Основные понятия: направление и модуль вектора линейной скорости, направление и модуль вектора центростремительного ускорения, угол поворота, длина дуги, угловая скорость, период и частота вращения, число оборотов.

 – линейная скорость точки,
– линейная скорость точки,  ;
;
 – угловая скорость вращения,
– угловая скорость вращения,  ;
;
 - угол поворота радиуса-вектора точки, движущейся по окружности,
- угол поворота радиуса-вектора точки, движущейся по окружности,  ;
;
R – радиус вращения,  ;
;
T – период вращения,  ;
;
 – частота вращения,
– частота вращения,  ;
;
 - центростремительное (нормальное) ускорение,
- центростремительное (нормальное) ускорение,  ;
;
S – путь, равный длине дуги окружности,  ;
;
N – число оборотов.
Основные формулы:
 ;
;

 ;
;  ;
;  ;
;

4. Относительность движения: система отсчёта (подвижная и неподвижная), абсолютная, относительная и переносная скорости, преобразования Галилея для скоростей и ускорений, принцип относительности Галилея.
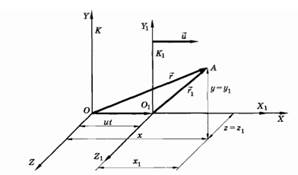 Преобразования Галилея.
Преобразования Галилея.
Система отсчёта K1 движется со скоростью  относительно системы отсчёта K так, чтооси X,Y,Z и X1,Y1,Z1 остаются параллельными.
относительно системы отсчёта K так, чтооси X,Y,Z и X1,Y1,Z1 остаются параллельными.
1) Преобразование координат: 
2) Закон сложения скоростей:
 или
или 
 – абсолютная скорость – скорость тела в неподвижной системе отсчёта;
– абсолютная скорость – скорость тела в неподвижной системе отсчёта;
 – относительная скорость – скорость тела в подвижной системе отсчёта;
– относительная скорость – скорость тела в подвижной системе отсчёта;

 – переносная скорость – скорость подвижной системы отсчёта относительно неподвижной.
– переносная скорость – скорость подвижной системы отсчёта относительно неподвижной.
Скорость  первого тела, движущегося со скоростью
первого тела, движущегося со скоростью  , относительно второго тела, движущегося со скоростью
, относительно второго тела, движущегося со скоростью  , определяется формулой:
, определяется формулой:  .
.
3) Преобразование ускорений (система отсчёта K1 движется со ускорением  относительно системы отсчёта K, не вращаясь, так, чтооси X,Y,Z и X1,Y1,Z1 остаются параллельными):
относительно системы отсчёта K, не вращаясь, так, чтооси X,Y,Z и X1,Y1,Z1 остаются параллельными):

