ЭЛЕКТРООБОРУДОВАНИЕ КОНЦЕРНА АББ НАПРЯЖЕНИЕМ ДО 1000 В
Методические указания по выполнению лабораторных работ
по дисциплине "Электроснабжение" для студентов 4 курса
факультета Энергетики, обучающихся по направлению
Электроэнергетика и Электротехника.
НОВОСИБИРСК
2016
УДК 658.26(07)
Составили: канд. техн. наук, доцент Н. П. Гужов
канд. техн. наук, доцент В.Я. Ольховский
канд. техн. наук, доцент Н. А. Стрельников
канд. техн. наук, доцент Т.В. Мятеж
Рецензент: канд. техн. наук, доцент В.М. Левин
Работа подготовлена на кафедре «Системы электроснабжения предприятий» НГТУ и является 2 частью. Первая часть была издана в 2011 г.
Новосибирский государственный
технический университет, 2016
Лабораторная работа № 5
АВТОМАТИЧЕСКОЕ ВКЛЮЧЕНИЕ РЕЗЕРВНОГО ПИТАНИЯ ПРИ НАЛИЧИИ ДВУХ НЕЗАВИСИМЫХ ИСТОЧНИКОВ ЭЛЕКТРОЭНЕРГИИ
Цель работы: Знакомство с назначением и существующими устройствами автоматического включения резервного питания (АВР) для трансформаторных подстанций и прочих центров питания при наличии двух источников электроэнергии. Изучение конкретного устройства АВР на основе демонстрационного стенда оборудования и элементов компании АВВ.
Теоретические сведения
Обеспечения надежности - одна из важнейших задач систем электроснабжения. В соответствии со статистическими данными, успешность срабатывания АВР составляет 90–95 %. Простота схем и высокая эффективность обусловили широкое применение АВР на электростанциях, в электрических сетях общего назначения и системах электроснабжения. АВР широко применяется для обеспечения надёжности питания потребителей и электроприёмников первой и особой категорий при наличии двух независимых источников электроэнергии. Отказ основного источника питания возможен при появлении одной из причин:
· штатное срабатывание релейной защиты при появлении повреждений в питающей сети;
· ложное или неселективное срабатывание релейной защиты при появлении повреждений в питающей сети;
· самопроизвольное отключение выключателя (отказ) в головной части питающей линии электропередачи;
· ошибочные действия персонала при проведении ремонтных или наладочных работ, выполнении оперативных переключений;
· повреждение изоляции в цепях оперативного тока (цепи вторичной коммутации), приводящее к отключению выключателей рабочего источника питания и т.д.
В некоторых случаях требуется задержка срабатывания АВР. Например, при запуске мощных двигателей на стороне потребителя, устройство АВР должно игнорировать просадку напряжения, сопровождающую пуск двигателя.
Существует минимальная необходимая продолжительность перерыва питания при действии АВР, которая определяется двумя условиями:
· деионизация среды в месте повреждения в случае короткого замыкания на сборных шинах;
· минимальный ущерб от нарушений технологического процесса потребителя.
Восстановление изоляции шин после отключения неустойчивого повреждения происходит не мгновенно, а лишь через некоторое время, необходимое для деионизации среды, в которой происходило горение электрической дуги. Если напряжение будет подано раньше, чем закончится процесс деионизации, то в месте повреждения возможно повторное зажигание дуги. В этом случае срабатывание АВР будет неуспешным. Оценку условий деионизации среды при повреждениях на шинах следует производить с учетом того обстоятельства, что синхронные и асинхронные электродвигатели могут в течение некоторого времени после отключения трансформаторов поддерживать напряжение в месте повреждения и тем самым поддерживать горение дуги.
Для достижения минимальных нарушений в технологическом процессе потребителя необходимо иметь минимально возможное время действия АВР. В большинстве случаев технологический процесс восстанавливается, после завершения самозапуска электродвигателей. Под самозапуском понимается разгон электродвигателей до их номинальной или рабочей скорости вращения после восстановлении напряжения. При значительной продолжительности перерыва питания электродвигатели выбегают до полной остановки. Это приводит к нарушению технологического процесса производства и появлению ущербов. Устройства АВР должны обеспечивать однократность действия, что необходимо для предотвращения многократного включения резервного питания на неустранившееся короткое замыкание. Многократные включения на существующее короткое замыкание опасны для выключателя, так как они могут привести к полному выходу его из строя без возможности восстановления. Включение резервного источника должно производиться только после отключения выключателя со стороны отказавшего источника. Для обеспечения успешного срабатывания АВР в тех случаях, когда напряжение на шинах у потребителя исчезло, а выключатель рабочего источника питания остался включенным, АВР должны дополняться защитой минимального напряжения. Эта защита должна контролировать наличие напряжения на шинах потребителя и отключать выключатель отказавшего источника питания. Если АВР выполняется на секционном или шинносоединительном выключателе, действие защиты этого выключателя должно ускоряться при оперативном включении и действии АВР для того, чтобы при включении на неустранившееся повреждение отключался этот выключатель, а не выключатель включаемого резервного источника.
