1) Простейшие П-регуляторы (пропорциональные)
ДУ: 


Кр – коэффициент усиления регулятора;
∆e – изменение ошибки;
∆u – изменение управляющего воздействия;
u0 – начальное значение управляющего воздействия.
Управляющее воздействие пропорционально ошибки регулирования. Чем больше ошибка, тем больше воздействие.
Достоинства: простой (например, если реализуется механизмом, а не программой) и быстродействующий регулятор.
Недостатки: в системах с П-регулятором обычно имеется статическая ошибка.
∆u появится только тогда, когда появится ∆e, то есть если e=0, то регулирования не будет, сигнал вернется к начальному значению u0.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к уставке, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь уставки, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать.
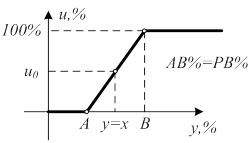
Другое оформление П-регулятора

 - предел пропорциональности
- предел пропорциональности

 - в российских руководствах – диапазон дросселирования.
- в российских руководствах – диапазон дросселирования.
PB и D показывает на сколько % должна измениться ошибка регулирования, чтобы клапан полностью преместиться (на 100%).
Kр и PB – настроечные параметры.
Пример статической характеристики системы?
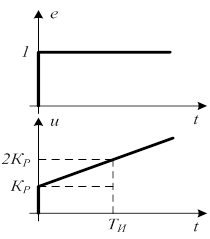
2) И-регулятор (интегральный)


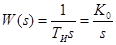 - идеальное интегрирующее звено.
- идеальное интегрирующее звено.
 - время интегрирования, иногда вводится параметр
- время интегрирования, иногда вводится параметр  , как параметр настройки.
, как параметр настройки.
численно равен времени полного открытия клапана, когда ошибка регулирования равна 100%.
Ошибка 
Управляющий сигнал 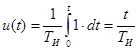 .
.
Клапан перемещается с постоянной скоростью, если  , то
, то  или 100%.
или 100%.
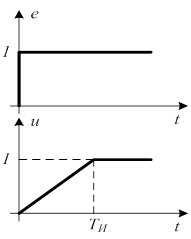
На быстрых системах выбирается TИ маленькое. Системы с И-регулятором не имеют статической ошибки.

Скорость перемещения клапана пропорциональна ошибке, клапан остановится тогда, когда ошибка будет равна нулю.
И-регулятор медленнее П-регулятора.
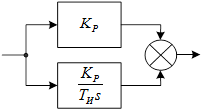
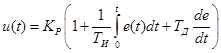
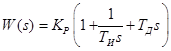
3) ПИ-регулятор (пропорционально-интегральный)
Представляет собой параллельное соединение П- и И-регуляторов.
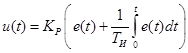
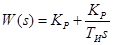 .
.
При расчетах принимается  .
.
Два настроечных параметра Kp и ТИ .
Переходная характеристики
Вначале клапан скачком перемещается, а потом ошибка интегрируется.
Сочетает достоинства П- и И-регуляторов.
4) Д-регулятор



 - время дифференцирования.
- время дифференцирования.
Д-регулятор самостоятельно не используется, так как ошибка может быть как угодно большой, но в статическом режиме регулятор на нее не отреагирует, то есть на выходе будет ноль, так как производная ошибки будет равна нулю.
5) ПД-регулятор (пропорционально-дифференцальный)

ПД-регулятор – параллельное соединение П и Д-регуляторов


Два настроечных параметров Kp и ТД.
АСР с ПД-регулятором имеет статическую ошибку, но она меньше, чем в случае П-регулятора.
Но ПД-регулятор самый бытродействующий (за счет Д-части); происходит существенное улучшение качество регулирования.
Д-часть измеряет скорость изменения ошибки, то есть прогнозирует ход процесса, если скорость положительна, то ошибка возрастает и нужно увеличивать воздействие на клапан и наоборот.
6) ПИД-регулятор
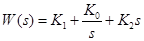
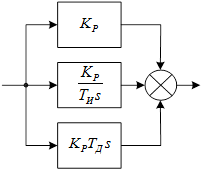
Статическая ошибка равна нулю, так как есть интегральная часть.

Анализ качества АСР
Устойчивость – это необходимое, но недостаточное условие работы АСР. Помимо устойчивости АСР должна обладать некоторыми показателями качества. Под понятием качества понимается совокупность требований, предъявляемых к переходным и установившимся процессам.
Для оценки качества существует специальные показатели или критерии качества – это некоторые числовые характеристики, с помощью которых осуществляется переходный и установившийся процесс.
Показатели качества:
прямые
косвенные
Прямые показатели качества позволяют оценивать качество непосредственно по кривой переходного процесса. Их недостатком является то, что для выбора оптимальных параметров приходится строить серию переходных кривых.
Косвенные критерии не требуют построения переходных кривых, кроме того, как правило, позволяют оценивать влияние параметров системы на качество регулирования.
На практике комбинируют: по косвенным - определяют оптимальные параметры регулятора, на заключительном этапе строят переходные кривые и оценивают прямые показатели качества.
Прямые критерии качества.
При оценке качества регулирования возникают определенные проблемы, так как на АСР действуют различные возмущения случайные и детерминированные сигналы различной формы.
Форма возмущений заранее не известна. При одних система покажет хорошее качество регулирования, при других – существенно хуже.
Обычно параметры настройки рассчитывают для наиболее тяжелого возмущения, как правило, наиболее тяжелым возмущением считают скачкообразное воздействие.
Так как реакцией на единичное скачкообразное воздействие есть переходная кривая, то прямые критерии качества определяют по переходной кривой.
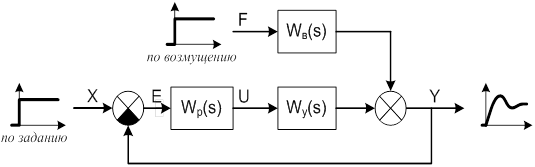
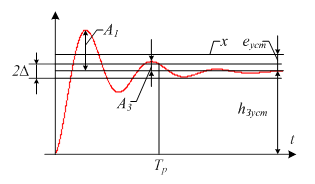
Переходная характеристика по заданию
Переходная характеристика по возмущению
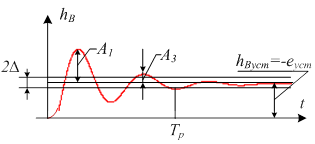
- Статическая (установившаяся) ошибка

- Перерегулирование
Допустимое перерегулирование – 15-20%, в некоторых случаях перерегулирование не допускается. Определяется только для процессов по задающему воздействию.
- Степень затухания – характеризует интенсивность затухания переходного процесса
 .
.
Степень затухания может изменяться в пределах:  .
.
Случай  соответствует
соответствует  – незатухающим колебаниям, недопустимо.
– незатухающим колебаниям, недопустимо.
Случай  соответствует
соответствует  – процесс затухает сразу, допустимый вариант.
– процесс затухает сразу, допустимый вариант.
На практике 
4. Время регулирования  – время, по истечении которого отклонение регулируемой величины от своего установившегося значения не превышает некоторой наперед заданной величины
– время, по истечении которого отклонение регулируемой величины от своего установившегося значения не превышает некоторой наперед заданной величины  .
.
Для процессов по заданию  , для процессов по возмущению
, для процессов по возмущению  .
.
Другие критерии: время достижения первого максимума, число полуколебаний и др.
Косвенные критерии качества
3 группы
Интегральные – связаны с площадью под кривой переходного процесса.
Корневые – связаны с распределением корней характеристического полинома замкнутой системы.
Частотные – связаны с частотными характеристиками в системе.






