Введение
рычажный звено кинематический
Задачей данного курсового проекта является проектирование рычажного механизма.
Целью кинематического анализа механизма является установление положений всех звеньев механизма и траекторий их точек, определение угловых скоростей и ускорений звеньев, а также линейных скоростей и ускорений некоторых точек этих звеньев. Кинематическому исследованию механизма посвящен первый лист проекта. Задачи о положениях звеньев в траекториях точек решены на первом листе графически путем построения кинематической схемы механизма в двенадцати положениях (при двенадцати положениях кривошипа).
Основной задачей силового расчета механизма, выполненного на втором листе является определение сил, действующих на звенья механизма, давления в кинематических парах и уравновешивающей силы (момента) на звене, принятом за ведущее. Решение этих задач позволяет располагать данными для прочностных расчетов звеньев, элементов кинематических пар и определения мощности двигателя привода.
Основной задачей синтеза кулачкового механизма является построение профиля кулачка по заданным законам движения. Все необходимый диаграммы и профиль кулачка приведены на третьем листе курсового проекта.
Задание на проектирование
Таблица 1. Исходные данные для проекта
| Наименование параметра
| Обозначение и величина
|
| Длина кривошипа О1А, м
| LO1A = 0,1
|
| Длина шатуна АВ, м
| LAB = 0,4
|
| Длина коромысла О2В, м
| LO2B = 0,32
|
| Длина коромысла О2С, м
| LO2C = 0,45
|
| Длина шатуна CD, м
| LCD =0,55
|
| Масса кривошипа О1А, кг
| m1 =23
|
| Масса шатуна АВ, кг
| m2 = 8
|
| Масса коромысла О2С, кг
| m3 = 9
|
| Масса шатуна CD, кг
| m4 =10
|
| Масса ползуна D, кг
| m5 = 40
|
| Моменты инерции звеньев IS1 относительно их центров тяжести, кг×м2 (определяются по формуле ISi = (mi×Li2)/10).
| IS1 =0,023 IS2 =0,128 IS3 =0,9216 IS4 =0,2025
|
| Частота вращения О1А, об/мин
| nO1A =200
|
| Числа зубьев зубчатых колёс
| z1 =12; z2 = 20
|
| Модуль зубчатых колёс, мм
| m =10
|
| Рабочий угол поворота кулачка
| jРАБ =260°
|
| Ход толкателя
| Smax =70 мм
|
| Минимальный угол передачи
| gmin =60°
|
| Центры тяжести звеньев, обозначенные буквой S, расположены на середине звеньев
|
| Технологическое усилие, действующее на ползун D при его движении вправо F =4100 Н. При движении ползуна D влево усилие F = 0.
|
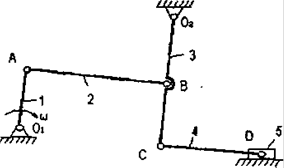
Рисунок 1 - Кинематическая схема рычажного механизма
Структурный анализ рычажного механизма
Механизм плоский рычажный.
Для этого механизма: т = 5; р5 = 7; р4 = 0.
Степень подвижности механизма определяется по формуле П.Л. Чебышева:
W = 3n - 2р5 - р4 = 3·5 - 2·7 - 0 = 1,
где n - число подвижных звеньев;
р5 - число пар пятого класса;
р4 - число пар четвёртого класса.
Механизм имеет одну степень подвижности. Для определённости движения всех звеньев механизма необходимо иметь одно входное звено.
Разложим механизм на группы Асура.
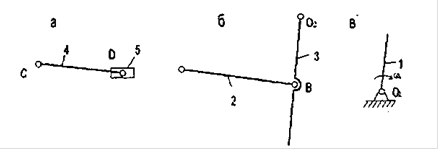
Рисунок 2 - Строение механизма:
а - группа Ассура 2-го класса, 2-го вида, 2-го порядка;
б - группа Ассура 2-го класса, 1-го вида, 2-го порядка;
в-механизм 1-го класса или группа начальных звеньев
Кинематический анализ рычажного механизма
Кинетостатический анализ рычажного механизма
Определение сил
Силы тяжести звеньев определяем по формуле
G = m×g, Н
где g = 9,8 м / с-2 - ускорение силы тяжести.
G1 = 23·9,8 =225 Н
G2 = 8·9,8 = 78,4 Н
G3 = 9·9,8 = 88,2 Н
G4 = 10·9,8 = 98 Н,
G5 = 40·9,8 = 392 Н
Сила сопротивления перемещению ползуна, направленная в противоположную сторону скорости VD
F = 4100 Н
Силы инерции
ФИ1 = m1×aS1 = 23·22 =517,5 Н
ФИ2 = m2×aS21 =8·32,5 =260 Н
ФИ3 = m3×aS3 =9·26 =234 Н
ФИ4 = m4×aS4 =10·52,5 =525 Н
ФИ5 = m5×aS5 =40·53 =2120 Н
Моменты сил инерции звеньев.
