).
Поправка направления ПН (в тысячных) берется с карты с учетом года издания карты и годового изменения склонения.
Угол 30-00 вводят в формулу со знаком «+» при Ам < 30-00, в противном случае – со знаком «–».
Точность определения αисх этим способом составляет около 0-06.
Для контроля и повышения точности определения исходного дирекционного угла переставляют буссоль на новое место и с него повторно выполняют все действия. Расхождение между двумя вычислениями не должно превышать 0-05. За окончательный результат принимают среднее значение.
Широту и долготу точки определяют по карте с точностью до 1′, а долготу осевого меридиана по известной формуле Lо = 6 ° N – 3 °.
Ввод исходных данных в координатор осуществляют через установленное в паспорте ННА время после включения аппаратуры (в зависимости от модификации аппаратуры ≈ 10 мин). Перед вводом данных переключатели РАБОТА-КОНТРОЛЬ и МАСШТАБ устанавливают соответственно в положение РАБОТА и 10 м.
Начальные координаты Хисх и Yисх, выраженные пятизначными цифрами, устанавливают на шкалах координат поразрядно, начиная с младшего разряда, последовательным воздействием на рычажки 1, 2, 3 и рукоятку установки 9. На рисунке 3.8 значение координаты Y = 671 850.
Значения приращений (разностей) координат пункта назначения и исходного пункта устанавливают по шкалам DХ, DY и по боковым барабанам. Установку производят также рукояткой 9. При вводе значений приращений координат автоматически поворачивается индекс указателя курса на пункт назначения. На рисунке 3.8 отсчет курсового угла по этому индексу после ввода DХ и DY составляет 54-00.
На курсоуказателе у водителя поворотом подвижного индекса устанавливают значение дирекционного угла курса с начального на конечный пункт маршрута.
После этого уточняют установку значения широты на шкале ШИРОТА пульта управления. Затем ручкой 14 устанавливают значение корректуры пути.
Исходный дирекционный угол продольной оси машины (курс) вводят в координатор вращением ручки 19 установки курса. Отсчет ведут вначале по шкале грубого отсчета курса, а затем по шкале точного отсчета курса (курс ГО и ТО). На рисунке 3.8 установлен дирекционный угол αисх = 7-74 (по шкале грубого отсчета 7, по шкале точного отсчета 74). Установку курса целесообразно выполнять непосредственно перед началом движения. В таком случае уход главной оси гироскопа во время стоянки машины не окажет влияния на точность работы координатора.
Начальное ориентирование машины и ввод исходных данных в координатор могут выполняться раздельно.
При подготовке ТНА к работе военнослужащие в составе экипажа (расчета) выполняют норматив № 15 по Военной топографии.
Норматив № 15 «Подготовка исходных данных и координатора к ориентированию на местности (для привязки элементов боевых порядков)»
Рабочая карта подготовлена к совершению марша. Запустить систему. Определить координаты местоположения машины, пункта назначения и контрольных пунктов, широту места, рассчитать приращения координат. Определить дирекционный угол продольной оси машины с помощью буссоли (по карте). Ввести исходные данные в координатор.
Ошибка в определении координат не должна превышать 0,5 мм в масштабе карты, дирекционного угла – 0-03.
Время на выполнение норматива отсчитывается от момента окончания постановки задачи до доклада о готовности к движению:
| Время на выполнение норматива
|
|
| Отлично
| Хорошо
| Удовлетворительно
|
| днем
| 13 мин
| 14 мин
| 15 мин
|
| ночью
| 15 мин
| 16 мин
| 17 мин
|
3.3.3 Выдерживание маршрута и использование навигационной аппаратуры с координатором в боевой обстановке
Аппаратура с координатором допускает работу с заданной точностью без переориентирования машины в течение 7 ч. Разности координат до пункта назначения не должны быть более 100 км. Если пункт назначения находится от исходного пункта на расстоянии более 100 км, выбирают промежуточные пункты назначения.
