Применение нечеткого ПИД регулятора для управления двигателем постоянного тока
Принцип построения ПИД регулятора на нечеткой логике.
В качестве базовой структуры, формирующей сигнал управления для САУ, выбран пропорционально-интегрирующий-дифференцирующий регулятор (ПИД-регулятор).
Схема ПИД-регулятора на нечеткой логике показана на рисунке 2.9. Как видно из этой схемы, сигнал, подаваемый на силовую часть цепи складывается из пропорциональной, интегральной и дифференциальной частей. Причем каждая из этих частей регулируется с помощью применения нечеткой логики в зависимости от двух входных переменных нечеткого блока: ошибки и производной от ошибки.
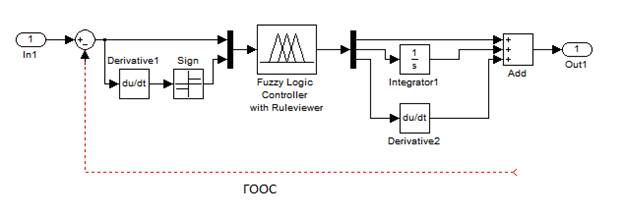
Рис. 2.9.
Структура и принцип работы ПИД-контроллера.
Пропорциональная составляющая является основой регулирующего воздействия для рассмотренного ПИД-регулятора.
Коэффициент усиления регулятора определяется величиной ООС. Если ООС выключена, коэффициент усиления регулятора максимальный.
ООС может быть временно и в разной степени заблокирована, в зависимости от скорости изменения регулируемой величины. Это свойство обратной связи используется при создании ПД- и ПИД-регуляторов. Для настройки регуляторов вводится дополнительный параметр, - постоянная времени дифференцирования Т d.
В ПИ- и ПИД-регуляторы добавлена ПОС, скорость изменения которой задается постоянной времени интегрирования Т i. На протяжении переходного процесса ПОС постепенно выключает действие ООС и устанавливает регулятор в режим пропорционального регулирования с минимальной РВ.
ООС и ПОС называются гибкими обратными связями. Применяется еще одно название, - изодромные обратные связи (от греч. isos - равный и dromos - бег). Отсюда название регулятора, - изодромный.
Переходной процесс в САР с ПИД-регулятором возможно ускорить:
- уменьшая величину ООС;
- уменьшая скорость изменения ООС;
- увеличивая скорость изменения ПОС.
Улучшая временную характеристику переходного процесса, вместе с тем снижаем устойчивость системы автоматического регулирования.
ПИД-регуляторы целесообразно применять в САР с большой инерцией. В качестве примеров таких систем можно назвать:
- бак (емкость), в который для заметного изменение уровня требуется налить или вылить большой объем жидкости;
- теплообменник, в котором внутренний теплообмен протекает медленно и датчик температуры работает с запаздыванием.
Воплощение различных структурных схем регуляторов значительно упростилось с появлением ПИД-регуляторов на базе микропроцессоров.
Как правило, в таких регуляторах сигнал рассогласования одновременно подается на параллельные ветви, формирующие пропорциональную, интегральную и дифференциальную составляющие, которые затем суммируются и усиливаются. Т.е. каждую ветвь возможно рассматривать как отдельный регулятор. Благодаря независимой работе, интегральная составляющая к концу переходного процесса полностью замещает пропорциональную составляющую.
Несмотря на все многообразие выпускаемых ПИД-регуляторов, принцип их действия остается неизменным. Рис. 2.10. - структурная схема для анализа в пакете Simulink.

