Механика
Санкт Петербург, 2014
ПЕРЕЧЕНЬ НЕОБХОДИМЫХ ОПРЕДЕЛЕНИЙ, ФОРМУЛ И УМЕНИЙ ДЛЯ СДАЧИ ЕГЭ ПО ФИЗИКЕ
Кинематика.
Равномерное и равнопеременное движения.
Основные понятия: вектор перемещения, траектория, путь, координата, скорость, вектор скорости, мгновенная скорость, проекция вектора скорости, средняя (путевая) скорость, ускорение, вектор ускорения, мгновенное ускорение, проекция вектора ускорения, виды движения (прямолинейное, криволинейное, равномерное, ускоренное, замедленное, равнопеременное, поступательное, вращательное, плоскопараллельное).
Основные формулы кинематики:

 ;
;

 ;
;

 ;
;  (при равнопеременном движении);
(при равнопеременном движении);
 .
.
 .
.
Равнопеременное прямолинейное движение.
Формулы для вычисления пройденного пути:
 (формула без ускорения);
(формула без ускорения);
 (формула без времени);
(формула без времени);
 .
.
Перемещение за n-ю секунду:

Связь координаты, скорости и ускорения:  .
.
 Экзаменуемый должен уметь строить и анализировать графики зависимостей
Экзаменуемый должен уметь строить и анализировать графики зависимостей  , уметь находить пройденный путь по графикам
, уметь находить пройденный путь по графикам  и
и  , строить графики по таблицам. Путь, пройденный телом при любом движении, численно равен площади под графиком зависимости скорости от времени на заданном промежутке времени.
, строить графики по таблицам. Путь, пройденный телом при любом движении, численно равен площади под графиком зависимости скорости от времени на заданном промежутке времени.
Свободное падение.
Основные понятия: ускорение  (модуль и направление), независимость ускорения свободного падения от массы тела, основные формулы и графики при движении вверх и вниз.
(модуль и направление), независимость ускорения свободного падения от массы тела, основные формулы и графики при движении вверх и вниз.
Уравнения координаты и проекции скорости:
 ;
; 
 ;
;  .
.
 Уравнения координаты и проекции скорости:
Уравнения координаты и проекции скорости:
-при движении вверх (равнозамедленном):
 ;
;  .
.
 - при движении вниз (равноускоренном):
- при движении вниз (равноускоренном):
 ;
;  (
(
Время свободного падения на землю без начальной скорости:
 .
.
Перемещение, высота:
 ;
;  ;
;  .
.
Горизонтальный бросок: движение по 2 осям, формулы и графики, направление вектора скорости, разложение вектора скорости по 2 составляющим.
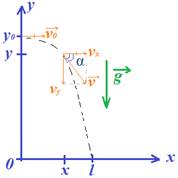 Основные формулы:
Основные формулы:
 ;
; 
; 
проекции начальной скорости: 
проекции скорости в любой момент времени:

 ;
;
модуль мгновенной скорости:  ;
;
угол наклона вектора скорости к горизонту:  ;
;
горизонтальное смещение:  ;
;
время падения на землю: ;
начальная высота:  ;
;
мгновенная высота:  ;
;
дальность полёта: 
уравнение траектории полёта:  .
.
 Движение тела, брошенного под углом к горизонту: движение по 2 осям (в проекции на ось 0x – равномерное движение, в проекции на ось 0y – движение с постоянным ускорением), направление вектора скорости, разложение вектора скорости по 2 составляющим.
Движение тела, брошенного под углом к горизонту: движение по 2 осям (в проекции на ось 0x – равномерное движение, в проекции на ось 0y – движение с постоянным ускорением), направление вектора скорости, разложение вектора скорости по 2 составляющим.
Основные формулы:
проекции начальной скорости:
 ;
;
проекции мгновенной скорости:

 ;
;
модуль мгновенной скорости: ;
скорость в верхней точке траектории:  ;
;
угол наклона вектора скорости к горизонту:
 ;
;
горизонтальное смещение:  ;
;
уравнение координаты y (мгновенная высота): ;
 ;
;
время подъёма (спуска):  ;
;
время полёта:  ;
;
наибольшая высота подъёма:  ;
;
дальность полёта:  ;
;
уравнение траектории полёта:  .
.
Отработать построение и анализ графиков зависимостей:

