Введение
В проблеме осуществления научно-технического прогресса значительная роль отводится подъемно-транспортному машиностроению, перед которым поставлена задача широкого внедрения во всех областях народного хозяйства комплексной механизации и автоматизации производственных процессов, ликвидации ручных погрузочно-разгрузочных работ и исключения тяжелого ручного труда при выполнении основных и вспомогательных технологических операций.
Необходимым является увеличение производства прогрессивных средств механизации подъемно-транспортных, погрузочно-разгрузочных и складских работ. Современные поточные технологические и автоматизированные линии, межцеховой и внутрицеховой транспорт требуют применения разнообразных типов подъемно-транспортных машин и механизмов, обеспечивающих непрерывность и ритмичность производственных процессов. Поэтому подъемно-транспортное оборудование в настоящее время превратилось в один из основных решающих факторов, определяющих эффективность производства. Насыщенность производства средствами механизации трудоемких и тяжелых работ, уровень механизации технологического процесса определяют собой степень совершенства технологического процесса.
Правильный выбор подъемно-транспортного оборудования влияет на нормальную работу и высокую продуктивность производства. Нельзя обеспечить его устойчивый ритм на современной ступени интенсификации без согласованной и безотказной работы современных средств механизации внутрицехового и межцехового транспортирования сырья, полуфабрикатов и готовой продукции на всех стадиях обработки и складирования.
Современные высокопроизводительные грузоподъемные машины, работающие с большими скоростями и обладающие высокой грузоподъемностью, являются результатом постепенного развития этих машин в течение долгого времени. Они непрерывно совершенствуются, поэтому возникают новые задачи по расчету, проектированию, исследованию и выбору оптимальных параметров машин, обеспечивающих высокие технико-экономические показатели и качество машин.
МОСТОВОЙ КРАН ОБЩЕГО НАЗНАЧЕНИЯ
Общие сведения о мостовых кранах
Мостовым краном называется грузоподъемная машина, передвигающаяся по рельсам на некотором расстоянии от земли (пола) и предназначенная для внутрицехового и внутри - складского перемещения груза. Мостовые краны являются одним из наиболее распространенных средств механизации различных производств, погрузочно-разгрузочных и складских работ. Перемещаясь по путям, расположенным над землей, они не занимают полезной площади цеха или склада, обеспечивая в то же время обслуживание практически любой их точки. К мостовым кранам общего назначения относят краны, предназначенные для работы с разнообразными грузами и имеющие в качестве грузозахватных органов грузовые крюки. Эти краны, в отличие от кранов, снабженных специальными грузозахватными устройствами (грейферами, магнитами и т.д.), называют крюковыми кранами, которые согласно статистическим исследованиям составляют около 2/3 всех эксплуатируемых мостовых кранов. Кран общего назначения изображен на рис. 1.1.

Рисунок 1.1. Мостовой кран общего назначения
1 - подкрановый путь; 2 - колесо; 3 - концевая балка; 4 - гибкий кабель; 5 - вспомогательный механизм подъема; 6 - главный механизм подъема; 7 – тележка; 8 – троллеи; 9 - площадка для обслуживания троллеев; 10 - мост, 11 - механизм передвижения тележки; 12 - механизм передвижения крана; 13 - кабина.
Тележки мостовых кранов
Тележки мостовых кранов предназначены для подъема и перемещения груза. При помощи тележек груз передвигают вдоль пролета. Краны общего назначения изготавливают с четырьмя опорами.
Рама тележки имеет очень жесткую конструкцию. На ней располагается:
- механизм подъема;
- механизм передвижения;
- предмет для распределения тока;
- механизм безопасности.
Механизм безопасности обеспечивает нормальное передвижение и подъем грузов. К устройствам для безопасности относят предметы, которые ограничивают высоту подъема груза и грузоподъемность.
Также к безопасности относится такой механизм подъема, который автоматически отключается при подъеме груза на максимальную высоту, а так же при подъеме груза вес, которого превышает допустимый вес на 10%. На тележке фиксируют механизмы, измеряющие массу груза, а также линейку. На мосту крана устанавливают выключатели, которые ограничивают передвижение тележки в крайние направления.
Когда тележка подходит к крайнему положению, то линейка взаимодействует с выключателями и автоматически блокируется дальнейшее движение тележки.