МИ1 = JS1× e1 =0,023·0 =0 Н·м,
МИ2 = JS2× e2 =0,128·100 =12,8 Н·м
МИ3 = JS3× e3 =0,9216·78,125 =72 Н·м,
МИ4 = JS4× e4 =0,2025·3,636 =0,73629 Н·м
Заключение
. Выполнен структурный анализ механизма. Выявлены основные особенности и разновидности групп Асура состав и последовательность присоединений структурных групп. Рассмотренный механизм, являющийся механизмом второго класса, структурно работоспособен.
. Найдены положения звеньев механизма и траектории отдельных точек. Решены задачи определения линейных скоростей и ускорений точек, а так же угловых скоростей и ускорений звеньев.
. Получены реакции в кинематических парах. Найдена величина уравновешивающего момента. Максимальная сила инерции в рассмотренном положении механизма меньше технологического усилия. Максимальная сила веса звена меньше технологического усилия. Следовательно, основная часть усилий на звенья и реакций в кинематических парах обусловлена технологическим усилием.
. Спроектированы кулачковые механизмы, обеспечивающие заданные законы движения толкателя при выполнении обязательных и желательных условиях синтеза.
Список литературы
1. Курсовое проектирование по теории механизмов и машин / под ред. А.С. Кореняко. Киев.: Вища школа, 1970. 332 с.
. Теория механизмов и механика машин / под ред. К.В. Фролова. М.: Высш. шк., 1998. 496 с.
. Попов С.А. Курсовое проектирование по теории механизмов и машин. С.А. Попов, Т.А. Тимофеев. М.: Высш. шк., 1998. 351 с.
Введение
рычажный звено кинематический
Задачей данного курсового проекта является проектирование рычажного механизма.
Целью кинематического анализа механизма является установление положений всех звеньев механизма и траекторий их точек, определение угловых скоростей и ускорений звеньев, а также линейных скоростей и ускорений некоторых точек этих звеньев. Кинематическому исследованию механизма посвящен первый лист проекта. Задачи о положениях звеньев в траекториях точек решены на первом листе графически путем построения кинематической схемы механизма в двенадцати положениях (при двенадцати положениях кривошипа).
Основной задачей силового расчета механизма, выполненного на втором листе является определение сил, действующих на звенья механизма, давления в кинематических парах и уравновешивающей силы (момента) на звене, принятом за ведущее. Решение этих задач позволяет располагать данными для прочностных расчетов звеньев, элементов кинематических пар и определения мощности двигателя привода.
Основной задачей синтеза кулачкового механизма является построение профиля кулачка по заданным законам движения. Все необходимый диаграммы и профиль кулачка приведены на третьем листе курсового проекта.
Задание на проектирование
Таблица 1. Исходные данные для проекта
| Наименование параметра
| Обозначение и величина
|
| Длина кривошипа О1А, м
| LO1A = 0,1
|
| Длина шатуна АВ, м
| LAB = 0,4
|
| Длина коромысла О2В, м
| LO2B = 0,32
|
| Длина коромысла О2С, м
| LO2C = 0,45
|
| Длина шатуна CD, м
| LCD =0,55
|
| Масса кривошипа О1А, кг
| m1 =23
|
| Масса шатуна АВ, кг
| m2 = 8
|
| Масса коромысла О2С, кг
| m3 = 9
|
| Масса шатуна CD, кг
| m4 =10
|
| Масса ползуна D, кг
| m5 = 40
|
| Моменты инерции звеньев IS1 относительно их центров тяжести, кг×м2 (определяются по формуле ISi = (mi×Li2)/10).
| IS1 =0,023 IS2 =0,128 IS3 =0,9216 IS4 =0,2025
|
| Частота вращения О1А, об/мин
| nO1A =200
|
| Числа зубьев зубчатых колёс
| z1 =12; z2 = 20
|
| Модуль зубчатых колёс, мм
| m =10
|
| Рабочий угол поворота кулачка
| jРАБ =260°
|
| Ход толкателя
| Smax =70 мм
|
| Минимальный угол передачи
| gmin =60°
|
| Центры тяжести звеньев, обозначенные буквой S, расположены на середине звеньев
|
| Технологическое усилие, действующее на ползун D при его движении вправо F =4100 Н. При движении ползуна D влево усилие F = 0.
|
Рисунок 1 - Кинематическая схема рычажного механизма
Структурный анализ рычажного механизма
Механизм плоский рычажный.
Для этого механизма: т = 5; р5 = 7; р4 = 0.
Степень подвижности механизма определяется по формуле П.Л. Чебышева:
W = 3n - 2р5 - р4 = 3·5 - 2·7 - 0 = 1,
где n - число подвижных звеньев;
р5 - число пар пятого класса;
р4 - число пар четвёртого класса.
Механизм имеет одну степень подвижности. Для определённости движения всех звеньев механизма необходимо иметь одно входное звено.
Разложим механизм на группы Асура.
Рисунок 2 - Строение механизма:
а - группа Ассура 2-го класса, 2-го вида, 2-го порядка;
б - группа Ассура 2-го класса, 1-го вида, 2-го порядка;
в-механизм 1-го класса или группа начальных звеньев