Динамика.
Основные понятия: 3 закона механики Ньютона, инерциальные и неинерциальные системы отсчёта (примеры), инерция, 4 типа фундаментальных взаимодействий, силы (сила тяжести, сила реакции опоры, сила упругости, сила натяжения нити, сила трения), вес тела, невесомость, масса тела (инертная и гравитационная), неподвижный и подвижный блоки, движение со связями, закон всемирного тяготения, гравитационная постоянная, первая и вторая космические скорости, зависимость ускорения свободного падения от высоты над планетой.
1. Первый закон Ньютона: существуют системы отсчёта, называемые инерциальными, в которых тела движутся равномерно и прямолинейно или покоятся, если на них не действуют другие тела.
Если относительно какой-либо системы отсчёта тело движется с ускорением, не вызванным действием на него других тел, то такую систему называют неинерциальной.
Любое тело, движущееся равномерно и прямолинейно или покоящееся, можно считать инерциальной системой отсчёта. Тело, движущееся равномерно по окружности, является неинерциальной системой отсчёта.
Любое тело, движущееся с ускорением в инерциальной системе отсчёта, является неинерциальной системой отсчёта.
Инерция – движение, при котором тело сохраняет свою скорость.
Масса тела.
Величину  , равную отношению модуля силы к модулю ускорения тела, называют инертной массой
, равную отношению модуля силы к модулю ускорения тела, называют инертной массой  тела.
тела.
Масса является мерой инертности тела. Инертностью называется свойство тела сохранять свою скорость неизменной (в инерциальной системе отсчёта), когда внешние воздействия отсутствуют или компенсируют друг друга. При наличии внешних воздействий инертность тела проявляется в том, что его скорость меняется не мгновенно, а постепенно, и тем медленнее, чем больше инертность тела, то есть его масса.
Массы тел также являются причиной их гравитационного притяжения друг к другу (об этом подробнее в теме “закон всемирного тяготения”).
Массу, определяющую способность тел притягиваться друг к другу, называют гравитационной массой  .
.
Из многочисленных опытов механики следует, что  .
.
Таким образом, масса тела – это количественная мера его инертных и гравитационных свойств.
Масса служит мерой содержащегося в теле вещества. Плотностью однородного тела называется отношение массы тела к его объёму:
 ,
, 
3. Второй закон Ньютона: произведение массы тела на вектор ускорения есть равнодействующая всех сил, приложенных к телу:
 ,
,
Справедливы следующие утверждения:
1.  , где a — модуль ускорения, F — модуль равнодействующей силы.
, где a — модуль ускорения, F — модуль равнодействующей силы.
2. Вектор ускорения  сонаправлен с вектором равнодействующей силы
сонаправлен с вектором равнодействующей силы  , так как масса тела положительна.
, так как масса тела положительна.
Третий закон Ньютона: два тела действуют друг на друга с силами, равными по модулю и противоположными по направлению. Эти силы имеют одну и ту же физическую природу и направлены вдоль прямой, соединяющей их точки приложения.

 .
.
Вес тела  и сила реакции опоры
и сила реакции опоры  являются примерами сил действия и противодействия, связанных третьим законом Ньютона:
являются примерами сил действия и противодействия, связанных третьим законом Ньютона:

Силы. Виды сил.
Cила – количественная мера взаимодействия тел.
Фундаментальные взаимодействия определяют 4 вида сил в природе:
1) электромагнитные: сила трения, сила упругости, сила реакции опоры;
2) гравитационные: сила тяжести, сила тяготения;
3) ядерные силы (силы сильного взаимодействия);
4) силы слабого взаимодействия (удерживают элементарные частицы от распада).
Сила тяжести – сила, действующая на тело со стороны Земли. Эта сила приложена в центре тяжести тела.