Если системы отсчёта K1 движется равномерно и прямолинейно относительно системы отсчёта K, то есть  , то ускорение одинаково, или абсолютно.
, то ускорение одинаково, или абсолютно.
4) Принцип относительности Галилея: все механические явления в инерциальных системах отсчёта протекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного и прямолинейного движения.
Динамика.
Основные понятия: 3 закона механики Ньютона, инерциальные и неинерциальные системы отсчёта (примеры), инерция, 4 типа фундаментальных взаимодействий, силы (сила тяжести, сила реакции опоры, сила упругости, сила натяжения нити, сила трения), вес тела, невесомость, масса тела (инертная и гравитационная), неподвижный и подвижный блоки, движение со связями, закон всемирного тяготения, гравитационная постоянная, первая и вторая космические скорости, зависимость ускорения свободного падения от высоты над планетой.
1. Первый закон Ньютона: существуют системы отсчёта, называемые инерциальными, в которых тела движутся равномерно и прямолинейно или покоятся, если на них не действуют другие тела.
Если относительно какой-либо системы отсчёта тело движется с ускорением, не вызванным действием на него других тел, то такую систему называют неинерциальной.
Любое тело, движущееся равномерно и прямолинейно или покоящееся, можно считать инерциальной системой отсчёта. Тело, движущееся равномерно по окружности, является неинерциальной системой отсчёта.
Любое тело, движущееся с ускорением в инерциальной системе отсчёта, является неинерциальной системой отсчёта.
Инерция – движение, при котором тело сохраняет свою скорость.
Масса тела.
Величину  , равную отношению модуля силы к модулю ускорения тела, называют инертной массой
, равную отношению модуля силы к модулю ускорения тела, называют инертной массой  тела.
тела.
Масса является мерой инертности тела. Инертностью называется свойство тела сохранять свою скорость неизменной (в инерциальной системе отсчёта), когда внешние воздействия отсутствуют или компенсируют друг друга. При наличии внешних воздействий инертность тела проявляется в том, что его скорость меняется не мгновенно, а постепенно, и тем медленнее, чем больше инертность тела, то есть его масса.
Массы тел также являются причиной их гравитационного притяжения друг к другу (об этом подробнее в теме “закон всемирного тяготения”).
Массу, определяющую способность тел притягиваться друг к другу, называют гравитационной массой  .
.
Из многочисленных опытов механики следует, что  .
.
Таким образом, масса тела – это количественная мера его инертных и гравитационных свойств.
Масса служит мерой содержащегося в теле вещества. Плотностью однородного тела называется отношение массы тела к его объёму:
 ,
, 
3. Второй закон Ньютона: произведение массы тела на вектор ускорения есть равнодействующая всех сил, приложенных к телу:
 ,
,
Справедливы следующие утверждения:
1.  , где a — модуль ускорения, F — модуль равнодействующей силы.
, где a — модуль ускорения, F — модуль равнодействующей силы.
2. Вектор ускорения  сонаправлен с вектором равнодействующей силы
сонаправлен с вектором равнодействующей силы  , так как масса тела положительна.
, так как масса тела положительна.
Третий закон Ньютона: два тела действуют друг на друга с силами, равными по модулю и противоположными по направлению. Эти силы имеют одну и ту же физическую природу и направлены вдоль прямой, соединяющей их точки приложения.

 .
.
Вес тела  и сила реакции опоры
и сила реакции опоры  являются примерами сил действия и противодействия, связанных третьим законом Ньютона:
являются примерами сил действия и противодействия, связанных третьим законом Ньютона:

Силы. Виды сил.
Cила – количественная мера взаимодействия тел.
Фундаментальные взаимодействия определяют 4 вида сил в природе:
1) электромагнитные: сила трения, сила упругости, сила реакции опоры;
2) гравитационные: сила тяжести, сила тяготения;
3) ядерные силы (силы сильного взаимодействия);
4) силы слабого взаимодействия (удерживают элементарные частицы от распада).
Сила тяжести – сила, действующая на тело со стороны Земли. Эта сила приложена в центре тяжести тела.

Сила реакции опоры, сила нормального давления, вес тела.
1) – сила реакции опоры – сила, с которой опора действует на тело.
2)  сила нормального давления – сила, с которой тело давит на опору.
сила нормального давления – сила, с которой тело давит на опору.
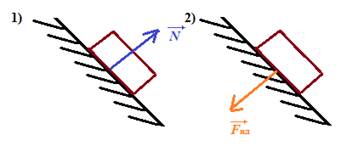
Обе силы перпендикулярны поверхности соприкосновения тел, равны по модули и противоположны по направлению:  ,
, 
 3) Вес тела - сила, с которой тело действует на опору или подвес. Из определения вес тела и сила нормального давления понятия равнозначные. Вес тела равен по модулю силе реакции опоры и противоположен ей по направлению:
3) Вес тела - сила, с которой тело действует на опору или подвес. Из определения вес тела и сила нормального давления понятия равнозначные. Вес тела равен по модулю силе реакции опоры и противоположен ей по направлению:  ,
,  На рисунке изображены силы тяжести, реакции опоры и вес тела. Силы тяжести и реакции опоры действуют на тело, сила реакции опоры действует на опору.
На рисунке изображены силы тяжести, реакции опоры и вес тела. Силы тяжести и реакции опоры действуют на тело, сила реакции опоры действует на опору.
Состояние, при котором вес тела равен нулю, называется состоянием невесомости. В таком состоянии тело не давит на опору и не растягивает подвес. Свободное падение тела является примером невесомости.

