Отличие ПИД-регулятора с контроллером на нечеткой логике от обычного заключается в том, что коэффициенты усиления в пропорциональной и интегрирующей цепях регулятора не являются статическими – они зависят от состояния системы в текущий момент времени. Именно это отличие позволяет качественно изменить процесс управления, позволяя учитывать параметры сигналов в системе (скорость изменения сигнала, ускорение), и тем самым сделать процесс управления более адаптивным.
Авторы настоящей работы считают наиболее целесообразным в системе управления двигателем постоянного тока по скорости использовать для выбора коэффициентов усиления в регуляторе следующие параметры системы:
· ошибка по углу вращения выходного вала привода редуктора;
· знак скорости вращения выходного вала привода редуктора;
Структура и принцип работы контроллера на нечеткой логике
В современных системах применяются контроллеры на нечеткой логике, структура которых представлена на рис. 2.21:
Рис. 2.21.
Структура контроллера на нечеткой логике показана на рис. 2.21. Здесь:  – входной четкий вектор сигналов, поступающих на контроллер,
– входной четкий вектор сигналов, поступающих на контроллер,  – входной нечеткий вектор, – выходной нечеткий вектор, – выходной четкий вектор сигналов.
– входной нечеткий вектор, – выходной нечеткий вектор, – выходной четкий вектор сигналов.
Принцип работы контроллера следующий:
1. На вход контроллера поступает необходимое для решения конкретной задачи число входных сигналов (в настоящем проекте – два), образующих входной четкий вектор  1;
1;
2. Происходит процедура фаззификации, т.е. исходя из текущего значения четкого сигнала, на основании известных функций принадлежности каждому сигналу четкого вектора сопоставляется определенный входной терм, образуя, таким образом, входной нечеткий вектор  . Сигналы, входящие в этот вектор именуются лингвистическими переменными;
. Сигналы, входящие в этот вектор именуются лингвистическими переменными;
3. Программа нечеткого логического вывода (FIS-структура) на основании нечеткой базы знаний ставит в соответствие каждому вектору выходной нечеткий вектор  , являющийся результатом нечеткого логического вывода;
, являющийся результатом нечеткого логического вывода;
4. Значениям (термам) лингвистическим переменных, составляющих выходной вектор , на основании функций принадлежности ставятся в соответствие определенные четкие значения сигналов, составляющие выходной четкий вектор  , таким образом, происходит процедура дефазификации;
, таким образом, происходит процедура дефазификации;
5. Сигналы, составляющие вектор , поступают в схему регулятора собственно для реализации самого процесса управления.
Таким образом, первой задачей является определение лингвистических переменных, составление их терм-множеств и функций принадлежности.
Определение логических переменных контроллера и их функций принадлежности
Как было отмечено выше, входными сигналами для контроллера на нечеткой логике являются Е и znu. Применительно к контроллеру эти сигналы являются лингвистическими переменными. Для дальнейшего рассмотрения системы вводятся следующие термы для этих переменных:
Лингвистическая переменная E (ошибка по углу):
Ø очень малая (XS);
Ø малая (S);
Ø средняя(M);
Ø большая (L);
Ø очень большая (XL);
Лингвистическая переменная znu (знак скорости):
Ø отрицательная (Negative);
Ø нулевая (Zero);
Ø положительная (Positive);
В силу функциональной невозможности работы пакета Fuzzy Logic Toolbox с параметрами, подаваемыми в него извне (в частности, с напряжением  ), управление в настоящей курсовой работе будет производиться не переменными коэффициентами напряжения, а непосредственно напряжениями в пропорциональной (