Сила реакции опоры, сила нормального давления, вес тела.
1) – сила реакции опоры – сила, с которой опора действует на тело.
2)  сила нормального давления – сила, с которой тело давит на опору.
сила нормального давления – сила, с которой тело давит на опору.
Обе силы перпендикулярны поверхности соприкосновения тел, равны по модули и противоположны по направлению:  ,
, 
 3) Вес тела - сила, с которой тело действует на опору или подвес. Из определения вес тела и сила нормального давления понятия равнозначные. Вес тела равен по модулю силе реакции опоры и противоположен ей по направлению:
3) Вес тела - сила, с которой тело действует на опору или подвес. Из определения вес тела и сила нормального давления понятия равнозначные. Вес тела равен по модулю силе реакции опоры и противоположен ей по направлению:  ,
,  На рисунке изображены силы тяжести, реакции опоры и вес тела. Силы тяжести и реакции опоры действуют на тело, сила реакции опоры действует на опору.
На рисунке изображены силы тяжести, реакции опоры и вес тела. Силы тяжести и реакции опоры действуют на тело, сила реакции опоры действует на опору.
Состояние, при котором вес тела равен нулю, называется состоянием невесомости. В таком состоянии тело не давит на опору и не растягивает подвес. Свободное падение тела является примером невесомости.

 Сила натяжения нити
Сила натяжения нити  – сила, с которой нить (подвес) действует на тело. Эта сила направлена по нити. Если тела связаны невесомой нитью, то натянутая нить действует с одинаковыми силами как на одно, так и на другое тело.
– сила, с которой нить (подвес) действует на тело. Эта сила направлена по нити. Если тела связаны невесомой нитью, то натянутая нить действует с одинаковыми силами как на одно, так и на другое тело.
Сила трения – сила сопротивления, возникающая при относительном перемещении прижатых друг к другу тел. Эта сила направлена по касательной к поверхности соприкосновения тел и противоположно направлению перемещения данного тела.
1) Случай подвижного тела – возникает cила трения скольжения:

где  – коэффициент трения скольжения (
– коэффициент трения скольжения ( ).
).

2) Случай неподвижного тела – возникает cила трения покоя:
 .
.
Сила трения не зависит от площади соприкосновения поверхностей, а определяется коэффициентом трения поверхностей и модулем силы реакции опоры.
Сила упругости – это сила, возникающая при упругой деформации тела и направленная в сторону, противоположную смещению частиц тела в процессе деформации. Сила упругости:
1) действует между соседними слоями деформированного тела и приложена к каждому слою;
2) действует со стороны деформированного тела на соприкасающееся с ним тело, вызывающее деформацию, и приложена в месте контакта данных тел перпендикулярно их поверхностям (типичный пример — сила реакции опоры).
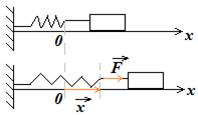
Закон Гука. Модуль силы упругости прямо пропорционален величине деформации. В частности, для пружины, сжатой или растянутой на величину x, сила упругости даётся формулой:
F = kx,
где k — коэффициент жёсткости пружины (жёсткость).
Коэффициент жёсткости k зависит не только от материала пружины, но также от её формы и размеров.
Закон Гука в векторной форме:
 .
.
Знак  показывает, что сила упругости направлена в противоположную сторону деформации.
показывает, что сила упругости направлена в противоположную сторону деформации.
Закон Гука справедлив только при малых деформациях.
Динамометр – прибор для измерения силы. Использование динамометра основано на том факте, что сила упругости пружины в определённых пределах прямо пропорциональна её деформации. По длине растянутой пружины можно судить о значении приложенной силы.

При параллельном соединении пружин жесткость системы равна:  .
.
При последовательном соединении пружин жесткость системы равна:  .
.