Рис. 2.10.
Переходная характеристика 1
Значение пропорциональной части очень велико при небольших ошибках, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Пропорциональную часть следует уменьшить при небольших маленьких и средних значениях ошибки. При этом надо иметь в виду, что варьировать пропорциональную компоненту можно следующими способами:
1) Изменять пределы, форму функций пренадлежности переменной errs, чтобы увеличить значения переменной errs пренадлежищие функциям пренадлежности охватывающих малые значения ошибки.
2) Изменять пределы, форму функций пренадлежности пропорциональной части K, чтобы уменьшить ее при небольших значениях errs;
3) Изменять правила, чтобы средним значениям errs соответствовали маленькие K (напомню, что первоначально средним errs соответствовали средние K);
Переходная характеристика 2
Для этой кривой характерны затухающие колебания (3-5 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение коэффициента пропорциональности является оптимальным. Для этого случая настройка пропорциональной компонентысчитается законченной.
Если дифференциальная компонента использоваться не будет, то рекомендуется еще уменьшить K так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика 3
В этой переходной характеристике имеет место небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы при переходе с одной уставки на другую или при резком изменении нагрузок, например, при изменении расхода пара.
Выбросы можно устранить дополнительным уменьшением K так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика 4
Регулируемый параметр плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика 5
Сильно затянутый подход к установившемуся значению говорит о том, что пропорциональная часть чрезмерно занижена. Динамическая и статическая точность регулирования здесь мала. Рекомендуется увеличить значение K. Сделать это можно методами, противоположными предложенным в случае переходной характеристики 1.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение параметра в системе не совпадает со значением уставки. Чем меньше пропорциональная часть, тем больше остаточное рассогласование. Однако остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), минимизируется интегральной компонентой регулятора (ПИ-регулятор).
Во-вторых, чем меньше пропорциональная часть, тем больше длительность переходных процессов. Однако, следует иметь ввиду реальные параметры систем регулирования, например в нашем случае, максимальное среднее напряжение которое мы физически сможем подать на двигатель – это 24В. Поэтому существует физический предел настройки длительности переходных процессов, уменьшить которую без изменения аппаратной части уже не возможно.
Выводы:
1. Во всех рассмотренных выше случаях установившееся значение параметра в системе не совпадает со значением уставки. Чем меньше пропорциональная часть, тем больше остаточное рассогласование.
2. Чем меньше пропорциональная часть, тем больше длительность переходных процессов.
3. Остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П -регуляторов), минимизируется интегральной компонентой регулятора (ПИ-регулятор).
На данном этапе настраиваем третий тип характеристики, сохраняем полученные правила, термы и их функции пренадлежности и приступаем к этапу №2. Все данные приведены в графической части.
Рис. 2. 13.
1. Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор.
2. Предположим, что на этапе 1 настроена пропорциональная часть, соответствующая переходной характеристике типа 1 показанной на рис. 2.13, в которой присутствуют затухающие колебания. В этом случае следует так настроить дифференциальную часть, чтобы переходная характеристика имела вид кривой 2 на рис. 2.13. А если пропорциональная часть настроена как на характеристике типа 2, следует так настроить дифференциальную часть, чтобы переходная характеристика имела вид кривой 3. И так далее.
3. Мы настраиваем нашу систему по второму варианту, из-за требований по перерегулированию. На этом этапе начинаем учет не только значений входной переменной errs, но и znu – знака производной от ошибки errs. znu помогает нам учесть динамику ошибки, растет она, уменьшается или неизменна и дает возможность лучше настроить систему.
4. В нашем случае входная переменная znu имеет 3 функции принадлежности, поэтому для ее учета в общем случае требуется 5*3=15 правил (5- число функций пренадлежности входной переменной errs; а 3, соответственно, znu). Иногда число правил может быть уменьшено из-за того что нет необходимости учитывать некоторые комбинации функций принадлежности входных переменных.
5. Настройку пропорциональной составляющей необходимо производить так, чтобы при больших ошибках она была минимальна и не мешала системе быстро реагировать на изменение, а при малых ошибках наоборот, гасила колебания, т.е. была существенной и приводили переходной процесс к необходимому нам виду.
Вывод: Дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику более оптимальной. Это значит, что динамическая точность регулирования при наличии дифференциальной компоненты (ПД -регулятор) может быть выше, чем для П -регулятора.
Настраиваем систему под 4 тип как на рисунке 2.12. Все полученные настройки приведены в графической части.
Рис. 2.14
Возможные варианты кривых приведены на рис. 2.14.
Переходная характеристика 2
Такая кривая получается при чрезмерно большой величине интегральной части. Выход на уставку оказывается затянутым. В этом случае рекомендуется уменьшить влияние интегральной части при малых ошибках. С помощью изменения ее функций принадлежности или правил.
Переходная характеристика 4
Получается при слишком малой величине интегральной части. Выход на уставку также длится долго. Если интегральной части уменьшить еще, то в системе могут возникнуть колебания. Следует увеличить значение интегральной части методами, противоположными методам в случае переходной характеристики №2.
Переходная характеристика 3
Значение интегральной части выбрано оптимально.
Вывод: Интегральная компонента позволяет минимизировать остаточное рассогласование между установившимся в системе значением регулируемого параметра и уставкой.