Рисунок 1.2. Устройство тележки мостового крана
Тележки сконструированы так, что они имеют такое строение, которое позволяет им быть однобалочными и двухбалочными.
Механизмы на раме тележки расположены так, чтобы нагрузка на ходовые колеса была одинаковой. Для этого применяют при подъеме механизмы, которые имеют барабан с двумя нарезками разных направлений. Если в тележке используются механизмы главные и второстепенные, то конструкция главного подъема располагается так, чтобы при подъеме на нее была нагрузка больше, чем на второстепенный механизм. Ходовая часть тележки устроена так, чтобы одинаково распределить нагрузку на главные балки моста, а так же силы тяжести любого из поднимаемых грузов.
Вес тележки мостового крана составляет от 30 до 40% грузоподъемности крана. Тележка может быть оборудована дополнительными механизмами, к которым относятся:
- ограничители высоты подъема: отключают механизм при достижении максимально допустимой высоты подъема груза;
- грузоподъемности: отключают тележку при попытке подъема груза, масса которого превышает номинальную на 10%;
- линейка для ограничения передвижения тележки по пролету крана. Она работает совместно с концевиками, установленными на кране;
- буфера, ограничивающие передвижение тележки в случае выхода из строя концевых выключателей.
Передвигается тележка при помощи электропривода. На легких мостовых кранах иногда используются конструкции, управляемые вручную (лебедочные). Выбор типа телеки зависит от режима работы крана и его грузоподъемности.
Механизм подъема
Схема механизма подъема груза мостового электрического крана зависит от типа грузозахватного устройства; массы поднимаемого груза, высоты подъема, необходимых устойчивых скоростей подъема или опускания груза и т.п. Если в качестве грузозахватного устройства применяют грузовые крюки, петли, одноканатный грейфер и другие аналогичные устройства, то для подъема груза используют только один механизм (рис. 1.3). Этот механизм состоит из грузового каната 5, сбегающего с барабана 8 и огибающего блоки крюковой подвески 4, обводные блоки 6 и уравнительный блок 7, редуктора 9, снабженного тормозом 1, промежуточного вала 2 и приводного электродвигателя 3. Для соединения грузового крюка с канатом в механизмах подъема мостовых кранов используют нормальные и укороченные грузовые подвески. В нормальной подвеске крюк через гайку на хвостовике опирается на упорный подшипник, который посредством сферической шайбы передает усилие с крюка на траверсу. Траверса шарнирно закреплена в серьгах и защитных щитках, в верхней части которых неподвижно установлена ось с блоками для канатного полиспаста. В укороченной грузовой подвеске грузовой крюк и блоки канатного полиспаста размещены на общей траверсе. Укороченные подвески для кранов малой и средней грузоподъемности снабжаются удлиненными однорогими крюками, а для кранов большой грузоподъемности — пластинчатыми двурогими крюками. Для исключения возможности выпадения канатного стропа из зева крюка при подъеме и перемещении грузов крюк снабжают специальной защелкой. При зацеплении или снятии стропа защелку отводят в сторону тела крюка.
 Рисунок 1.3. Схема механизма подъема груза
Рисунок 1.3. Схема механизма подъема груза
|
|
Свободные концы грузового каната крепят на грузовом барабане. При работе механизма подъема груза канат наматывается на барабан и огибает обводные блоки. При этом в канатах возникают напряжения растяжения от массы поднимаемого груза и дополнительные напряжения изгиба на блоках и барабане. Поэтому канаты должны обладать высокой прочностью и достаточной гибкостью.
Выбор кинематической схемы
Для данного механизма подъема с грузоподъемностью Q =20 т по таблице 2.1 определим кратность полиспаста.
Таблица 2.1 Рекомендуемые значения кратности полиспаста
| Характер навивки каната на барабан
| Тип полиспаста
|  при грузоподъемности, т при грузоподъемности, т
|
| до 1
| 2-6
| 10-15
| 20-30
| 40-50
|
| Непосредственно
| Сдвоенный
| 2
| 2
| 2;3
| 3;4
| 4;5
|
| Одинарный
| 1
| 2
| -
| -
| -
|
| Через направляющие блоки (стреловые, некоторые козловые краны)
| Одинарный
| 1;2
| 2;3
| 3;4
| 5;6
| -
|
| Сдвоенный
| -
| 2
| 2;3
| -
| -
|
Выбираем кратность полиспаста ип = 4. Схема запасовки для данной кратности полиспаста представлена на рисунке 2.1