Типовые задачи
1) Тело массой 100 г движется по шероховатой горизонтальной поверхности под действием силы F=2 Н, направленной под углом 300 к горизонтали. Определите ускорение тела. Коэффициент трения поверхности 
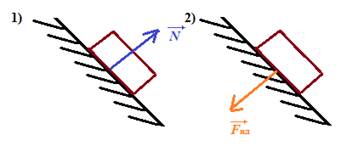
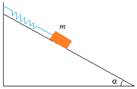
2) Тело массой m скользит без начальной скорости вниз по наклонной плоскости с углом наклона α. Определите ускорение тела в случае: а) трение о плоскость отсутствует; б) коэффициент трения тела о плоскость равен . При каком коэффициенте трения ещё возможно скольжение?
 3) Тело массой 1 кг лежит на горизонтальной поверхности. К нему в горизонтальном направлении прикладывают силу F. Коэффициент трения тела о плоскость равен 0,4. Определить ускорение тела и величину силы трения, если: а) F =5 Н; б) F =3 Н.
3) Тело массой 1 кг лежит на горизонтальной поверхности. К нему в горизонтальном направлении прикладывают силу F. Коэффициент трения тела о плоскость равен 0,4. Определить ускорение тела и величину силы трения, если: а) F =5 Н; б) F =3 Н.
4) Верёвка удерживает тело массой m на гладкой наклонной плоскости с углом наклона α. Определите силу натяжения нити.
 5) Пружина с жёсткостью
5) Пружина с жёсткостью  удерживает тело массой m на гладкой наклонной плоскости с углом наклона α. На какую величину растянута пружина?
удерживает тело массой m на гладкой наклонной плоскости с углом наклона α. На какую величину растянута пружина?
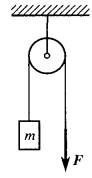 6) К одному концу верёвки, перекинутой через блок, подвешен груз массы m =10 кг. С какой силой F нужно тянуть вниз за другой конец верёвки, чтобы груз поднимался с ускорением a =1 м/с2 ?
6) К одному концу верёвки, перекинутой через блок, подвешен груз массы m =10 кг. С какой силой F нужно тянуть вниз за другой конец верёвки, чтобы груз поднимался с ускорением a =1 м/с2 ?
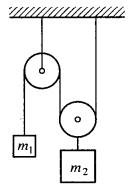 7) Найти силу натяжения нити в устройстве, изображённом на рисунке, если массы тел
7) Найти силу натяжения нити в устройстве, изображённом на рисунке, если массы тел  и
и  .
.
8) В покоящемся лифте лежит брусок массой m. Каким будет вес бруска при движении лифта:
а) вверх со скоростью v, вниз со скоростью v;
б) вверх ускоренно с ускорением a<g;
в) вниз ускоренно с ускорением a<g;
г) вверх замедленно с ускорением a<g;
д) вниз замедленно с ускорением a<g?
Закон всемирного тяготения.
Закон всемирного тяготения был открыт Исааком Ньютоном. Ньютон был первым, кто сначала догадался, а потом и строго доказал, что причина, вызывающая падение камня на Землю, движение Луны вокруг Земли и планет вокруг Солнца, одна и та же. Это сила тяготения, действующая между любыми телами Вселенной. Вот ход его рассуждений: ”Брошенный горизонтально камень отклонится под действием тяжести от прямолинейного пути и, описав кривую траекторию, упадёт наконец на Землю. Если его бросить с большей скоростью, то он упадёт дальше”. Продолжая эти рассуждения, Ньютон приходит к выводу, что если бы не сопротивление воздуха, то траектория камня, брошенного с высокой горы с определённой скоростью, могла бы стать такой, что он вообще никогда не достиг бы поверхности Земли, а двигался вокруг неё подобно тому, как планеты описывают в небесном пространстве свои орбиты.

Итак, по мнению Ньютона, движение Луны вокруг Земли или планет вокруг Солнца – это тоже свободное падение, но только падение, которое длится, не прекращаясь, миллиарды лет. Причиной такого “падения” является сила всемирного тяготения.