Существует несколько вариантов организации автоматического включения резервного питания:
1. Имеется два источника питания (И1 и И2 рис. 5.1). В нормальном режиме используется один − И1 (рабочий). При отказе рабочего источника отключается QF1, а после этого включается QF2, восстанавливая напряжение на шинах гарантированного питания (ШГП).

Рис. 5.1. Схема АВР от двух источников
2.В качестве резервного источника используется локальный генератор G (рис. 5.2).При возникновении сбоя в питании от рабочего источника (И1) устройство АВР автоматически запускает генератор,отключает И1, а после выхода генератора G на рабочий режим включает QF2.

Рис. 5.2. Схема АВР от источника и локального генератора
3. Оба источника И1 и И2 работают одновременно при отключенном секционном выключателе QF3 (рис. 5.3). При отказе одного из источников отключается вводной выключатель отказавшего источника и включается секционный выключатель QF3.

Рис. 5.3. Схема АВР с секционированием ШГП
Простейшие устройства АВР включают резервное питание при исчезновении или глубоком провале напряжения основного источника без каких-либо логических действий. Наиболее совершенные АВР имеют хорошо развитую логику. К числу таких устройств относятся АВР на базе блоков ATS021 и ATS022 компании ABB (рис. 5.4).

Рис. 5.4. Внешний вид блоков АВР ATS021 (справа) и ATS022 (слева)
Блоки АВР ATS021 и ATS022 обеспечивают надежную и безопасную работу электроустановки, соответствуя Российским и мировым стандартам. Возможность коммуникации и дистанционного управления переключением в ручном режиме «местно» и по сети Modbus делают решение полностью удовлетворяющим самые передовые требования. Блоки ATS021 и ATS022 могут быть использованы для реализации схем АВР всех основных категорий электроприемников благодаря широкому набору их возможных режимов работы.
Простота схем подключения для автоматических выключателей серий Tmax XT, Tmax, Emax X1, Emax, использование микропроцессорных технологий для обеспечения логики работы АВР делают блоки ATS удобными и надежными средствами обеспечения бесперебойного питания в сетях низкого напряжения.
При проектировании схемы АВР, основанной на включении секционного выключателя, важно учитывать пропускную способность питающего трансформатора и мощность источника энергии, питающих параллельную систему. В противном случае может получиться так, что переключение на питание от параллельной системы выведет из строя и её, так как источник питания не сможет справиться с суммарной нагрузкой обеих систем сборных шин. В случае если невозможно подобрать такой источник питания, обычно предусматривают такую логику защиты, которая отключит питающие линии менее важных потребителей обеих систем сборных шин.
Порядок выполнения работы
1. Изучить теоретическое введение и описание лабораторной установки.
2. Ознакомиться с внешним видом и изучить назначение элементов управления и сигнализации лицевой панели лабораторного стенда.
3. Изучить принципиальную электрическую схему блока АВР.
4. Подготовить схему АВР и секционный автоматический выключатель к производству испытаний, для чего:
· включить SA1 и SA2;
· проверить состояние секционного выключателя, он должен быть разомкнут (OFF);
· взвести пружины привода секционного выключателя;
· выбрать режим работы моторного привода «Auto» (автоматический).
5. Подать питание на лабораторный стенд.
6. Отметить состояние контактов элементов схемы в таблице 2.1.
7. Имитировать отказ первого источника отключением SA1 и отметить состояние контактов элементов схемы.
8. Имитировать отказ второго источника отключением SA2 и отметить состояние контактов элементов схемы.
9. Подать питание на первый источник включением SA1 и отметить состояние контактов элементов схемы.
10. Подать питание на второй источник включением SA2 и отметить состояние контактов элементов схемы.