), управление в настоящей курсовой работе будет производиться не переменными коэффициентами напряжения, а непосредственно напряжениями в пропорциональной ( ) и интегрирующей (
) и интегрирующей ( ) цепях, этим и обуславливается допущение о работе двигателя в номинальном режиме (см. Введение). На практике, при программировании микроконтроллера таких проблем не возникает и это допущение снимается.
) цепях, этим и обуславливается допущение о работе двигателя в номинальном режиме (см. Введение). На практике, при программировании микроконтроллера таких проблем не возникает и это допущение снимается.
Для этих выходных лингвистических переменных вводятся следующие термы:
Лингвистическая переменная К (напряжение в пропорциональной цепи):
Ø сильно уменьшенное (ESmall);
Ø несколько уменьшенное (Small);
Ø нормальное (Middle);
Ø несколько увеличенное (Large);
Ø сильно увеличенное (Elarge);
Лингвистическая переменная Ki (напряжение в интегрирующей цепи):
Ø небольшое прямое (Direct);
Ø нулевое (Zero);
Ø небольшое обратное (Inverted);
Лингвистическая переменная Kd (напряжение в дифференцирующей цепи):
Ø нулевое (Zero);
Ø половина (Half);
Ø максимальное (Pic);
Для реализации процедуры фазификации и дефазификации, т.е. «превращения» конкретного числового значения входного сигнала в соответствующий терм и наоборот задаются функции принадлежности для каждой входной и выходной переменных.
Определение функций принадлежности – наиболее трудоемкий процесс, в наибольшей степени определяющий качество процесса управления системой. Так, для составления наиболее адекватной модели требуется не только знание характера поведения системы в целом, но и определенное число экспериментов, позволяющее определить недостатки нечеткой модели и устранить их, и, конечно, некоторый опыт построения таких систем.
В настоящей работе приводятся функции принадлежности уже подвергшиеся экспериментальной оценке и корректировке. Приводить ход этих экспериментов авторы работы считают нецелесообразным. Так, например, для повышения вычислительной способности системы и возможности применения более простых контроллеров функции принадлежности для всех термов выбираются треугольной формы. Применение других форм в данной системе достаточно слабо влияет на результат.
Функции принадлежности для терм-множества лингвистической переменной Е представлены на рис. 2.22 и 2.23 (в увеличенном масштабе).
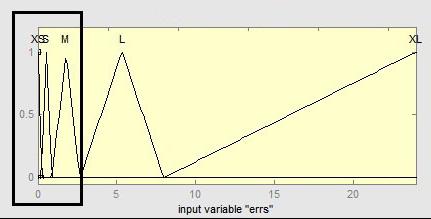
Рис. 2.22.
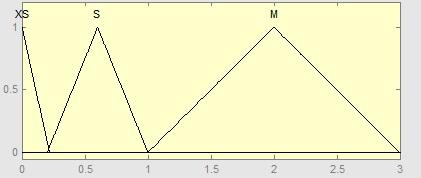
Рис. 2.23.
Термы и функции принадлежности лингвистической переменной znu представлены на рис. 2.24.
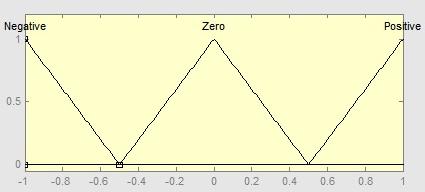
Рис. 2.24.
Функции принадлежности для терм-множества лингвистической переменной K представлены на рис. 2.25.
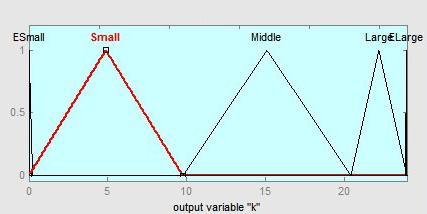
Рис. 2.25.
Функции принадлежности для терм-множества лингвистической переменной Ki представлены на рис. 2.26.
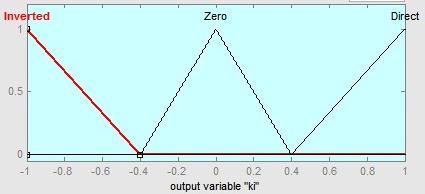
Рис. 2.26.
Функции принадлежности для терм-множества лингвистической переменной Kd представлены на рис. 2.27.
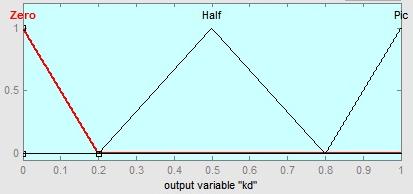
Рис. 2.27.
Таким образом, имеются все необходимые данные для проведения процедур фазификации и дефазификации.
Фазификация входных сигналов
Как уже упоминалось ранее, фазификацией называется процесс нахождения термов (значений функций принадлежности) на основе четких данных.
Так, каждому сигналу на входе в результате фазификации будет поставлена в соответствие логическая переменная в виде некоторого вектора  , где каждый элемент есть степень истинности высказывания « есть
, где каждый элемент есть степень истинности высказывания « есть  ». Для дальнейшего удобства введем для этой цели оператор , такой что:
». Для дальнейшего удобства введем для этой цели оператор , такой что:

Так, например значению ошибки по скорости, равной Е=0,21 соответствует логическая переменная (см. рис. 2.23):

Именно в таком виде каждый из сигналов поступает на дальнейшую обработку в систему нечеткого логического вывода.
Формирование нечеткой базы знаний контроллера
Под нечеткой базой знаний подразумевается совокупность правил «Если – то», определяющих взаимосвязь между входными и выходными лингвистическими переменными контроллера.
В исследуемой системе составляется взаимосвязь между двумя входными (Е и znu) и тремя выходными (K, Ki и Kd) лингвистическими переменными. При формировании нечеткой базы знаний контроллера также проводится ряд экспериментов с целью корректировки функций принадлежности лингвистических переменных.
В самом же контроллере она задается непосредственно совокупностью правил «Если – то» с помощью стандартных функций языков программирования.
Взаимосвязь между входными лингвистическими переменными и выходными лингвистическими переменными показана в таблице 2.2.
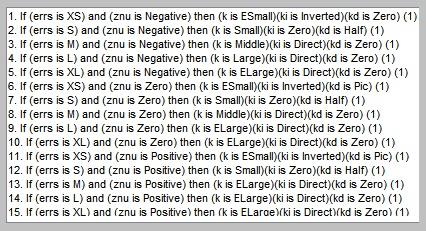
Таблица 2.2.
Исследуя нечеткую базу знаний контроллера (табл. 2.2) и функции принадлежности лингвистических переменных (рис. 2.22 – 2.27) нетрудно видеть, что в контроллере реализуется идея подачи сигнала с регулятора, несколько опережающего происходящие в системе процессы. Так, например, при запуске системы коэффициент усиления в пропорциональной цепи повышается, уменьшая время переходного процесса, а, при приближении сигнала к требуемому значению, резко снижается, уменьшая таким образом перерегулирование в системе.
Составление программы нечеткого логического вывода
Программа нечеткого логического вывода представляет собой некий алгоритм получения нечетких логических заключений, выражающихся в значениях выходных лингвистических переменных. Процедура нечеткого логического вывода происходит на основе нечеткой базы знаний с использованием функций принадлежности лингвистических переменных (см. рис. 2.21)
Это самая сложная и наиболее требовательная к ресурсам контроллера часть системы нечеткого логического управления. Поэтому при составлении схемотехнической реализации контроллера вопрос о его вычислительной способности должен решаться в первую очередь.
Программу нечеткого логического вывода по ходу ее выполнения можно разделить на три этапа. Этапы выполнения программы нечеткого логического вывода показаны на рис. 2.28.
Рис. 2.28.
Рассмотрим каждый из этих этапов:
Агрегирование подусловий
Агрегирование представляет собой процедуру определения степени истинности по каждому из правил базы знаний системы нечеткого вывода. В случае, если правило состоит из одного условия, то степень его истинности равна значению степени истинности  входящего в такое условие терма.
входящего в такое условие терма.
Если же правило состоит из нескольких условий, то степень истинности такого сложного правила определяется на основе известных значений истинности подусловий.
Так, для операции нечеткой конъюнкции (операции «И») двух термов  и
и  используется известная формула:
используется известная формула:

Например, для правила:
ЕСЛИ (E= XS И znu= Negative ) ТОГДА K= ESmall
при значениях сигналов E=0.1 и znu=-1 его степень истинности:

Активизация подзаключений
Активизация представляет собой процесс нахождения степени истинности каждого из подзаключений правил нечеткой базы знаний. Поскольку в проектируемой системе не вводятся весовые коэффициенты ни для каждого из подзаключений, ни для правил в целом, то степени истинности каждого из подзаключений будут равны степеням истинности соответствующего правила, т.е.  .
.
После определения всех коэффициентов  по каждому из подзаключений, определяются функции принадлежности для каждого из этих подзаключений для выходных лингвистических переменных на основании какого-либо метода нечеткой композиции.
по каждому из подзаключений, определяются функции принадлежности для каждого из этих подзаключений для выходных лингвистических переменных на основании какого-либо метода нечеткой композиции.
Для проектируемой системы, по мнению авторов, наиболее целесообразно применить метод так называемой min-активизации, согласно которому функции принадлежности  для термов выходных лингвистических переменных определяются по формуле:
для термов выходных лингвистических переменных определяются по формуле:

здесь – четкое значение выходного сигнала, а  – его функция принадлежности (см. п. 2.3.4 выше).
– его функция принадлежности (см. п. 2.3.4 выше).
Например, когда одновременно два терма имеют не нулевую функцию принадлежности, функции принадлежности после активизации для термов