Сила взаимного притяжения двух тел прямо пропорциональна произведению масс этих тел и обратно пропорциональна квадрату расстояния между ними. Коэффициент пропорциональности G называется гравитационной постоянной.
Гравитационная постоянная была измерена в опыте Кавендиша с крутильными весами.
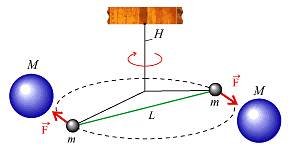
Рисунок. Опыт Кавендиша
О силе притяжения: сила, с которой первое тело массой m1 притягивает второе тело массой m2 равна по модулю и противоположна по направлению силе, с которой второе тело притягивает первое тело. Этот вывод следует из 3-го закона Ньютона: сила действия равна силе противодействия.
 ,
,  .
.

Закон всемирного тяготения справедлив только для материальных точек. При этом силы гравитационного взаимодействия направлены вдоль линии, соединяющей эти точки. Обобщая закон всемирного тяготения на тела любой формы, следует сказать, что сила притяжения приложена к центру тяжести тела (к центру шара в случае тела шарообразной формы тела). Тогда расстоянием R между телами считается расстояние между их центрами тяжести.
Типовые задачи
1. Вращение тела в вертикальной плоскости на нити длины l.
Такое движение тела не является равномерным движением по окружности.

Второй закон Ньютона:  ;
;
В проекции на ось x (радиальное направление): 
Здесь v – мгновенная скорость тела в момент, когда нить составляет с вертикалью угол α.
2. Равномерное вращение тела в горизонтальной плоскости на нити длины l.

Второй закон Ньютона: ;
В проекции на ось x (радиальное направление): 
В проекции на ось y:  . Отметим, что вдоль оси y ускорения нет.
. Отметим, что вдоль оси y ускорения нет.
3. Тело без трения скользит по поверхности сферы радиуса R.

Второй закон Ньютона:  .
.
В проекции на ось x (радиальное направление): 
4. Тело скользит по внутренней поверхности сферы радиуса R.

Второй закон Ньютона:  .
.
В проекции на ось x (радиальное направление): 
В проекции на ось y:  =0.
=0.
 .
.
5. Движение спутника по круговой орбите вокруг Земли.
В этом случае сила тяготения  Земли сообщает спутнику центростремительное ускорение
Земли сообщает спутнику центростремительное ускорение  :
:  .
.
В проекции на ось x:  . R – расстояние между центрами Земли и спутника (радиус орбиты спутника).
. R – расстояние между центрами Земли и спутника (радиус орбиты спутника).

6. Движение велосипедиста по треку.
При движении велосипедиста по гладкому треку, чтобы двигаться по окружности, велосипедист должен наклониться внутрь траектории, чтобы проекция силы тяжести создала центростремительное ускорение.
Сила реакции опоры проходит через центр тяжести велосипедиста под углом α к треку.

Запишем второй закон Ньютона:  .
.
В проекции на ось x: 
В проекции на ось y:  ;
;  .
.
Тангенс угла наклона к треку можно определить по формуле:  .
.
7. Тело вращается вместе с горизонтальной платформой.
Пусть тело массой m лежит на горизонтальной платформе, которая вращается с угловой скоростью w. Коэффициент трения тела о платформу равен µ. Расстояние от тела до оси вращения равно R. Тело будет удерживаться на платформе силой трения  . Именно сила трения . создаёт цетростремительное ускорение и совпадает с ним по направлению.
. Именно сила трения . создаёт цетростремительное ускорение и совпадает с ним по направлению.

Запишем второй закон Ньютона:  .
.
В проекции на ось x: 
В проекции на ось y:  ;
;  .
.
Сила трения: 
Статика твёрдого тела.
Основные понятия: момент силы, плечо силы, условие равновесия тел, центр масс, рычаг, золотое правило механики.
Плечо силы - это расстояние от оси вращения до линия действия силы.
AB=h – плечо силы относительно точки O (центр вращения).

Момент силы относительно оси вращения:
 .
.
Момент силы – векторная величина. Направление момента силы определяется по правилу буравчика.
Условия равновесия твёрдого тела:
1) 
2) 
В задачах ЕГЭ нет необходимости определения направления вектора момента силы, достаточно лишь указать, в какую сторону вращает или вращало бы тело данная сила, и присвоить моменту знак “+” или “-” в зависимости от направления вращения, этот знак следует учесть во втором условии равновесия твёрдого тела.
Центр масс тела – точка тела, которая движется так, как будто на неё действуют только внешние силы, её положение зависит от того, как распределена масса внутри тела.