11. Изобразить временную диаграмму работы элементов схемы при потере питания первого источника и его последующем восстановлении, в соответствие с рис. 5.22.
12. Оформить отчет по работе.
Содержание отчета
Отчётпо работе должен содержать:
· принципиальную схему блока АВР;
· заполненную таблицу 1;
· временную диаграмму работы элементов схемы при потере питания первого источника и его последующем восстановлении, в соответствие с рис. 5.22;
· выводы.
Таблица 1
|
Состояние
контактов
Действия
| SA1
| KT1
| KT3
| KM1
| KT5
| QF
| KM1
| KT4
| KT2
| SA2
|
|
|
| В
|
|
| В
|
|
| В
|
|
|
|
|
|
| В
| В
|
|
|
|
| Нормальный режим
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Отказ первого источника при наличии напряжения на втором
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Отказ второго источника при отсутствии напряжения на первом
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Восстановление первого источника при отсутствии напряжения на втором
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Восстановление второго источника при наличии напряжения на первом
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обозначения принятые в таблице 1:
- контакты замкнуты;
- контакты замкнуты с выдержкой времени;
- контакты разомкнуты;
- контакты разомкнуты с выдержкой времени.

Рис. 5.22. Шаблон временной диаграммы работы АВР: U1, U2 - наличие напряжения на первом и втором источниках; KM1, KM2 - контакторы,
имитирующие вводные выключатели, включены; QF-секционный
автоматический выключатель включен
5.5. Контрольные вопросы
1. Пояснить назначения АВР и его влияние на надежность электроснабжения потребителей.
2. Какие требования предъявляются при выполнении схем АВР?
3. Принцип действия АВР?
4. Почему включение резервного источника должно происходить только после отключения рабочего?
5. В каких случаях производится запрет срабатывания АВР?
6. В каких случаях осуществляется ускорение действия защиты после АВР и почему?
7. Для чего необходима выдержка времени в пусковом органе минимального напряжения устройства АВР?
8. Для чего в цепи управления контакторами KM1 и KM2 добавлены параллельно включенные контакты SA1.3 и SA2.3 переключателей SA1 и SA2 (рис. 5.20)?
9. Что произойдет если реле времени подключить не параллельно, а последовательно в цепи переключателей имитирующих отказ источников (рис. 5.20)?
10. Объяснить работу схемы (рис. 5.20) при потере питания первого источника и его последующем восстановлении.
11. Построить и пояснить временную диаграмму работы элементов схемы при потере питания первого источника и его последующем восстановлении, в соответствие с рис. 5.22.
Лабораторная работа № 6
Теоретические сведения
6.1.1.Частотно регулируемый электропривод ACS550 фирмы АВВ
Частотно-регулируемые приводы применяются:
§ в прокатных станах (синхронная работа клетей);
§ в конвейерных системах;
§ в резательных автоматах;
§ в станках с ЧПУ — синхронизация движения сразу нескольких осей;
§ в автоматически открывающихся дверях;
§ в мешалках, насосах, вентиляторах, компрессорах;
§ в стиральных машинах;
§ в бытовых инверторных сплит-системах;
§ вна электротранспорте;
§ в текстильной промышленности (для поддержания постоянной скорости и натяжения ткани между различными узлами машины);
§ в системах позиционирования и др.
Наибольший экономический эффект даёт применение ЧРП в системах вентиляции, кондиционирования и водоснабжения, где применение ЧРП стало фактически стандартом.
Преимущества применения ЧРП:
§ экономия электроэнергии в случае переменной нагрузки (то есть работы электродвигателя с неполной нагрузкой);
§ высокая точность регулирования скорости вращения;
§ пусковой момент, равный максимальному;
§ повышенный ресурс оборудования;
§ уменьшение гидравлического сопротивления трубопровода из-за отсутствия регулирующего клапана;
§ плавный пуск двигателя, что значительно уменьшает его износ;
§ управляемое торможение и автоматический перезапуск при исчезновении сетевого напряжения;
§ стабилизация скорости вращения при изменении нагрузки.
Недостатки применения ЧРП:
§ большинство моделей ЧРП являются источником помех;
§ сравнительно высокая стоимость для ЧРП большой мощности.