Рис. 2.15.
График переходного процесса системы с нечетким ПИД регулятором в тяжелом режиме, соответствующем максимальному углу переброски показан на Рис 2.15.
Переходный процесс исходной и полученной системы представлены на рис. 2.8 и 2.15 соответственно. По графику на рис. 2.15 оценим параметры полученного переходного процесса:
Перерегулирование:
Величина перерегулирования для САУ с регулятором составляет:

Эта величина больше перерегулирования для системы без регулятора. Это обусловлено тем, что регулятор изначально проектировался для уменьшения времени переходного процесса системы. Как видно из сравнения этих величин – результат достигнут.
Время переходного процесса:
Из оценки графика на рис. 11 видно, что время переходного процесса уменьшилось и составляет величину:

Уменьшение этой величины являлось основной задачей использования ПИД контроллера.
Нетрудно видеть, что введение в систему регулятора позволило достаточно сильно улучшить качество переходного процесса, а, вместе с тем, и всего процесса управления системой.
Агрегирование подусловий
Агрегирование представляет собой процедуру определения степени истинности  по каждому из правил базы знаний системы нечеткого вывода. В случае, если правило состоит из одного условия, то степень его истинности равна значению степени истинности
по каждому из правил базы знаний системы нечеткого вывода. В случае, если правило состоит из одного условия, то степень его истинности равна значению степени истинности  входящего в такое условие терма.
входящего в такое условие терма.
Если же правило состоит из нескольких условий, то степень истинности такого сложного правила определяется на основе известных значений истинности подусловий.
Так, для операции нечеткой конъюнкции (операции «И») двух термов  и
и  используется известная формула:
используется известная формула:

Например, для правила:
ЕСЛИ (E= XS И znu= Negative ) ТОГДА K= ESmall
при значениях сигналов E=0.1 и znu=-1 его степень истинности:

Активизация подзаключений
Активизация представляет собой процесс нахождения степени истинности каждого из подзаключений правил нечеткой базы знаний. Поскольку в проектируемой системе не вводятся весовые коэффициенты ни для каждого из подзаключений, ни для правил в целом, то степени истинности каждого из подзаключений будут равны степеням истинности соответствующего правила, т.е.  .
.
После определения всех коэффициентов  по каждому из подзаключений, определяются функции принадлежности для каждого из этих подзаключений для выходных лингвистических переменных на основании какого-либо метода нечеткой композиции.
по каждому из подзаключений, определяются функции принадлежности для каждого из этих подзаключений для выходных лингвистических переменных на основании какого-либо метода нечеткой композиции.
Для проектируемой системы, по мнению авторов, наиболее целесообразно применить метод так называемой min-активизации, согласно которому функции принадлежности  для термов
для термов  выходных лингвистических переменных определяются по формуле:
выходных лингвистических переменных определяются по формуле:

здесь – четкое значение выходного сигнала, а  – его функция принадлежности (см. п. 2.3.4 выше).
– его функция принадлежности (см. п. 2.3.4 выше).
Например, когда одновременно два терма имеют не нулевую функцию принадлежности, функции принадлежности после активизации для термов