 Сила натяжения нити
Сила натяжения нити  – сила, с которой нить (подвес) действует на тело. Эта сила направлена по нити. Если тела связаны невесомой нитью, то натянутая нить действует с одинаковыми силами как на одно, так и на другое тело.
– сила, с которой нить (подвес) действует на тело. Эта сила направлена по нити. Если тела связаны невесомой нитью, то натянутая нить действует с одинаковыми силами как на одно, так и на другое тело.
Сила трения – сила сопротивления, возникающая при относительном перемещении прижатых друг к другу тел. Эта сила направлена по касательной к поверхности соприкосновения тел и противоположно направлению перемещения данного тела.
1) Случай подвижного тела – возникает cила трения скольжения:

где  – коэффициент трения скольжения (
– коэффициент трения скольжения ( ).
).

2) Случай неподвижного тела – возникает cила трения покоя:
 .
.
Сила трения не зависит от площади соприкосновения поверхностей, а определяется коэффициентом трения поверхностей и модулем силы реакции опоры.
Сила упругости – это сила, возникающая при упругой деформации тела и направленная в сторону, противоположную смещению частиц тела в процессе деформации. Сила упругости:
1) действует между соседними слоями деформированного тела и приложена к каждому слою;
2) действует со стороны деформированного тела на соприкасающееся с ним тело, вызывающее деформацию, и приложена в месте контакта данных тел перпендикулярно их поверхностям (типичный пример — сила реакции опоры).
Закон Гука. Модуль силы упругости прямо пропорционален величине деформации. В частности, для пружины, сжатой или растянутой на величину x, сила упругости даётся формулой:
F = kx,
где k — коэффициент жёсткости пружины (жёсткость).
Коэффициент жёсткости k зависит не только от материала пружины, но также от её формы и размеров.
Закон Гука в векторной форме:
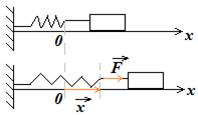
 .
.
Знак  показывает, что сила упругости направлена в противоположную сторону деформации.
показывает, что сила упругости направлена в противоположную сторону деформации.
Закон Гука справедлив только при малых деформациях.
Динамометр – прибор для измерения силы. Использование динамометра основано на том факте, что сила упругости пружины в определённых пределах прямо пропорциональна её деформации. По длине растянутой пружины можно судить о значении приложенной силы.

При параллельном соединении пружин жесткость системы равна:  .
.
При последовательном соединении пружин жесткость системы равна:  .
.