и

некой выходной лингвистической переменной будут иметь вид, показанный на рис. 2.29 и рис. 2.30.
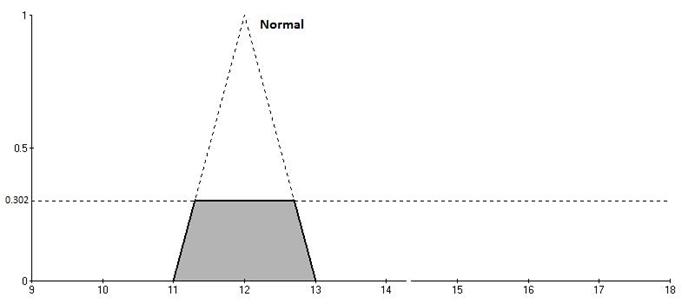
Рис. 2.29.
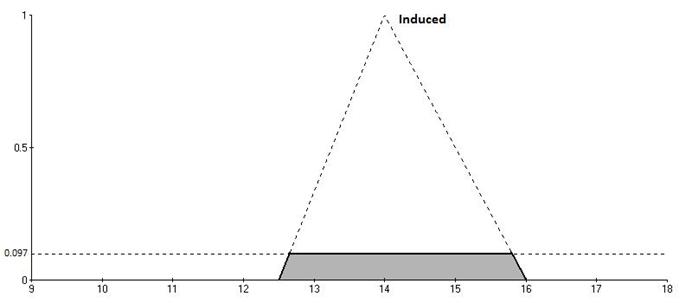
Рис. 2.30.
Аккумуляция заключений
Цель аккумуляции заключается в объединении всех степеней истинности заключений и подзаключений для получения функций принадлежности каждой из выходных лингвистических переменных.
Причина необходимости этого этапа состоит в том, что подзаключения, относящиеся к одной и той же лингвистической переменной могут принадлежать различным правилам нечеткой базы знаний контроллера.
При выполнении этой процедуры последовательно рассматриваются все выходные лингвистические переменные. На основании полученных в результате активизации коэффициентов по каждому из подзаключений для этой переменной (т.е. фактически, на основании известных функций принадлежности ) формируется функция принадлежности всей выходной лингвистической переменной в целом. Формирование этой функции происходит как объединение функций принадлежности для подзаключений, относящихся к данной рассматриваемой лингвистической переменной:


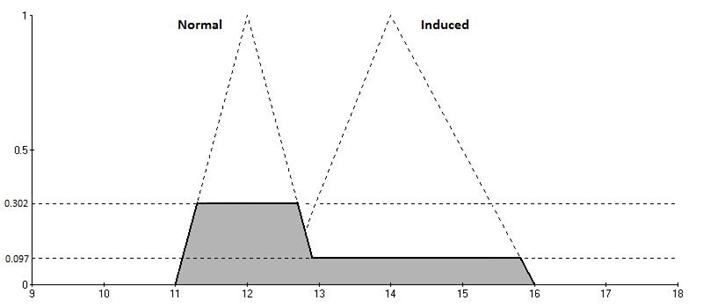
Например, для рассмотренного выше случая функция принадлежности некой лингвистической переменной после аккумуляции будет иметь вид, показанный на рис. 2.31.
Рис. 2.31.
Таким образом, формируется программа нечеткого логического вывода.
В результате последующей процедуры дефазификации на основании полученной функции принадлежности формируется выходной четкий сигнал.
Дефаззификация выходных лингвистических переменных
Как уже упоминалось ранее в п. 3.4.2, цель дефаззификации заключается в том, чтобы, используя результаты аккумуляции всех выходных лингвистических переменных, получить обычное, четкое количественное значение  выходных переменных в виде обычных сигналов, которые могут быть использованы устройствами, внешними по отношению к нечеткой логике.
выходных переменных в виде обычных сигналов, которые могут быть использованы устройствами, внешними по отношению к нечеткой логике.
Для выполнения процедуры дефаззификации применяются различные методы (так называемые методы приведения к четкости). Для целей нашей работы, наиболее целесообразным авторы считают применение так называемого метода центра тяжести (Centre of Gravity, CoG), согласно которому значение выходного сигнала определяется по формуле [1]:
в приведенной формуле оба интеграла вычисляются на интервале, где функция принадлежности  отлична от нуля.
отлична от нуля.
Полученный алгоритм работы системы нечеткого логического вывода достаточно часто применяется в контроллерах на нечеткой логике и носит названия «алгоритм Мамдани» в честь его разработчика, английского математика E. Mamdani.
1 здесь и далее и применяются для обозначения соответственно входных и выходных сигналов и лингвистических переменных, а и – для обозначения термов входных и выходных лингвистических переменных соответственно.