В сложных условиях ориентирования, когда машину ведут по указателю курса, карту ориентируют преимущественно по курсовому углу. Для этого на карте мысленно или с помощью карандаша проводят направление, дирекционный угол которого соответствует курсу машины (рисунок 3.13), карту поворачивают так, чтобы это направление было параллельно продольной оси машины. При движении с большой скоростью осуществляют грубую (общую) ориентировку и примерное направление движения по шкале КУРС.
h AH2P0CjEAAAA3AAAAA8AAABkcnMvZG93bnJldi54bWxEj8FqwzAQRO+F/oPYQG+N5JaU4kQJpjRQ ekgaNx+wWBvbxFoZSY3cv48KhRyHmXnDrDaTHcSFfOgdayjmCgRx40zPrYbj9/bxFUSIyAYHx6Th lwJs1vd3KyyNS3ygSx1bkSEcStTQxTiWUoamI4th7kbi7J2ctxiz9K00HlOG20E+KfUiLfacFzoc 6a2j5lz/WA2qTnZX7LFKC6w+iy//ns5bpfXDbKqWICJN8Rb+b38YDc9qAX9n8hGQ6ysAAAD//wMA UEsBAi0AFAAGAAgAAAAhAASrOV4AAQAA5gEAABMAAAAAAAAAAAAAAAAAAAAAAFtDb250ZW50X1R5 cGVzXS54bWxQSwECLQAUAAYACAAAACEACMMYpNQAAACTAQAACwAAAAAAAAAAAAAAAAAxAQAAX3Jl bHMvLnJlbHNQSwECLQAUAAYACAAAACEAMy8FnkEAAAA5AAAAEgAAAAAAAAAAAAAAAAAuAgAAZHJz L3BpY3R1cmV4bWwueG1sUEsBAi0AFAAGAAgAAAAhAH2P0CjEAAAA3AAAAA8AAAAAAAAAAAAAAAAA nwIAAGRycy9kb3ducmV2LnhtbFBLBQYAAAAABAAEAPcAAACQAwAAAAA= "> 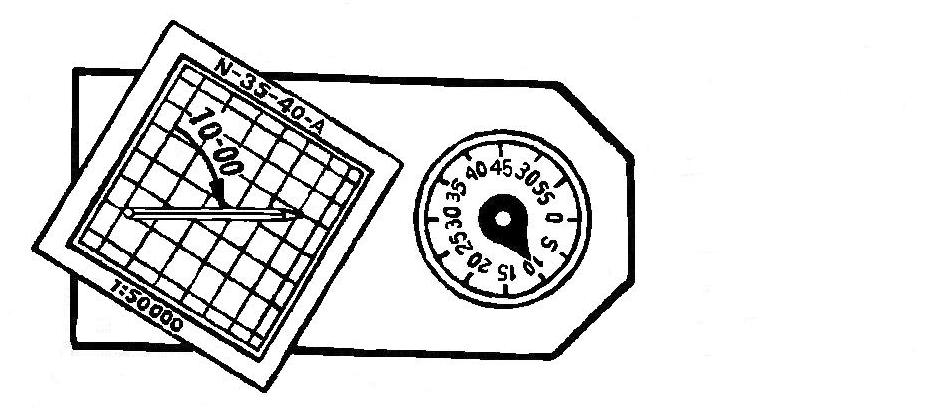
Рисунок 3.13 – Ориентирование карты по указателю курса
По мере удаления от исходного пункта в показаниях счетчиков координат накапливаются ошибки в основном из-за отклонения главной оси гироскопа от первоначального положения. Величина такого отклонения за 1 ч работы обычно не превышает 0-30, что может вызвать ошибку в координатах 0,5 км на 25-30 км пути.
Величина отклонения по азимуту в основном зависит от точности определения и ввода дирекционного угла продольной оси машины при первоначальном ее ориентировании, от ошибок, допущенных при широтной балансировке гироскопа, а также от времени движения.
На отклонение по дальности в основном влияют ошибки в определении корректуры пути. На величину ошибки оказывают влияние и неточности, допущенные при подготовке исходных данных. Поэтому в пути на контрольных точках маршрута проверяют правильность работы аппаратуры, периодически уточняют ориентировку и вводят поправки в показания счетчика координатора.