Типовые задачи
1) Тело массой 100 г движется по шероховатой горизонтальной поверхности под действием силы F=2 Н, направленной под углом 300 к горизонтали. Определите ускорение тела. Коэффициент трения поверхности 
2) Тело массой m скользит без начальной скорости вниз по наклонной плоскости с углом наклона α. Определите ускорение тела в случае: а) трение о плоскость отсутствует; б) коэффициент трения тела о плоскость равен . При каком коэффициенте трения ещё возможно скольжение?
 3) Тело массой 1 кг лежит на горизонтальной поверхности. К нему в горизонтальном направлении прикладывают силу F. Коэффициент трения тела о плоскость равен 0,4. Определить ускорение тела и величину силы трения, если: а) F =5 Н; б) F =3 Н.
3) Тело массой 1 кг лежит на горизонтальной поверхности. К нему в горизонтальном направлении прикладывают силу F. Коэффициент трения тела о плоскость равен 0,4. Определить ускорение тела и величину силы трения, если: а) F =5 Н; б) F =3 Н.
4) Верёвка удерживает тело массой m на гладкой наклонной плоскости с углом наклона α. Определите силу натяжения нити.
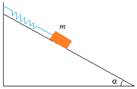 5) Пружина с жёсткостью
5) Пружина с жёсткостью  удерживает тело массой m на гладкой наклонной плоскости с углом наклона α. На какую величину растянута пружина?
удерживает тело массой m на гладкой наклонной плоскости с углом наклона α. На какую величину растянута пружина?
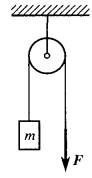 6) К одному концу верёвки, перекинутой через блок, подвешен груз массы m =10 кг. С какой силой F нужно тянуть вниз за другой конец верёвки, чтобы груз поднимался с ускорением a =1 м/с2 ?
6) К одному концу верёвки, перекинутой через блок, подвешен груз массы m =10 кг. С какой силой F нужно тянуть вниз за другой конец верёвки, чтобы груз поднимался с ускорением a =1 м/с2 ?
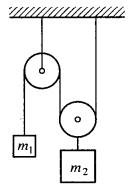 7) Найти силу натяжения нити в устройстве, изображённом на рисунке, если массы тел
7) Найти силу натяжения нити в устройстве, изображённом на рисунке, если массы тел  и
и  .
.
8) В покоящемся лифте лежит брусок массой m. Каким будет вес бруска при движении лифта:
а) вверх со скоростью v, вниз со скоростью v;
б) вверх ускоренно с ускорением a<g;
в) вниз ускоренно с ускорением a<g;
г) вверх замедленно с ускорением a<g;
д) вниз замедленно с ускорением a<g?
Закон всемирного тяготения.
Закон всемирного тяготения был открыт Исааком Ньютоном. Ньютон был первым, кто сначала догадался, а потом и строго доказал, что причина, вызывающая падение камня на Землю, движение Луны вокруг Земли и планет вокруг Солнца, одна и та же. Это сила тяготения, действующая между любыми телами Вселенной. Вот ход его рассуждений: ”Брошенный горизонтально камень отклонится под действием тяжести от прямолинейного пути и, описав кривую траекторию, упадёт наконец на Землю. Если его бросить с большей скоростью, то он упадёт дальше”. Продолжая эти рассуждения, Ньютон приходит к выводу, что если бы не сопротивление воздуха, то траектория камня, брошенного с высокой горы с определённой скоростью, могла бы стать такой, что он вообще никогда не достиг бы поверхности Земли, а двигался вокруг неё подобно тому, как планеты описывают в небесном пространстве свои орбиты.

Итак, по мнению Ньютона, движение Луны вокруг Земли или планет вокруг Солнца – это тоже свободное падение, но только падение, которое длится, не прекращаясь, миллиарды лет. Причиной такого “падения” является сила всемирного тяготения.

Сила взаимного притяжения двух тел прямо пропорциональна произведению масс этих тел и обратно пропорциональна квадрату расстояния между ними. Коэффициент пропорциональности G называется гравитационной постоянной.
Гравитационная постоянная была измерена в опыте Кавендиша с крутильными весами.
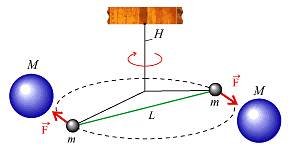
Рисунок. Опыт Кавендиша
О силе притяжения: сила, с которой первое тело массой m1 притягивает второе тело массой m2 равна по модулю и противоположна по направлению силе, с которой второе тело притягивает первое тело. Этот вывод следует из 3-го закона Ньютона: сила действия равна силе противодействия.
 ,
,  .
.

Закон всемирного тяготения справедлив только для материальных точек. При этом силы гравитационного взаимодействия направлены вдоль линии, соединяющей эти точки. Обобщая закон всемирного тяготения на тела любой формы, следует сказать, что сила притяжения приложена к центру тяжести тела (к центру шара в случае тела шарообразной формы тела). Тогда расстоянием R между телами считается расстояние между их центрами тяжести.