Рисунок 2.1 - Кинематическая схема механизма подъема груза:
1 – электродвигатель; 2 – соединительная муфта; 3 – промежуточный вал; 4 – тормоз; 5 – редуктор; 6 – барабан; 7 – верхний блок; 8 - уравнительный балансир; 9 - канат; 10 - крюковая подвеска.
Выбор каната
Вес номинального груза и крюковой подвески равен

где  – масса груза,
– масса груза,  – масса подвески.
– масса подвески.
Для полиспаста с un=4 имеются значения к.п.д. полиспаста hn =0,96; число ветвей навиваемых на барабан Zк.б. =2. Направляющие блоки в схеме отсутствуют, поэтому hн.б .=1.
Максимальное статическое усилие Smax в канате:

где G – вес номинального груза и крюковой подвески, Н; Zк.б. – число ветвей каната, навиваемых на барабан; un – кратность полиспаста; h n – КПД полиспаста; hн.б . – КПД направляющих блоков.
Выбираем тип каната ЛК-Р конструкции 6×19(1+6+6/6)+1о.с. ГОСТ 2688-80 (рисунок 2.3)

Рисунок 2.3 – Канат двойной свивки типа ЛК - Р6х19(1+6+6/6)+1 o.c ГОСТ 2688-80
Kзап= 6,0 для весьма тяжелого режима.
Проверяем условие – произведение максимального статического усилия в канате на коэффициент запаса прочности не должно превышать разрывного усилия каната в целом, указанного в таблице ГОСТа:


Выбираем канат с параметрами:
dк=16,5 мм, с разрывным усилием, Sразр = 166 кН; маркировочная группа 1960 МПа.
Проверяем условие

где e – коэффициент, регламентируемый нормами Ростехнадзора и зависящий от типа машины и режима работы; e=35 для весьма тяжелого режима.



где  – глубина канавки блока.
– глубина канавки блока.
Выбор двигателя
Предварительное значение КПД механизма примем  .
.
Максимальна статическая мощность, которую должен иметь механизм в период установившегося движения при подъеме номинального груза:

Для кранов общего назначения мощность двигателя составит:

Примем электродвигатель МТН 412-6 (рисунок 2.5) со следующими характеристиками:
- мощность Nдв, кВт 30;
- частота вращения вала nдв, об/мин 960;
- масса m, кг 345;
- коэффициент полезного действия 0,87;
- момент инерции ротора, кг*м2 0,63
- максимальный момент, МН 2,8

Рисунок 2.5. - Общий вид электродвигателя
Таблица 2.2 Габаритные, присоединительные размеры электродвигателя МТН 412-6
| Размеры, мм
|
| b1
| b10
| b11
| d1 , d 2
| d 5
| d 10
| d 20
| d 22
| d 24
| d 25
| h
| h1
| h10
| h31
| l1,l2
| l11
| l30
| l31
| l33
|
| 16
| 330
| 440
| 65
| M42x3
| 28
| 350
| 18
| 400
| 300
| 225
| 10
| 25
| 525
| 140
| 510
| 781
| 165
| 926
|
Выбор передачи
Частота вращения барабана:

Требуемое передаточное число лебедки:

Принимаем редуктор 1Ц2У-355 (цилиндрический двухступенчатый редуктор) с параметрами: номинальный крутящий момент на выходном валу Т = 14000 Нм, КПД 0,98, масса 700 кг, передаточное число u =40, суммарное межосевое расстояние a = 355 мм, диаметр конца входного вала d = 55мм диаметр конца выходного вала d = 125мм (рисунок 2.6, 2.7).
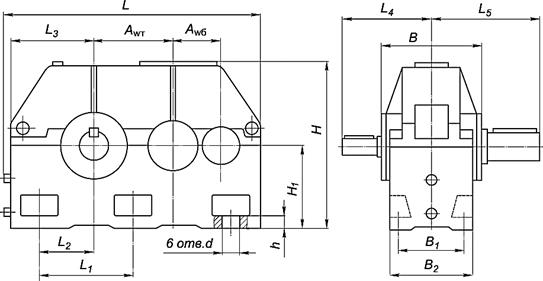
Рисунок 2.6 – Общий вид редуктора 1Ц2У-355
Таблица 2.3 Габаритные, присоединительные размеры редуктора 1Ц2У-355
| Редуктор
| Aw т
| Aw б
| B
| B 1
| B 2
| H
| H 1
| h
| L
| L 1
| L 2
| L 3
| L 4
| L 5
| d
|
| 1Ц2У-355
| 355
| 225
| 435
| 280
| 360
| 740
| 375
| 35
| 1160
| 425
| 250
| 400
| 320
| 440
| 28
|
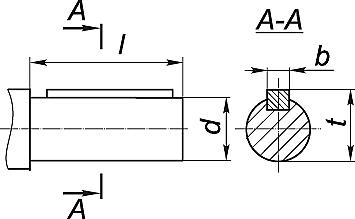
Рисунок 2.7 – Присоединительные размеры редуктора 1Ц2У-315
Таблица 2.4 Присоединительные размеры цилиндрических валов редуктора 1Ц2У-315
| Редуктор
| быстроходный вал
| тихоходный вал
|
| d
| l
| b
| t
| d
| l
| b
| t
|
| 1Ц2У-355
| 55m6
| 110
| 16
| 59
| 125m6
| 210
| 32
| 132
|
По условию передаточное число редуктора не должно отличаться от требуемого передаточного числа более чем на 15 %.

 - условие выполняется
- условие выполняется
Принимаем класс нагружения В4. Ему при заданной группе режима работы 6М соответствует класс использования А4. Коэффициент нагружения k=0,9.
Значение коэффициента переменности нагрузки:

Машинное время работы механизма tмаш = 12500 ч
Частота вращения тихоходного вала: 
Число циклов нагружения на тихоходном валу редуктора:

Передаточное число тихоходной ступени редуктора предполагаем близким к значению  .
.
Суммарное число циклов контактных напряжений зуба шестерни тихоходной ступени редуктора:

Принимаем базовое число циклов для типажных редукторов:

Определяем коэффициент  :
:
Коэффициент долговечности:

Расчетный крутящий момент на тихоходном валу редуктора при подъеме номинального груза:

где:  КПД опор барабана;
КПД опор барабана;  максимальное статическое усилие, Н;
максимальное статическое усилие, Н;  радиус барабана, м.
радиус барабана, м.
Эквивалентный момент равен:

По условию расчетный эквивалентный момент на тихоходном валу, не должен превышать номинальный крутящий момент на тихоходном валу по паспорту редуктора:

 – условие выполняется.
– условие выполняется.
Угловая скорость двигателя

Передаточное число механизма:

где  – передаточное число редуктора;
– передаточное число редуктора;  – кратность полиспаста
– кратность полиспаста
Фактическая скорость движения груза при подъеме:

