Энергетическая и векторная диаграммы
Синхронного двигателя
При создании тормозного механического момента  на валу синхронная машина, включенная в сеть, переходит в двигательный режим. За счет потребления активной мощности в машине образуется вращающий электромагнитный момент
на валу синхронная машина, включенная в сеть, переходит в двигательный режим. За счет потребления активной мощности в машине образуется вращающий электромагнитный момент  и двигатель сохраняет постоянную частоту вращения ротора
и двигатель сохраняет постоянную частоту вращения ротора  . Активная составляющая тока якоря, угол нагрузки
. Активная составляющая тока якоря, угол нагрузки  и электромагнитный моментменяют знак по сравнению с генераторным режимом.
и электромагнитный моментменяют знак по сравнению с генераторным режимом.
Преобразование энергии в двигателе можно иллюстрировать энергетической диаграммой, рис. 86.
 Часть потребляемой из сети активной электрической мощности
Часть потребляемой из сети активной электрической мощности  расходуется на возбуждение машины статическими системами возбуждения
расходуется на возбуждение машины статическими системами возбуждения  , а также рассеивается в виде электрических потерь
, а также рассеивается в виде электрических потерь  в обмотке якоря и магнитных потерь
в обмотке якоря и магнитных потерь  в его сердечнике.
в его сердечнике.
Электромагнитная мощность  , передается через воздушный зазор вращающимся магнитным полем на ротор в виде полной механической мощности
, передается через воздушный зазор вращающимся магнитным полем на ротор в виде полной механической мощности  . Часть этой мощности компенсирует механические
. Часть этой мощности компенсирует механические  и добавочные
и добавочные  потери мощности.
потери мощности.
Полезная механическая мощность на валу двигателя:

 При электромашинном возбуждении потери на возбуждение
При электромашинном возбуждении потери на возбуждение  показывают в правой части энергетической диаграммы на стороне полезной механической мощности
показывают в правой части энергетической диаграммы на стороне полезной механической мощности  .
.
Векторная диаграмма напряжений явнополюсного синхронного двигателя приведена на рис. 87, в которой ток статора  рассматривается как отдаваемый в сеть. Проекция этого тока на напряжение обмотки статора
рассматривается как отдаваемый в сеть. Проекция этого тока на напряжение обмотки статора  отрицательна, что свидетельствует о том, что активная составляющая тока в действительности потребляется из сети и отдаваемая в сеть активная мощность
отрицательна, что свидетельствует о том, что активная составляющая тока в действительности потребляется из сети и отдаваемая в сеть активная мощность  .
.
Диаграмма соответствует перевозбужденному двигателю, который отдает в сеть индуктивный ток. Из диаграммы следует, что ЭДС  индуктированная потоком возбуждения равна напряжению обмотки статора
индуктированная потоком возбуждения равна напряжению обмотки статора  плюс падения напряжения в этой обмотки:
плюс падения напряжения в этой обмотки:
 .
.
§2 Угловые, U - образные и рабочие характеристики
Синхронного двигателя
Уравнения угловых характеристик синхронного генератора справедливы и для двигательного режима при подстановки отрицательного угла нагрузки  .
.
Электромагнитная мощность и момент изменяют свой знак, так как изменяется направление активной мощности при переходе из генераторного режима в двигательный.
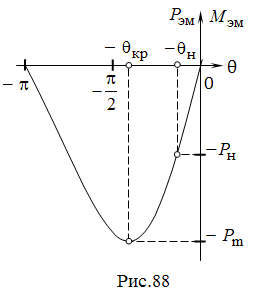
Зависимости  явнополюсного двигателя при постоянных токе возбуждения
явнополюсного двигателя при постоянных токе возбуждения  , напряжении
, напряжении  и частоте
и частоте  сети изображены на рис. 88. Значения номинального
сети изображены на рис. 88. Значения номинального  и максимального
и максимального  углов нагрузки двигателей такие же, как у генераторов. Двигатель статически устойчив при углах нагрузки
углов нагрузки двигателей такие же, как у генераторов. Двигатель статически устойчив при углах нагрузки  .
.
 Синхронные двигатели рассчитывают для работы в режимах перевозбуждения с опережающим номинальным коэффициентом мощности
Синхронные двигатели рассчитывают для работы в режимах перевозбуждения с опережающим номинальным коэффициентом мощности  , в большинстве случаев равным 0,9.
, в большинстве случаев равным 0,9.
Перегрузочная способность двигателей  вследствие постоянства скорости вращения ротора равна кратности максимального момента
вследствие постоянства скорости вращения ротора равна кратности максимального момента 
Электромагнитный момент синхронных двигателей практически линейно зависит от напряжения сети. Поэтому они менее чувствительны (более устойчивы) к снижению напряжения сети, чем асинхронные, электромагнитный момент которых пропорционален квадрату напряжения. Кроме того, статическую устойчивость двигателя при значительном снижении напряжения можно кратковременно повысить увеличением тока возбуждения.
