Регулирование напряжения обмотки возбуждения машины постоянного тока возможно только вниз от номинального значения. Для регулирования напряжения применим тиристорный преобразователь. Преобразователь выбирается по параметрам обмотки возбуждения. Мощность преобразователя должна быть равна или быть ближайшей большей в ряду мощностей типоразмеров.
Характеристики трансформатора TT-2-380/220:
- Рн = 2 кВт;
-  = 230 В;
= 230 В;
- D Рх.х = 28 Вт – потери холостого хода;
- D Рк.з = 240 Вт – потери короткого замыкания
- % Uк.з. = 5 % – напряжение короткого замыкания.
Характеристики тиристорного преобразователя соответствуют техническим характеристикам электродвигателя.
Схема электрическая принципиальная СНС АЭП
Разработка принципиальной электрической схемы датчиков СУ происходит в 2 этапа.
Составляется схема без корректирующих устройств и блоков самонастройки, т.е. составляющая схема неизменяемой части ЭП, которая включает в себя двигатель, силовые преобразователи, датчики с системами гальванической развязки.
Функциональная схема датчиков тока якоря (ДТЯ) и обмотки возбуждения (ОВ) имеет вид:
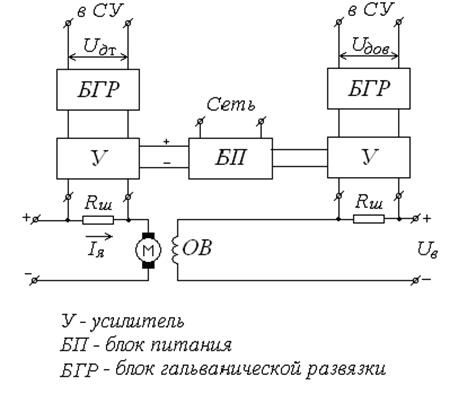
Рисунок № 7.1 – Функциональная схема ДТЯ и ОВ
БГР – предотвращает возможность прохождения силового тока по цепи управления, а также попадания высокого напряжения в цепи управления.
БГР – осуществляется с помощью оптопары.

Рисунок № 7.2 - Схема электрическая принципиальная ДТЯ
Шунт ШС 75 – 100 – 0,5
В качестве оптопары используем ОЭП-16, состоящий из арсенидгаллиевого светодиода и фоторезистора. Основные параметры оптопары:
1. Входное напряжение (при токе 10 мА): 5 В.
2. Коэффициент передачи тока (при токе 10 мА): 0,5 – 5%
Принимаем

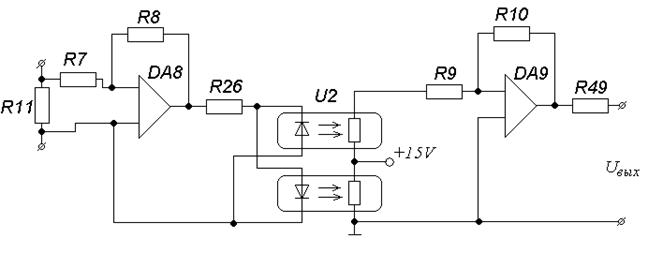
Рисунок № 7.3 - Схема электрическая принципиальная датчика тока ОВ
 А
А
Шунт ШС 75 – 5 – 0,5
Гальваническая развязка ОЭП-16
Принимаем

Датчик напряжения цепи якоря представим в виде делителя напряжения.

Рисунок № 7.4 - Датчик напряжения цепи якоря
Ток датчика напряжения.


Принимаем
тогда 
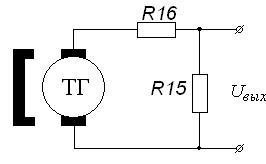
В качестве датчика скорости выберем тахогенератор ТМГ-30
Uн = 220 В
nн = 50-4000 об/мин
Rн = 1760 Ом
UTГ= 110 В.
KТГ=0,5096
Рисунок № 7.5 – Датчик скорости
Принимаем R15 = 200 Ом, тогда
Датчик ЭДС.
Данное устройство реализуется уравнением: Е = Uя – Iя Rя.
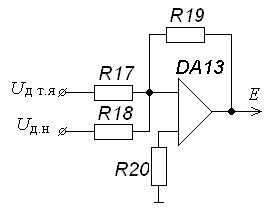
Принимаем
Структурная схема СНС АЭП
Расчет передаточных функций
Элементами схемы являются элементарные динамические звенья и сумматоры. Составляется на основе функциональной схемы и схемы электрической принципиальной. Согласно функциональной схеме определяются блоки, через которые проходит сигнал управления, и по принципиальным схемам этих блоков определяются их передаточные функции.
Передаточные функции двигателя:
– электрическая часть 
– механическая часть 
Расчет статических характеристик
 ,
,
 ,
,
 - сопротивление щетки, Ом;.
- сопротивление щетки, Ом;.
RТП – сопротивление трансформатора, Ом;

RД – динамическое сопротивление тиристора, Ом;
 UТ = 1В – падение напряжения на тиристоре;
UТ = 1В – падение напряжения на тиристоре;
 - электрическая постоянная времени
- электрическая постоянная времени

 - электромеханическая постоянная времени
- электромеханическая постоянная времени

Следовательно, передаточные функции двигателя будут иметь вид
Передаточная функция тиристорного преобразователя
W  (р)=
(р)= 
Передаточная функция датчика тока якоря
W  (р)=
(р)= 
Передаточная функция датчика тока ОВ
 =
= 
Передаточная функция датчика напряжения
К  =
= 
Т  =
= 
W (р)= 
Передаточная функция датчика скорости
WД.С.(р)= 
Передаточная функция согласующего устройства
WСУ(р)=0,8
Передаточная функция датчика ЭДС
W  (р)=
(р)= 
Т =ТЯ=0,0046(с)
К = 
W (р)= 
Передаточная функция эталонной модели двигателя
WЭМ(р)= 
Передаточная функция ОВ
КОВ = 
ТОВ = 0,1 (с)
WОВ= 
Коэффициент передачи между магнитным потоком обмотки возбуждения Ф и током возбуждения IВ
Ф = КОВ·IOB;
l ≈ 0,8 · l30 – длина полюса;
l30 = 645 · 10-3 (м);
l ≈ 0,8 · 645 · 10-3 = 0,516 (м);
S = 0,261 · 0,516 = 0,135 (м2);
Фн = 1,6 · 0,135 = 0,216 (Вб);
КОВ = Фн / IОВ = 0,216/3.136 =0.069;
тогда
Се и См – электромеханическая и электромагнитная постоянная;
 .
.