На первой контрольной точке маршрута необходимо убедиться в правильности работы аппаратуры. С этой целью сравнивают значения координат, считанных со шкал координатора, с подписанными на карте. Расхождение не должно превышать 1 мм в масштабе карты. Если это условие не выполняется, то в координатор вводят величины координат, подписанные на карте и у ближайшего ориентира (через 2-3 км пути), вновь сличают координаты, снятые с карты и с аппаратуры.
При значительном расхождении этих величин машину необходимо переориентировать.
После введения поправок в курс и корректуру пути на шкалах координатора устанавливают координаты контрольного ориентира, определенные по карте, и продолжают движение. В движении допускается изменять отсчеты только по шкале корректура пути. При необходимости изменения отсчетов на других шкалах координатора машину останавливают.
Ориентирование карты в машине выполняется в следующей последовательности:
- по координатам, считанным со шкал координатора, наносят на карту точку своего местоположения;
- по отсчетам, снятым со шкалы курс, от точки мысленно или карандашом проводят направление движения машины;
- карту ориентируют таким образом, чтобы направление движения было параллельно продольной оси машины.
На участке маршрута, где меняются дорожные условия, например, при сходе с шоссе на грунтовую дорогу, на шкале корректура пути изменяют отсчет, увеличивая значение корректуры с отрицательным знаком.
Особенности применения навигационной аппаратуры на стыке координатных зон. На маршруте, пересекающем стык смежных зон, использование координатора усложняется, так как навигационная аппаратура позволяет определять координаты и курс машины только в пределах одной координатной зоны. В тех случаях, когда маршрут движения проходит по разным координатным зонам, необходимо переориентировать машину или нанести координатную сетку на соседний лист карты по выходам линий сетки смежной зоны.
При переориентировании машины определяют и устанавливают на шкалах новые координаты и разности координат в системе координат рабочей зоны, на шкалах КУРС – новое значение дирекционного угла.
Топогеодезическая привязка элементов боевого порядка на местности, бедной ориентирами, где точное определение своего местоположения по карте затруднено, может быть выполнена с помощью координатора. Она заключается в определении координат и высот элементов боевого порядка, а также дирекционных углов ориентирных направлений.
При ведении разведки и в ряде других случаев координатор может использоваться для нанесения целей на карту и целеуказания. Обнаружив цель, делают короткую остановку и наводят визирное устройство на цель. Затем записывают курс со шкал ГО и ТО, измеряют и записывают дальность до цели и угол визирования на нее. Угол визирования переводят в дирекционный угол цели. По координатам со шкал координатора наносят точку стояния машины на карту, а по дирекционному углу и дальности – местоположение цели. Снятые с карты координаты цели передают по средствам связи.
При наличии в навигационной аппаратуре координатора цели, измеренные угол визирования на цель и расстояние до нее вводят в координатор цели. Со счетчиков Х и Y считывают и передают по средствам связи координаты цели или наносят цель на карту по координатам.
Для нанесения на карту не обозначенных на ней объектов, например, колонного пути, с включенным координатором проезжают по объекту или по его контуру, делая короткие остановки на точках поворота колонного пути. Затем наносят эти точки на карту по координатам, считанным со счетчиков координатора, и соединяют их карандашом с учетом небольших изгибов пути на местности.
Таким же образом наносят границы зон заражения, крупных инженерных сооружений или боевые порядки подразделений в обороне (достигнутые рубежи в ходе наступления). Отдельные объекты и ориентиры наносят на карту так же, как и цели.
Навигационная аппаратура с координатором может использоваться и при управлении подразделениями на марше, выходе их на рубежи развертывания, перехода в атаку, а также для быстрого сосредоточения огня подразделения по наиболее важным целям.
Особенности современной танковой навигационной аппаратуры обусловлены введением в ее состав двух новых приборов индикаторного планшета и координатора цели, а в гирокурсоуказатель системы автоподстройки. Это существенно повышает надежность ориентирования на местности и сводит до минимума отличия между танковой навигационной аппаратуры и навигационной аппаратурой с курсопрокладчиком, установленной на топопривязчиках и на отдельных видах боевых разведывательных машин.








