Сигнал широтно-импульсной модуляции (ШИМ), вырабатываемый ПИД-регулятором, определяется тремя компонентами:
| K
| пропорциональная часть
| Настройка (1 этап)
|
| Kd
| Дифференциальная часть
| Настройка (2 этап)
|
| Ki
| Интегральная часть
| Настройка (3 этап)
|
Так как коэффициенты ПИД регулятора меняются по нечеткой логике в зависимости от значений входных переменных, тонастройка ПИД регулятора по сути сводится к настройке термов и базы знаний нечеткой логики. Но при этом оценка качества настройки нечеткой логики производится по характеристике переходного процесса на управляющее воздействие, как и в обычном ПИД-регуляторе. Но отличительной особенностью настройки нечеткого ПИД-регулятора является то, что в качестве управляющего воздествия при оценке качества необходимо брать максимальное, так как это самый тяжелый случай для всей системы и только по нему можно оценить реальное качество.
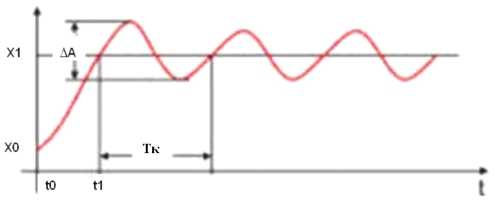
Рис. 2.11.
Этап 1. Настройка пропорциональной компоненты ПИД-регулятора
Перед настройкой пропорциональной компоненты регулятора интегральная и дифференциальная компоненты отключаются.
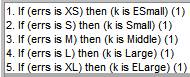
1. Устанавливают первоначальные значения функций пренадлежности пропорциональной компоненты и блок правил так, чтобы каждой функции пренадлежности переменной errs (ошибка) соответствовала своя функция пренадлежности K (пропорциональная составляющая ПИД регулятора). Причем большим значениям ошибки должен соответствовать максимальная пропорциональная часть. Экспериментально снимается и регистрируется при помощи программы характеристика переходного процесса. В нашем случае на этом этапе получаем следующие правила:
2. Возможные варианты кривых переходной характеристики приведены на рис. 2.12.

Рис. 2.12.
Переходная характеристика 1
Значение пропорциональной части очень велико при небольших ошибках, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Пропорциональную часть следует уменьшить при небольших маленьких и средних значениях ошибки. При этом надо иметь в виду, что варьировать пропорциональную компоненту можно следующими способами:
1) Изменять пределы, форму функций пренадлежности переменной errs, чтобы увеличить значения переменной errs пренадлежищие функциям пренадлежности охватывающих малые значения ошибки.
2) Изменять пределы, форму функций пренадлежности пропорциональной части K, чтобы уменьшить ее при небольших значениях errs;
3) Изменять правила, чтобы средним значениям errs соответствовали маленькие K (напомню, что первоначально средним errs соответствовали средние K);
Переходная характеристика 2
Для этой кривой характерны затухающие колебания (3-5 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение коэффициента пропорциональности является оптимальным. Для этого случая настройка пропорциональной компонентысчитается законченной.
Если дифференциальная компонента использоваться не будет, то рекомендуется еще уменьшить K так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика 3
В этой переходной характеристике имеет место небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы при переходе с одной уставки на другую или при резком изменении нагрузок, например, при изменении расхода пара.
Выбросы можно устранить дополнительным уменьшением K так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика 4
Регулируемый параметр плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика 5
Сильно затянутый подход к установившемуся значению говорит о том, что пропорциональная часть чрезмерно занижена. Динамическая и статическая точность регулирования здесь мала. Рекомендуется увеличить значение K. Сделать это можно методами, противоположными предложенным в случае переходной характеристики 1.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение параметра в системе не совпадает со значением уставки. Чем меньше пропорциональная часть, тем больше остаточное рассогласование. Однако остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), минимизируется интегральной компонентой регулятора (ПИ-регулятор).
Во-вторых, чем меньше пропорциональная часть, тем больше длительность переходных процессов. Однако, следует иметь ввиду реальные параметры систем регулирования, например в нашем случае, максимальное среднее напряжение которое мы физически сможем подать на двигатель – это 24В. Поэтому существует физический предел настройки длительности переходных процессов, уменьшить которую без изменения аппаратной части уже не возможно.
Выводы:
1. Во всех рассмотренных выше случаях установившееся значение параметра в системе не совпадает со значением уставки. Чем меньше пропорциональная часть, тем больше остаточное рассогласование.
2. Чем меньше пропорциональная часть, тем больше длительность переходных процессов.
3. Остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П -регуляторов), минимизируется интегральной компонентой регулятора (ПИ-регулятор).
На данном этапе настраиваем третий тип характеристики, сохраняем полученные правила, термы и их функции пренадлежности и приступаем к этапу №2. Все данные приведены в графической части.