Структура ЧРП ACS 550: Преобразователи частоты предназначены для преобразования трехфазного напряжения с постоянной частотой 50 Гц в трехфазное напряжение переменной частотой в диапазоне от 0,2 до 400 Гц. Это свойство преобразователей частоты делает возможным их широкое применение для бесступенчатого регулирования скорости любых асинхронных электродвигателей, в том числе электродвигателей компрессоров, лифтов, подъемников и других механизмов. Многообразие функций и высокая надежность, заложенная в преобразователях частоты, делают возможным и выгодным их практическое применение для управления электроприводами различных установок и технологических комплексов.
Преобразователь представляет собой статический преобразователь частоты с промежуточным звеном постоянного тока (рис. 6.1). Преобразователь состоит из двух силовых элементов – неуправляемого выпрямителя и автономного инвертора напряжения. На вход выпрямителя подается нерегулируемое напряжение переменного тока промышленной частоты, которое выпрямляется и подается на инвертор, преобразующий постоянное напряжение в переменное регулируемой амплитуды и частоты.


Рис. 6.1. Структурная схема преобразователя частоты
Выходная частота регулируется в широких пределах и определяется частотой коммутации транзисторов инвертора, которая задается периферийным контроллером, управляемым центральным процессорным устройством. В схеме производится раздельное регулирование амплитуды и частоты выходного напряжения, что позволяет осуществлять требуемое соотношение между действующим значением напряжения и частотой на зажимах асинхронного двигателя в соответствии с требуемым законом управления.
Преобразователь с промежуточным звеном постоянного тока позволяет регулировать частоту как вверх, так и вниз от частоты питающей сети, отличается высоким коэффициентом полезного действия (около 0,96), значительным быстродействием, малыми габаритами, сравнительно высокой надежностью, а также онбесшумен в работе.
Автономный инвертор напряжения – транзисторный. Создание транзисторных преобразователей частоты стало возможным в связи с появлением мощных транзисторов, рассчитанных на напряжение до 1000В и на ток в несколько десятков и даже сотен ампер. Транзисторные преобразователи частоты для регулируемых электроприводов малой и средней мощности являются более перспективными, чем тиристорные. Транзисторный преобразователь частоты более экономичен и надежен из-за меньшего числа переключающих элементов.
Транзисторы отличаются от тиристоров, прежде всего способом управления. Управляющая цепь транзистора может плавно изменять сопротивление и ток главной цепи, а управляющая цепь тиристора может только открыть главную цепь (как ключ), но не может ее закрыть. Хотя это различие в схемах инверторов сглаживается, потому что в инверторах транзисторы, как правило, применяют в ключевом режиме с целью максимального использования допустимой мощности вентиля.
Так как состояние транзисторов непрерывно, т.е. во всех точках оси времени зависит от сигнала управления, то последний в транзисторных инверторах должен иметь вид прямоугольной волны напряжения. Соответственно двум возможным значениям сигнала транзистор занимает одно из двух крайних положений на характеристике.
Другой важной особенностью транзисторов является то, что они могут работатьна более высоких частотах. Это позволяет регулирование напряжения и частоты осуществлять по методу ШИМ, причем несущая частота может во много раз превышать рабочую частоту, достигая десятков килогерц. И хотя транзисторные инверторы с ШИМ и их схемы управления существенно сложнее тиристорных инверторов с межфазной коммутацией, а коэффициент полезного действия их ниже из-за повышенных потерь, связанных с высокой частотой коммутации транзисторов, такие схемы находят применение в весьма перспективных преобразователях частоты, применяемых в приводах с глубоким регулированием скорости. Отличительной особенностью этих инверторов является не только возможность регулирования в них как напряжения, так и частоты от нуля до номинального значения, но и получение формы выходного тока, близкой ксинусоидальной. Это позволяет в таких системах обеспечить весьма широкий диапазон регулирования угловой скорости асинхронного двигателя и уменьшить потери в нем от высших гармоник напряжения. Кроме того, при использовании инверторов с широтно-импульсной модуляцией отпадает необходимость в источнике регулируемого выпрямленного напряжения, что упрощает силовую схему и позволяет получить коэффициент мощности преобразователя, близкий к единице.
Используя принцип широтно-импульсной модуляции, можно обеспечить любую заданную форму тока в нагрузке, в том числе синусоидальную. Принцип действия таких инверторов можно пояснить с помощью эквивалентной схемы, представленной на рис. 6.2. Нагрузка zнвключена в диагональ моста, образованного источниками напряженияЕ/2и полупроводниковым ключом К, который переключается из положения 1в положение 2и наоборот с высокой частотой f, называемой в дальнейшем несущей. Если время Δt1нахождения ключа в положении 1 равно времени Δt2нахождения ключа в положении 2,то среднее значение напряжения на нагрузке равно нулю. В общем случаенапряжение на нагрузке равно
 ,
,
где  =Δt1+Δt2 - период несущей частоты.