На рисунке палка, брошенная под углом к горизонту, имеет точку, которая движется как материальная точка только под действием силы тяжести. Эта точка и есть центр масс палки.
Положение центра масс системы тел, определяется по формуле:

Если система состоит из 2 материальных точек массами  и
и  , то центр масс такой системы будет расположен где-то на отрезке, соединяющем эти точки, причём ближе к той точке, которая имеет большую массу. В качестве системы координат здесь достаточно выбрать одну ось x, направленную вдоль линии, соединяющей 2 точки. Для упрощения нахождения координаты цетра масс начало координат помещается в одну из материальных точек, что приводит к уменьшению количества слогаемых в формуле.
, то центр масс такой системы будет расположен где-то на отрезке, соединяющем эти точки, причём ближе к той точке, которая имеет большую массу. В качестве системы координат здесь достаточно выбрать одну ось x, направленную вдоль линии, соединяющей 2 точки. Для упрощения нахождения координаты цетра масс начало координат помещается в одну из материальных точек, что приводит к уменьшению количества слогаемых в формуле.


Центр масс твёрдого тела произвольной формы можно найти аналогичным образом, разбив его на элементарные тела, представимые в виде материальных точек.

Рычаг - твёрдое тело, которое может вращаться вокруг неподвижной оси.

Условие равновесия рычага:  ;
;  .
.
Рычаг даёт выигрыш в силе или в расстоянии.
Золотое правило механики: ни один из простых механизмов не даёт выигрыша в работе. Во сколько раз выигрываем в силе, во столько же раз проигрываем в расстоянии, и наоборот.
Статика жидкости и газов.
Основные понятия: давление, гидростатическое давление, атмосферное давление, барометр, закон Паскаля, гидростатический парадокс, сообщающиеся сосуды, гидравлический пресс, закон Архимела, выталкивающая сила.
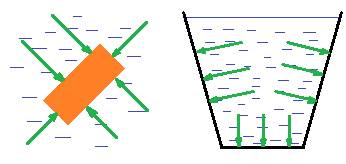
Силы, с которыми действуют друг на друга отдельные участки сжатой жидкости или газа, подобны силам упругости в твёрдых телах. Однако силы упругости в жидкости или газе возникают только при деформации сжатия, но не при сдвиге слоёв друг относительно друга. Сила, действующая на поверхность элемента жидкости со стороны остальной жидкости, а также на поверхность твёрдового тела, погружённого в жидкость, или стенки сосуда, в статическом случае всегда перпендикулярна к поверхности.
Упругие напряжения в жидкостях и газах называют давлением.
Если сила давления F равномерно распределена по поверхности площадью S, то давление p определяется:

Давление – скалярная величина.
Давление, которое создаёт жидкость, находящаяся в равновесии при действии силы тяжести, называют гидростатическим. Гидростатическое давление прямо пропорционально высоте столба жидкости:

h – глубина погружения в жидкость.
Давление внутри жидкости на любой глубине:

 – нормальное атмосферное давление,
– нормальное атмосферное давление, 
Для измерения атмосферного давления используются ртутные барометры.
При нормальном атмосферном давлении столбик ртути поднимается на высоту 760 мм:

Для перевода давления из мм. рт. ст. в Па используется следующее соотношение:
Первым ртутным барометром стала трубка Торричелли.

Закон Паскаля: давление, производимое внешними силами на покоящуюся жидкость, передаётся жидкостью во все стороны одинакого.
Давление в неподвижной жидкости (или газе) на одной и той же глубине не зависит от ориентации площадки внутри жидкости.
Гидростатический парадокс: благодаря различной форме сосуда сила давления жидкости на его дно может быть больше или меньше веса жидкости.

В сообщающихся сосудах однородная жидкость устанавливается на одном уровне. Этот факт следует из того, что давление на любом уровне в обоих сосудах одинакого.