Выбор соединительной муфты
Для соединения валов двигателя и редуктора выбираем тип муфты - зубчатую с промежуточным валом. Такая муфта хорошо компенсирует возможные неточности монтажа и может передавать большие крутящие моменты. Диаметры концов валов d дв =65 мм, dр. быстр=55 мм. Выбираем типоразмер муфты: муфта 2-4000-65-2-600-2У2 ГОСТ 5006.. Данная муфта имеет параметры: Тм н =4000 Нм, частота вращения не более 62 с-1, J =0,15 Нм2, масса не более 15,2 кг
Выбор тормоза
КПД двухступенчатого цилиндрического редуктора: 
КПД всего механизма:

Статический крутящий момент при торможении, создаваемый весом номинального груза на валу, на котором устанавливается тормоз:

Расчетный тормозной момент:

где:  коэффициент запаса торможения, назначаемый Правилами ГГТН в зависимости от режима работы
коэффициент запаса торможения, назначаемый Правилами ГГТН в зависимости от режима работы  ;
;
По данному значению тормозного момента подбираем тип тормоза ТКГ – 300 с Тт р= 800 Н*м

Рисунок 2.8 Тормоз типа ТКГ
Таблица 2.5 Габаритные, установочные размеры тормоза ТКГ – 300
|
| H
| F
| D
| K1
| K2
| h
| b
| c
| d
|
| ТКГ-300
| 554
| 230
| 300
| 250
| 250
| 240
| 80
| 150
| 22
|
Выбор колес
Используя значение  , выбираем колесо диаметром:
, выбираем колесо диаметром: 
 Типоразмер рельса с выпуклой головкой – Р24 ГОСТ 6368-82.
Типоразмер рельса с выпуклой головкой – Р24 ГОСТ 6368-82.
По диаметру колеса выбираем стандартные колесные установки; приводную колесную установку К2Р (рисунок 3.2): D = 320 мм; dц =70 мм; B = 80 мм; zреб =2. Форма поверхности катания – цилиндрическая. Тип подшипника – роликовый радиальный сферический двухрядный с симметричными роликами.

Рисунок 3.2 – Колеса крановые типа К2Р (ГОСТ 3569)
Таблица 3.1 Размеры крановых колес на угловых буксах
| Размеры, мм
|
| D
| D1
| B
| B1
| d
| d1
| d2
| L
| S
|
| 320
| 360
| 80
| 120
| 70
| 120
| 275
| 120
| 20
|
Выбор подтележечного рельса
Выбираем рельс RH-70 ГОСТ 4121-76 с выпуклой головкой. Значение b=70 мм.
Проверим соотношение ширины дорожки катания колеса В и головки рельса b:
В- b=80-70=10 мм, что не меньше нормы, определенной для тележечного двухребордного колеса.
Выбор двигателя
Необходимую мощность определяют по формуле:

где:  предварительное значение КПД механизма;
предварительное значение КПД механизма;  кратность средне пускового момента двигателя по отношению к номинальному (принимаем
кратность средне пускового момента двигателя по отношению к номинальному (принимаем  );
);
 скорость передвижения тележки, м/с.
скорость передвижения тележки, м/с.
Выбираем двигатель МТF 112– 6 (рисунок.3.3).

Рисунок 3.3. Электродвигатель МТF 112– 6
Таблица 3.2 Технические характеристики кранового электродвигателя МТF 112– 6
| Тип двигателя
| Напряжение статора, В
| Ток статора, А
| Номинальная
мощность, кВт
| Номинальная частота вращения вала, об/мин
| КПД, %
| Коэффициент мощности Cosφ
| Отношение пускового момента к номинальному
|
| MTF 112-6
| 210
| 14,7
| 5,0
| 925
| 75
| 0,65
| 2,6
|
Таблица 3.3 Габаритные размеры кранового электродвигателя МТF 112–6
| Тип двигателя
| Исполнение по способу монтажа
| l10, мм
| l11, мм
| l30, мм
| l31, мм
| l33, мм
| Масса, кг
|
| MTF 112-6
| IM1001
| 235
| 285
| 623,5
| 135
| -
| 99,5
|
| IM1001-1
| 235
| 285
| 623,5
| 135
| -
| 99,5
|
| IM1002
| 235
| 285
| 623,5
| 135
| 713
| 100
|
| IM2001
| 235
| 285
| 623,5
| 135
| -
| 100,5
|
| IM2002
| 235
| 285
| 623,5
| 135
| 713
| 101
|
Электродвигатель имеет следующие параметры:

Выбор передачи
Частота вращения колеса равна:

где:  диаметр колеса, м;
диаметр колеса, м;  скорость передвижения тележки, м/с.
скорость передвижения тележки, м/с.
Требуемое передаточное число механизма равно:

Выбираем редуктор ВКУ-500М с параметрами: передаточное число u =14, Номинальный крутящий момент на тихоходном валу, 3320 Н.м (ПВ=40%) суммарное межосевое расстояние a = 500 мм, диаметр конца входного вала d =40 мм, d2 =65мм (рисунок 3.4).

Рисунок 3.4 Редуктор ВКУ - 500
Таблица 3.4 Основные размеры редуктора ВКУ-500
| Редуктор
| Awт
| Awп
| Awб
| A
| A1
| B
| B1
| H
| H1
| H2
| L
| L1
| L2
| L3
| L4
| L5
| d
| h
|
| Редуктор крановый ВКУ-500М
| 200
| 160
| 140
| 240
| 70
| 360
| 320
| 475
| 160
| 40
| 840
| 505
| 85
| 200
| 305
| 310
| 17
| 30
|

Рисунок 3.5 Присоединительные размеры редуктора ВКУ - 500
Таблица 3.5 Присоединительные размеры редуктора ВКУ-500
| Редуктор
| быстроходный вал (конический)
| тихоходный вал (цилиндрический)
|
| d
| d1
| l
| l1
| b
| t
| d2
| l2
| b1
| t1
|
| Редуктор крановый ВКУ-500М
| 40
| М24х2,0
| 110
| 82
| 10
| 20,95
| 65
| 105
| 18
| 69
|
Определяем эквивалентный момент на тихоходном валу редуктора Тр.э. Аналогично механизму главного подъема примем для группы режима6 принимаем класс нагружения В4 и класс использования А4. При этом  .
.
Коэффициент переменной нагрузки находим по формуле:

Частота вращения тихоходного вала редуктора равна частоте вращения колеса

Число циклов нагружения на тихоходном валу редуктора находим по формуле:

Передаточное число тихоходной ступени 
Суммарное число циклов контактных напряжений зуба шестерни тихоходной ступени:

Базовое число циклов контактных напряжений:
Коэффициент срока службы находим по формуле:

Коэффициент долговечности равен:

Угловая скорость вала двигателя:

Номинальный крутящий момент на валу электродвигателя равен:

где:  мощность двигателя, Вт.
мощность двигателя, Вт.
Максимальный момент двигателя:

где:  кратность максимального момента
кратность максимального момента  .
.
Расчетный крутящий момент на тихоходном валу редуктора:

Расчетный эквивалентный момент:

Тр.э =1370 Нм  Т = 3320 Нм, следовательно, редуктор ВКУ-500 соответствует требованиям прочности и кинематики механизма
Т = 3320 Нм, следовательно, редуктор ВКУ-500 соответствует требованиям прочности и кинематики механизма
Выбор муфт
По диаметрам концов соединяемых валов выбираем муфты: для быстроходного вала - зубчатую муфту 1 – 1000 – 40 – 2 – 40 – 2 – 2 У2 ГОСТ 5006 – 83; для тихоходного вала - зубчатую муфту 1 – 1000 – 40 – 2 – 40 – 2 – 2 У2 ГОСТ 5006 – 83.
Параметры муфты на быстроходном валу:




Параметры муфты на тихоходном валу:




Выбор тормоза
Сопротивления передвижению тележки создаваемые уклоном:

Сопротивления передвижению тележки создаваемые инерцией:

Сопротивления передвижению тележки создаваемые трением:

Момент, создаваемый уклоном:

Момент, создаваемый инерцией:

Момент, создаваемый силами трения:

где:  радиус ходового колеса, м;
радиус ходового колеса, м;  КПД механизма на участке кинематической цепи «приводное колесо - тормоз».
КПД механизма на участке кинематической цепи «приводное колесо - тормоз».
Расчетный тормозной момент механизма  при работе крана в закрытом помещении определяют при движении без груза под уклон в предположении, что реборды колес не задевают за головки рельсов:
при работе крана в закрытом помещении определяют при движении без груза под уклон в предположении, что реборды колес не задевают за головки рельсов:

Расчетный тормозной момент тормоза равен  т.к. тормоз в механизме один.
т.к. тормоз в механизме один.
Выбираем тормоз типа ТКГ-160 (см. рис.3.6).

Рисунок 3.6. Тормоз серии ТКГ
Таблица 3.6. Основные размеры тормоза
Тормоз ТКГ-160 имеет следующие параметры:





Выбор тормозного шкива
По диаметру конца вала двигателя и требуемому диаметру шкива выбираем стандартный тормозной шкив ТКГ-160 (рисунок 3.7.).

Рисунок 3.7. Тормозной шкив серии ТКГ-160
Шкив имеет следующие параметры:




Список литературы
1. Алексеев Ю. В., Богословский А.П. Крановое электрооборудование. – М.: Энергия, 1979.
2. Казак С.А. Курсовое проектирование грузоподъемных машин. М.: Высшая школа, 1989.
3. Костин В. Ф. Металлургические грузоподъемные машины. – Магнитогорск: ГОУ ВПО МГТУ, 2007.
4. Краузе Г. Н., Кутилин Н. Д. Редукторы: Справ. пособие. – Санкт- Петербург: Машиностроение, 1972.
5. Руденко Н.Ф., Александров М.П. и Лысяков А.Г. Курсовое проектирование грузоподъемных машин. – М.: Машиностроение, 1971.
6. Руденко Н.Ф. и Руденко В.Н. Грузоподъемные машины. Атлас конструкций. М.: Машиностроение, 1970.
Введение
В проблеме осуществления научно-технического прогресса значительная роль отводится подъемно-транспортному машиностроению, перед которым поставлена задача широкого внедрения во всех областях народного хозяйства комплексной механизации и автоматизации производственных процессов, ликвидации ручных погрузочно-разгрузочных работ и исключения тяжелого ручного труда при выполнении основных и вспомогательных технологических операций.
Необходимым является увеличение производства прогрессивных средств механизации подъемно-транспортных, погрузочно-разгрузочных и складских работ. Современные поточные технологические и автоматизированные линии, межцеховой и внутрицеховой транспорт требуют применения разнообразных типов подъемно-транспортных машин и механизмов, обеспечивающих непрерывность и ритмичность производственных процессов. Поэтому подъемно-транспортное оборудование в настоящее время превратилось в один из основных решающих факторов, определяющих эффективность производства. Насыщенность производства средствами механизации трудоемких и тяжелых работ, уровень механизации технологического процесса определяют собой степень совершенства технологического процесса.
Правильный выбор подъемно-транспортного оборудования влияет на нормальную работу и высокую продуктивность производства. Нельзя обеспечить его устойчивый ритм на современной ступени интенсификации без согласованной и безотказной работы современных средств механизации внутрицехового и межцехового транспортирования сырья, полуфабрикатов и готовой продукции на всех стадиях обработки и складирования.
Современные высокопроизводительные грузоподъемные машины, работающие с большими скоростями и обладающие высокой грузоподъемностью, являются результатом постепенного развития этих машин в течение долгого времени. Они непрерывно совершенствуются, поэтому возникают новые задачи по расчету, проектированию, исследованию и выбору оптимальных параметров машин, обеспечивающих высокие технико-экономические показатели и качество машин.
МОСТОВОЙ КРАН ОБЩЕГО НАЗНАЧЕНИЯ


