Направление реактивной мощности в синхронной машине при постоянном угле нагрузки  не зависит от его знака, а определяется током возбуждения
не зависит от его знака, а определяется током возбуждения  . Физические процессы, связанные только с изменением
. Физические процессы, связанные только с изменением  одинаковы в двигателях и генераторах. Поэтому U -образные характеристики двигателя практически совпадают с идентичными характеристиками генератора при равной полезной мощности
одинаковы в двигателях и генераторах. Поэтому U -образные характеристики двигателя практически совпадают с идентичными характеристиками генератора при равной полезной мощности  , рис.85.
, рис.85.
В режиме холостого хода U -образные характеристики двигателя и генератора различны. Это обусловлено тем, что в генераторах при полезной электрической мощности  тока в обмотке якоря нет, если установлен нормальный ток возбуждения
тока в обмотке якоря нет, если установлен нормальный ток возбуждения  . Все потери холостого хода компенсируются механической мощностью, подводимой к валу от приводного двигателя или турбины. В двигателе потери холостого хода компенсируются потребляемой из сети электрической мощностью
. Все потери холостого хода компенсируются механической мощностью, подводимой к валу от приводного двигателя или турбины. В двигателе потери холостого хода компенсируются потребляемой из сети электрической мощностью  . Поэтому даже при отсутствии нагрузки на валу (
. Поэтому даже при отсутствии нагрузки на валу ( ) в обмотке якоря есть ток, равный току холостого хода
) в обмотке якоря есть ток, равный току холостого хода  . При нормальном токе возбуждения ток холостого хода чисто активный и не превышает (0,01–0,1)
. При нормальном токе возбуждения ток холостого хода чисто активный и не превышает (0,01–0,1)  .
.
Рабочими характеристиками двигателя называют зависимости потребляемой мощности  , тока якоря
, тока якоря  , полезного момента на валу
, полезного момента на валу  , частоты вращения ротора
, частоты вращения ротора  , коэффициента мощности
, коэффициента мощности  и КПД
и КПД  от полезной мощности на валу
от полезной мощности на валу  при постоянных токе возбуждения
при постоянных токе возбуждения  , напряжении
, напряжении  и частоте
и частоте  сети, рис.89
сети, рис.89
Частота вращения ротора неизменна при нагрузке двигателя до предела статической устойчивости и зависимость  представляет собой прямую, параллельную оси абсцисс.
представляет собой прямую, параллельную оси абсцисс.
Полезный момент на валу  , при
, при  линейно зависит от P 2.
линейно зависит от P 2.
Электромагнитный момент

где  - момент холостого хода.
- момент холостого хода.
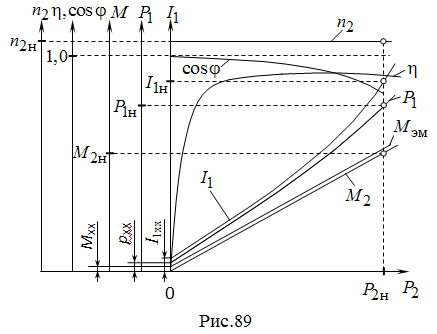
Так как потери холостого хода можно считать постоянными и независящими от нагрузки двигателя, то зависимость  повторяет график полезного момента, смещенный вверх на величину
повторяет график полезного момента, смещенный вверх на величину  .
.
В режиме холостого хода потребляемая двигателем из сети активная мощность  практически равна постоянным потерям, потерям холостого хода, так как электрические потери в обмотке якоря, пропорциональные квадрату тока незначительны, вследствие малого тока холостого хода.
практически равна постоянным потерям, потерям холостого хода, так как электрические потери в обмотке якоря, пропорциональные квадрату тока незначительны, вследствие малого тока холостого хода.
Если ток возбуждения отрегулирован так, что в режиме холостого хода коэффициент мощности  , то с увеличением нагрузки растут угол нагрузки
, то с увеличением нагрузки растут угол нагрузки  и угол φ, а коэффициент мощности уменьшается. Ток якоря отстает от напряжения сети и двигатель работает с отстающим
и угол φ, а коэффициент мощности уменьшается. Ток якоря отстает от напряжения сети и двигатель работает с отстающим  , потребляя из сети реактивную мощность.
, потребляя из сети реактивную мощность.
С увеличением  потребляемая активная мощность
потребляемая активная мощность  сначала растет практически линейно. В дальнейшем зависимость
сначала растет практически линейно. В дальнейшем зависимость  отклоняется от линейной вследствие более быстрого по сравнению с
отклоняется от линейной вследствие более быстрого по сравнению с  роста электрических потерь в обмотке якоря.
роста электрических потерь в обмотке якоря.
Ток якоря  при малых
при малых  и φ практически линейно зависит от
и φ практически линейно зависит от  . Затем он возрастет в большей степени, чем
. Затем он возрастет в большей степени, чем  , вследствие нелинейной зависимости
, вследствие нелинейной зависимости  и увеличения реактивной составляющей тока в случае работы с
и увеличения реактивной составляющей тока в случае работы с  при
при  .
.
Зависимость η= f (P 2) такая же, как и в генераторном режиме. Синхронные двигатели проектируют так, чтобы КПД достигал максимума при значениях коэффициента загрузки  .
.