В сообщающихся сосудах высоты столбов жидкости над уровнем раздела жидкостей обратно пропорциональны плотности этих жидкостей:


Энергия. Виды энергии.
Кинетическая энергия тела:  ,
, 
Потенциальная энергия тела, поднятого на высоту h:  ,
, 
Последняя формула в общем случае является приближённой и справедлива в случае, когда тело находится на небольшой высоте h над поверхностью Земли (то есть  , где ускорение свободного падения g можно считать постоянной величиной.
, где ускорение свободного падения g можно считать постоянной величиной.
Потенциальная энергия деформированной пружины:  ,
,
здесь k – жёсткость пружины, x – деформация пружины.
Полная механическая энергия: 
Теорема об изменении кинетической энергии: изменение кинетической энергии тела за некоторый промежуток времени равно работе, совершённой за это время силой, действующей на тело.

Теорема об изменении потенциальной энергии: работа силы тяжести (силы упругости) равна изменению потенциальной энергии тела (пружины), взятому с противоположным знаком.

Когда сила тяжести (сила упругости) совершает отрицательную работу, то потенциальная энергия тела (пружины) увеличивается, и наоборот.
Работа силы тяжести (силы упругости) не зависит от формы траектории и определяется только начальным и конечным положением тела.
Как видно, все те же утверждения можно применить к работе силы упругости и потенциальной энергии деформированной пружины.
Работа определяет лишь изменение потенциальной энергии. Можно произвольно выбирать состояние системы, в котором её потенциальная энергия считается равной нулю. Это состояние называется нулевым уровнем потенциальной энергии.
Потенциальная энергия взаимодействия тела и Земли (гравитационное взаимодействие):

G – гравитационная постоянная.
Согласно последней формуле за нулевой уровень потенциальной энергии принимается энергия в состоянии, когда тело бесконечно удалено от Земли. В таком случае нулевому уровню будет соответствовать не минимальная, а максимальная энергия. При любом конечном значении r потенциальная энергия взаимодействия тела и Земли отрицательна.
Потенциальная энергия существует благодаря наличию гравитационных сил притяжения. Эти силы являются консервативными. В отсутствии этих сил тела не обладают потенциальной энергией.
Консервативные силы – силы, работа которых не зависит от формы траектории, а определяется лишь начальным и конечным положениями тела.
Примеры: сила тяжести, сила тяготения, сила упругости, сила Кулона.
Неконсервативные силы (диссипативные) – силы, зависящие от относительной скорости движения тел.
Примеры: сила трения, сила сопротивления движению.
Таким образом, теорему об изменении потенциальной энергии можно обобщить на все консервативные силы: работа консервативных сил равна изменению потенциальной энергии, взятому с противоположным знаком.
Механические колебания
Основные понятия: гармонические колебания, амплитуда, частота, период, фаза колебаний; график гармонических колебаний; уравнение гармонических колебаний; связь координаты, скорости и ускорения; математический маятник, пружинный маятник; свободные и вынужденные колебания, резонанс.
Гармонические колебания.
Гармонические колебания – колебания, происходящие по закону синуса или косинуса.
Зависимость координаты от времени при гармонических колебаниях:

 – амплитуда колебаний;
– амплитуда колебаний;
w – циклическая частота колебаний, [w]=1/с;
 – фаза колебаний;
– фаза колебаний;
 – начальная фаза колебаний.
– начальная фаза колебаний.
Частота колебаний: 
Циклическая частота колебаний: 
Период колебаний: 
Зависимость скорости от времени при гармонических колебаниях:


Зависимость ускорения от времени при гармонических колебаниях:


Уравнение гармонических колебаний:

Решением такого дфифференциального уравнения является функция вида:


При свободных незатухающих колебаниях выполняется закон сохранения механической энергии:

Максимальная кинетическая энергия:

Максимальная потенциальная энергия:

2. Математический маятник - это небольшое тело, подвешенное на невесомой нерастяжимой нити.

Циклическая частота колебаний математического маятника:

Период колебаний математического маятника:

Закон сохранения механической энергии:


3. Пружинный маятник - это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.

|
|
|