=Δt1+Δt2 - период несущей частоты.

Рис. 6.2. К пояснению принципа действия инвертора с ШИМ:
а — эквивалентная схема инвертора с широтно-импульсной
модуляцией посинусоидальному закону; б —диаграмма напряжения
и тока на выходеинвертора
Если при постоянной несущей частоте менять соотношение между Δt1и Δt2в соответствии с синусоидальным законом, то среднее за период несущей частотызначение напряжения на нагрузке также будет меняться по синусоидальному закону с частотой модуляции равной
 ,
,
где Ω − круговая частота модуляции (выходная частота), μ – коэффициент глубины модуляции, показывающий, в каких пределах изменяется длительность интервалов Δt1иΔt2 в течении периода частоты модуляции.При полной модуляции (μ =l) Δt1иΔt2 изменяются от 0 до τ и амплитуда среднего значения напряжения на нагрузке равнаЕ/2. Если нагрузка имеет индуктивный характер, то ток в нагрузке близок к синусоидальному (рис. 6.2б). Таким образом, изменяя значения μ и Ω можно осуществлять независимое регулирование напряжения и частоты тока в нагрузке при постоянной несущей частоте инеизменном по величине питающем напряжении. 
Рис. 6.3. Силовая часть преобразователя частоты
Инвертор питается от сети через неуправляемый выпрямитель В, шунтированный конденсаторомС. В качестве неуправляемого выпрямителя используются шесть диодов, включенных в так называемую мостовую схему для получения трехполупериодного выпрямленного напряжения. Выбор такой схемы выпрямления объясняется тем, что мостовая схема имеет максимальный коэффициент усиления и минимальную амплитуду пульсаций выпрямленного напряжения. Трехфазный мост инвертора И состоит из шести транзисторов, шунтированных диодами для пропускания обратного тока. Преобразование постоянного напряжения в трехфазное переменное осуществляется коммутацией транзисторов VТ1 – VТ6, работающих в определенной последовательности.Последовательность включения тиристоров отвечает их нумерации по схеме, т.е. сначала включается VТ1, через 60° включается VТ2 и так до VТ6. После VТ6 вновь VТ1 и так далее через каждую 1/6 периода выходного напряжения. В каждый момент времени вне коммутации открыты одновременно два транзистора. Включение транзисторов осуществляется подачей управляющего импульса на базу транзистора от периферийного контроллера. В отличие от тиристорного инвертора, где выходное напряжение имеет ступенчатую форму с длительностью каждой ступени 1/6 периода выходного напряжения, характеристики транзисторов позволяют получать на выходе инвертора, переменное напряжение синусоидальной формы, частота которого регулируется изменением частоты подачи импульсов на тиристоры.
Сигнал управления инвертором вырабатывается в центральном процессорном устройстве, затем поступает в периферийный контроллер, где разветвляется на две цепи: управление напряжением — через регулятор напряжения;управление частотой — через блок преобразования напряжения.
Регулятор напряжения модулирует через генератор импульсов и модулятор длительность импульсов сигнала, управляющего транзисторами на несущей частоте, в 60 раз превышающей выходную частоту инвертора. Для управления частотой инверторанесущая частота уменьшается делителем частоты в десять раз, после чего сигнал поступает на кольцевой счетчик, а затем на модулятор.
Программирование инвертора осуществляется при помощи пульта управления. Управление преобразователем частоты осуществляется подачей внешних сигналов на клеммы цепей управления. Разъем пульта RS-485 может использоваться для связи с персональным компьютером или контроллером. По RS-485 возможно управление преобразователем,а такжемониторинг, чтение и запись параметров.
Важная особенность ЧРП состоит в создаваемых ими помехах. Помехи в сети электропитания ЧРП обусловлены тем, что ток, потребляемый ЧРП из сети, является несинусоидальным из-за того, что входным звеном ЧРП служит неуправляемый выпрямитель. Как известно, идеальный неуправляемый выпрямитель с бесконечно большой индуктивностью в цепи выпрямленного тока при синусоидальном напряжении электропитания потребляет несинусоидальный ток, имеющий следующие гармоники:
 ;
;  ,
,
где n – номер гармоники тока, k – натуральный ряд чисел (1,2,3,…), m – число фаз выпрямителя,  действующее значение тока n –ой гармоники.