и

некой выходной лингвистической переменной будут иметь вид, показанный на рис. 2.29 и рис. 2.30.
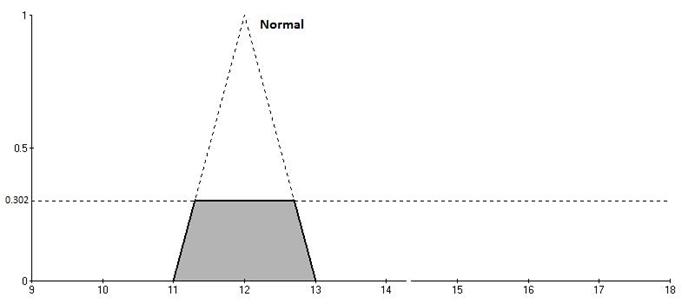
Рис. 2.29.
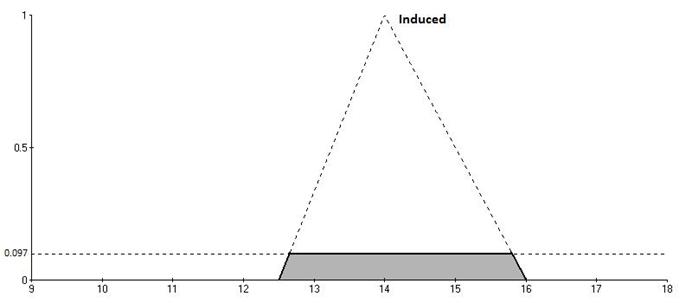
Рис. 2.30.
Аккумуляция заключений
Цель аккумуляции заключается в объединении всех степеней истинности заключений и подзаключений для получения функций принадлежности каждой из выходных лингвистических переменных.
Причина необходимости этого этапа состоит в том, что подзаключения, относящиеся к одной и той же лингвистической переменной могут принадлежать различным правилам нечеткой базы знаний контроллера.
При выполнении этой процедуры последовательно рассматриваются все выходные лингвистические переменные. На основании полученных в результате активизации коэффициентов по каждому из подзаключений для этой переменной (т.е. фактически, на основании известных функций принадлежности ) формируется функция принадлежности всей выходной лингвистической переменной в целом. Формирование этой функции происходит как объединение функций принадлежности для подзаключений, относящихся к данной рассматриваемой лингвистической переменной:


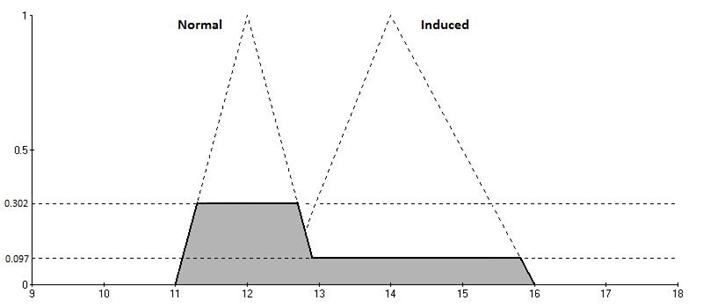
Например, для рассмотренного выше случая функция принадлежности некой лингвистической переменной после аккумуляции будет иметь вид, показанный на рис. 2.31.
Рис. 2.31.
Таким образом, формируется программа нечеткого логического вывода.
В результате последующей процедуры дефазификации на основании полученной функции принадлежности формируется выходной четкий сигнал.
Дефаззификация выходных лингвистических переменных
Как уже упоминалось ранее в п. 3.4.2, цель дефаззификации заключается в том, чтобы, используя результаты аккумуляции всех выходных лингвистических переменных, получить обычное, четкое количественное значение  выходных переменных в виде обычных сигналов, которые могут быть использованы устройствами, внешними по отношению к нечеткой логике.
выходных переменных в виде обычных сигналов, которые могут быть использованы устройствами, внешними по отношению к нечеткой логике.
Для выполнения процедуры дефаззификации применяются различные методы (так называемые методы приведения к четкости). Для целей нашей работы, наиболее целесообразным авторы считают применение так называемого метода центра тяжести (Centre of Gravity, CoG), согласно которому значение выходного сигнала определяется по формуле [1]:
в приведенной формуле оба интеграла вычисляются на интервале, где функция принадлежности  отлична от нуля.
отлична от нуля.
Полученный алгоритм работы системы нечеткого логического вывода достаточно часто применяется в контроллерах на нечеткой логике и носит названия «алгоритм Мамдани» в честь его разработчика, английского математика E. Mamdani.
1 здесь и далее и применяются для обозначения соответственно входных и выходных сигналов и лингвистических переменных, а и – для обозначения термов входных и выходных лингвистических переменных соответственно.
Применение нечеткого ПИД регулятора для управления двигателем постоянного тока