действующее значение тока n –ой гармоники.
Реальный выпрямитель по своим параметрам далек от идеального, поэтому, как правило, величина гармоник тока для него не соответствует вышеуказанному соотношению.
На рис. 6.4 пунктирной линией показана величина гармоник тока для идеального выпрямителя при m = 6 и сплошной линией для ЧРП АСS550 для режима с номинальными скоростью вращения и нагрузкой.Главной особенностью этого спектра тока является большой уровень токов 5-ой и 7-ой высших гармоник.
На рис. 6.5 изображенаосциллограмма тока, потребляемого ЧРП из сети.Высокий уровень высших гармоник тока, потребляемого из сети, является важным недостатком данного ЧРП.

Рис. 6.4. Спектральный состав тока
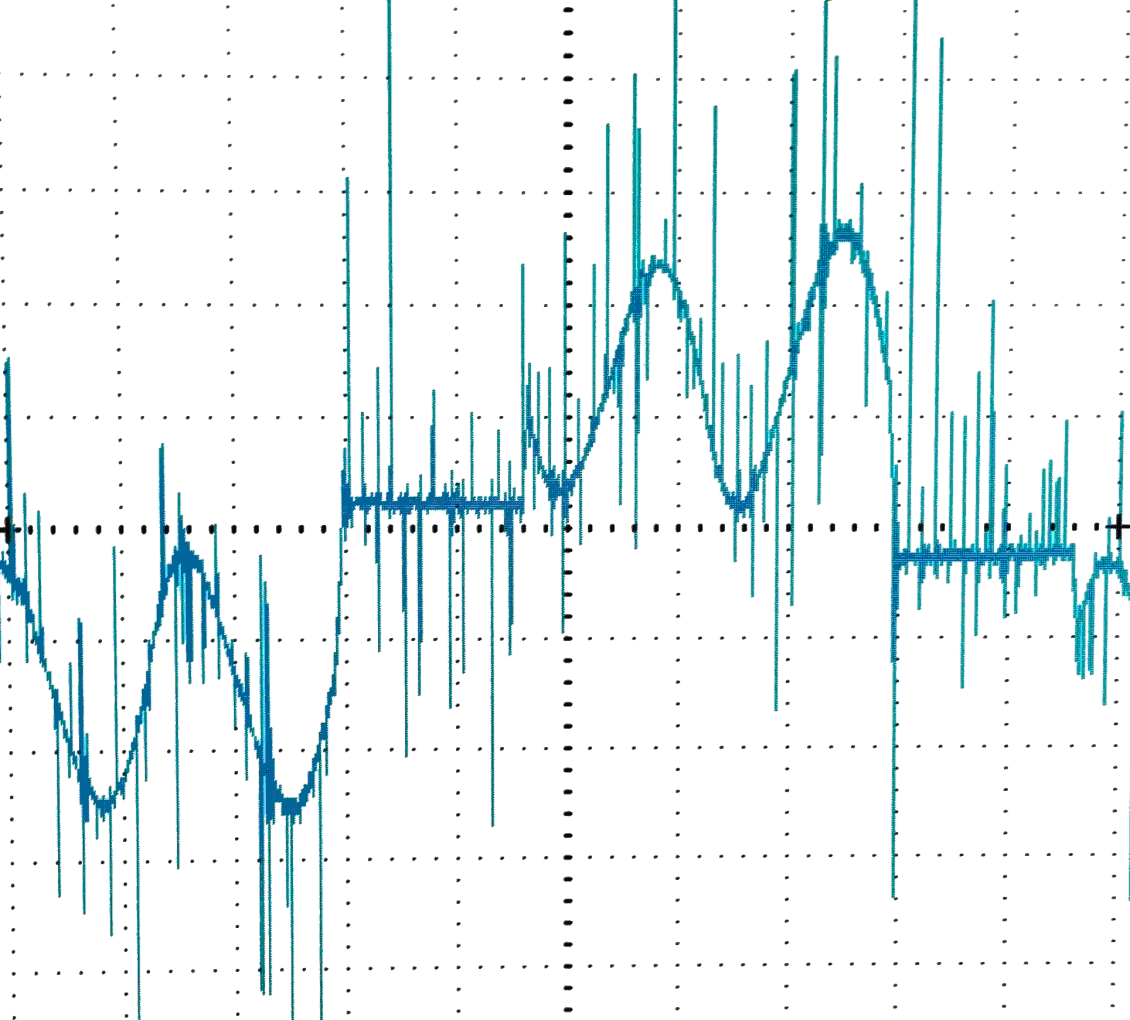
Рис. 6.5. Кривая мгновенных значений тока, потребляемого ЧРП из сети
На осциллограмме сетевого тока наблюдается работа ШИМ в виде «гребенки» что иллюстрирует слабую защищенность измерительных цепей осциллографа от работы ШИМ.
6.1.2. Рабочие характеристики асинхронного двигателя
Рабочие характеристики АД – это зависимость параметров режимов работы двигателя от величины мощности или от коэффициента загрузки на валу:  ,
,
где  – мощность на валу двигателя,
– мощность на валу двигателя,  номинальная мощность двигателя. Рабочие характеристики полностью определяют свойства АД, как потребителя электроэнергии.Паспортные данные асинхронного двигателя, установленного в стенде, приведены в приложении 6.2.
номинальная мощность двигателя. Рабочие характеристики полностью определяют свойства АД, как потребителя электроэнергии.Паспортные данные асинхронного двигателя, установленного в стенде, приведены в приложении 6.2.
Параметры АД и особенности его режимов работы удобно анализировать с помощью Т-образной эквивалентной схемы замещения (рис. 6.6).

Рис. 6.6. Эквивалентная схема замещения АД
Параметры схемы замещения:
 - активное сопротивление одной фазы обмотки статора, Ом;
- активное сопротивление одной фазы обмотки статора, Ом;
 - индуктивное сопротивление рассеяния фазы обмотки статора, Ом;
- индуктивное сопротивление рассеяния фазы обмотки статора, Ом;
 - индуктивное сопротивление цепи намагничивания, определяемое величиной ЕДС
- индуктивное сопротивление цепи намагничивания, определяемое величиной ЕДС  , Ом;
, Ом;
 - активное сопротивление цепи намагничивания, обусловленное магнитными потерями (потери в стали), Ом;
- активное сопротивление цепи намагничивания, обусловленное магнитными потерями (потери в стали), Ом;
 - активное сопротивление фазы обмотки ротора, приведенное к обмотке статора, Ом;
- активное сопротивление фазы обмотки ротора, приведенное к обмотке статора, Ом;
Х2́ - индуктивное сопротивление рассеяния обмотки ротора, приведенное к обмотке статора, Ом;
 – добавочное сопротивление, соответствующее механической мощности, развиваемой на валу двигателя, Ом.
– добавочное сопротивление, соответствующее механической мощности, развиваемой на валу двигателя, Ом.
Для частоты, отличной от номинальной ( , численные значения параметров эквивалентной схемы изменятся в соответствии с изменением частоты:
, численные значения параметров эквивалентной схемы изменятся в соответствии с изменением частоты:  ;
; 
Параметры режима работы АД:
 – фазное напряжение на зажимах двигателя;
– фазное напряжение на зажимах двигателя;
 – ток фазы обмотки статора;
– ток фазы обмотки статора;
 - ток намагничивания, создающий основной магнитный поток АД;
- ток намагничивания, создающий основной магнитный поток АД;
 – ЭДС, индуктированная в обмотке статора (ротора) результирующим магнитным потоком;
– ЭДС, индуктированная в обмотке статора (ротора) результирующим магнитным потоком;
̕  - ток фазы обмотки ротора, приведенный к обмотке статора;
- ток фазы обмотки ротора, приведенный к обмотке статора;
 - потери в трехфазной обмотке статора;
- потери в трехфазной обмотке статора;
 - магнитные потери (потери в стали) двигателя;
- магнитные потери (потери в стали) двигателя;
 - потери в обмотках ротора;
- потери в обмотках ротора;
 - механическая мощность на валу двигателя;
- механическая мощность на валу двигателя;
 - механические потери на трение в подшипниках и вентиляцию, входящие в величину РВ (на эквивалентной схеме не отражены);
- механические потери на трение в подшипниках и вентиляцию, входящие в величину РВ (на эквивалентной схеме не отражены);
 ;
;
 – добавочные потери (на эквивалентной схеме не отражены);
– добавочные потери (на эквивалентной схеме не отражены);
 – реактивная мощность рассеяния обмоток статора;
– реактивная мощность рассеяния обмоток статора;
 - реактивная мощность намагничивания;
- реактивная мощность намагничивания;
 - реактивная мощность рассеяния обмоток ротора;
- реактивная мощность рассеяния обмоток ротора;
 - активная мощность, потребляемая двигателем из сети (мощность на валу плюс потери);
- активная мощность, потребляемая двигателем из сети (мощность на валу плюс потери);
 – реактивная мощность, потребляемая двигателем из сети;
– реактивная мощность, потребляемая двигателем из сети;
 – скольжение АД, зависящее от нагрузки двигателя и напряжения на зажимах.
– скольжение АД, зависящее от нагрузки двигателя и напряжения на зажимах.
Рабочие характеристики установленного в учебном стенде двигателя приведены на рис. 6.7 ÷ 6.9.
Рис. 6.7. Рабочие характеристики АД: 
|
Для точного построения рабочих характеристик требуются численные значения всех параметров схемы замещения двигателя (рис. 6.6). Эти параметры, как правило, не указываются производителями в паспортных данных двигателей, поэтому на рис. 6.7 приведен приближенный вид рабочих характеристик, построенных по двум точкам с учетом следующего:потери в двигателе при номинальной нагрузке на валу составляют 0,57 кВт (приложение 6.2); приняты потери холостого хода  , т.к. для асинхронных двигателей, как правило, при загрузке близкой к полной, потери холостого хода (постоянные потери) равнынагрузочным потерям (переменным); нагрузочные потери при
, т.к. для асинхронных двигателей, как правило, при загрузке близкой к полной, потери холостого хода (постоянные потери) равнынагрузочным потерям (переменным); нагрузочные потери при  также приняты равными 0,28 кВт.
также приняты равными 0,28 кВт.
Реактивная мощность (реактивные потери) при  определяются номинальным коэффициентом мощности, равным 0,65 (приложение 6.2).
определяются номинальным коэффициентом мощности, равным 0,65 (приложение 6.2).
Рис. 6.8. Рабочие характеристики  ,
, 
Номинальная реактивная мощность:  Реактивные потери холостого хода можно определить приближенно, приняв ток холостого хода двигателя:
Реактивные потери холостого хода можно определить приближенно, приняв ток холостого хода двигателя:
 ,
,  ,
,

Ток двигателя при изменении  от нуля до единицы изменяется нелинейно от 1,38 А при холостом ходе до 4,6 А при номинальной нагрузке (рис. 6.8). Нелинейность, в основном, вызвана тем, что при малой загрузке двигателя индуктивная составляющая тока намного больше активной, а при возрастании нагрузки двигателя, рост активной составляющей тока, которая прибавляется к реактивной составляющей под углом
от нуля до единицы изменяется нелинейно от 1,38 А при холостом ходе до 4,6 А при номинальной нагрузке (рис. 6.8). Нелинейность, в основном, вызвана тем, что при малой загрузке двигателя индуктивная составляющая тока намного больше активной, а при возрастании нагрузки двигателя, рост активной составляющей тока, которая прибавляется к реактивной составляющей под углом  , вначале не приводит к существенному росту полного тока. В области малых нагрузок в токе превалирует реактивная составляющая и коэффициент мощности уменьшается до значения cosφ = 0,2.
, вначале не приводит к существенному росту полного тока. В области малых нагрузок в токе превалирует реактивная составляющая и коэффициент мощности уменьшается до значения cosφ = 0,2.
На рис. 6.9 приведена кривая зависимости  и ƞ = f(
и ƞ = f( .
.
| Ƞ, сosϕ
1,0
0,8
0,6
0,4
0,2
0
|
Рис. 6.9. Рабочие характеристики иƞ=f(
|
Максимальный КПД АД, а также максимальное значение коэффициента мощности обычно лежат в диапазоне kЗ=0,8 – 1,0 (рис. 6.9).
Для АД потери часто разделяют на постоянные (не зависящие от нагрузки)  и переменные (зависящие от загрузки АД) ∆
и переменные (зависящие от загрузки АД) ∆  :
:
 ;
;
 ,
,
где  активные и реактивные потери холостого хода, не зависящие от нагрузки;
активные и реактивные потери холостого хода, не зависящие от нагрузки;  – активные и реактивные потери в обмотках статора и ротора при номинальной нагрузке и номинальной частоте питающего напряжения.
– активные и реактивные потери в обмотках статора и ротора при номинальной нагрузке и номинальной частоте питающего напряжения.
При изменении (регулировании) частоты п






