 Такая система возбуждения более мощная,
Такая система возбуждения более мощная,  и
и 
Особенностью этой серии является низкое напряжение U=6, 12, 27 В.
[n]=9000 об/мин.
 3. Серия ДПУ – двигатели с дисковым якорем.
3. Серия ДПУ – двигатели с дисковым якорем.
 Обмотка вытравлена на диске ротора.
Обмотка вытравлена на диске ротора.
Такая серия обеспечивает самый высокий l за счет лучших условий охлаждения.
 и
и 
Мном=0,57…3,5 Нм.
 Двигатель компактен, используется для небольших механизмов, обеспечивает быстрый разгон и торможение при небольшой нагрузке.
Двигатель компактен, используется для небольших механизмов, обеспечивает быстрый разгон и торможение при небольшой нагрузке.
2) Высокомоментные двигатели.
Серии ПБС и ПБСТ.
Встроенный ТГ выполняет роль датчика скорости.
 - уравнение датчика скорости.
- уравнение датчика скорости.
Датчик скорости может обозначаться, как BR.

Для таких двигателей обязательно наличие делителя R1R2.
Щеточный контакт.



Зона нечувствительности тем меньше, чем больше нагружен ТГ.


Для металлургического привода датчик скорости центрируют:
D»0,1 мм, при R=30 мм.
dw»1% - погрешность скорости.
Кинематическая схема такого сопряжения:
 R1=const
R1=const
R2=var
При повороте из-за переменного R1 оказывается, что wДС=var, при wдв=const.

Dw - погрешность измерения от номинального значения. Для систем управления это много, так как зачастую требуется [Dw ]доп=(0,03…0,05)wном по ГОСТ.
Чтобы уменьшить погрешность необходима соосность, для этого подшипниковые гнезда двигателя и датчика скорости изготовляют за одну установку на станке.
 Высокомоментные двигатели серии ПБСТ характеризуются возбуждением от постоянных магнитов Þ эти двигатели нельзя разбирать, иначе существенно ослабляется намагничиваемость. Также эти двигатели боятся ударов, так как постоянные магниты вклеены внутрь корпуса и могут отваливаться.
Высокомоментные двигатели серии ПБСТ характеризуются возбуждением от постоянных магнитов Þ эти двигатели нельзя разбирать, иначе существенно ослабляется намагничиваемость. Также эти двигатели боятся ударов, так как постоянные магниты вклеены внутрь корпуса и могут отваливаться.
 и
и 
В справочниках мощность такого двигателя не указывается, указан лишь максимальный момент, так как привод предназначен для работы на низких скоростях, при которых мощность ничтожна, а момент велик. Mmax=70…350 Нм.
ПБСТ рассчитан на максимально длительную работу с максимальным моментом.
Но такой двигатель имеет очень большой размер.
Альтернативные структуры электроприводов
Вентильные двигатели
 Вентильные двигатели – электрические машины, функционально объединенные с управляемым полупроводниковым коммутатором. Они близки по конструктивным признакам и характеристикам к коллекторным двигателям. Вентильные двигатели имеют частоту вращения вала, не зависящую от частоты сети, регулирование частоты вращения осуществляется путем изменения потока возбуждения и тока в якоре. Вентильные двигатели обладают высоким пусковым моментом и хорошими энергетическими показателями. Благодаря отсутствию коллекторно-щеточного узла вентильные двигатели имеют большую надежность и долговечность.
Вентильные двигатели – электрические машины, функционально объединенные с управляемым полупроводниковым коммутатором. Они близки по конструктивным признакам и характеристикам к коллекторным двигателям. Вентильные двигатели имеют частоту вращения вала, не зависящую от частоты сети, регулирование частоты вращения осуществляется путем изменения потока возбуждения и тока в якоре. Вентильные двигатели обладают высоким пусковым моментом и хорошими энергетическими показателями. Благодаря отсутствию коллекторно-щеточного узла вентильные двигатели имеют большую надежность и долговечность.
 Вентильные двигатели, как и коллекторные, имеют широкое разнообразие конструкций и схем включения обмоток.
Вентильные двигатели, как и коллекторные, имеют широкое разнообразие конструкций и схем включения обмоток.
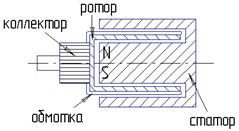
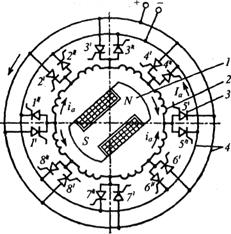
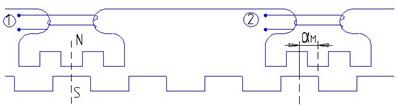
На рис. 1 представлена схема вентильного двигателя, который имеет такую же обмотку якоря, как и машина постоянного тока. На роторе вентильного двигателя 1 расположена обмотка возбуждения или постоянные магниты. В пазах статора располагается многофазная обмотка якоря 2, секции или группа секций которой присоединены через полупроводниковые блоки 3 к распределительным шинам 4 и сети.
В положении, показанном на рис. 1, открыты тиристоры 1' и 5". Ток якоря Iя в обмотке статора проходит по двум параллельным ветвям и создается вращающий момент. При движении ротора происходит переключение тиристоров датчиками положения ротора.
При повороте ротора по часовой стрелке на угол 360/m, где m — число отпаек (фаз) обмотки якоря (в рассматриваемой машине m = 8) происходит переключение тиристоров. Включаются тиристоры 2' и 6", а 1' и 5" — отключаются и т.д.
Таким образом, при вращении ротора вращается и поле якоря. При этом происходит электромеханическое преобразование энергии.
При реверсе работают пары тиристоров: 1" и 5', 2" и 6' и т.д. Включение и отключение тиристоров осуществляется путем подачи импульсов напряжения со специальных датчиков, реагирующих на положение ротора.
 + U - Коммутатор по схеме рис. 1 получается громоздким и вентильные двигатели по этой схеме практически не применяются. Чтобы упростить коммутатор, надо уменьшить число фаз машины.
+ U - Коммутатор по схеме рис. 1 получается громоздким и вентильные двигатели по этой схеме практически не применяются. Чтобы упростить коммутатор, надо уменьшить число фаз машины.
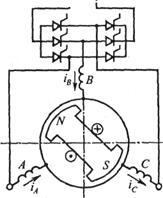
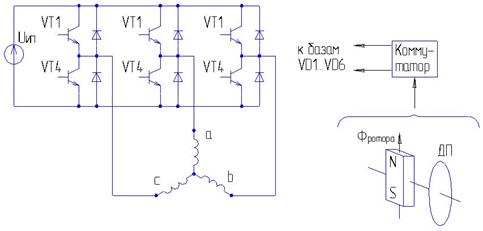
Простейшей схемой вентильного двигателя является двухфазная схема, но наибольшее применение нашла трехфазная схема (рис. 2). В этой схеме вентильная коммутация осуществляется трехфазным инвертором.
Система вентильной коммутации обычно состоит из датчика синхронизирующих сигналов, системы формирования сигналов управления и управляемого коммутатора.
 Датчик синхронизирующих сигналов задает порядок и частоту переключения элементов коммутатора. При позиционном управлении — это датчик положения ротора, а при фазовом — датчик фазы напряжения якорной обмотки. Датчик положения ротора представляет собой встроенный в машину узел, состоящий из чувствительных элементов, закрепленных на статоре, и сигнальных элементов, закрепленных на роторе. Обычно используются фотоэлектрические или магнитомодуляционные датчики.
Датчик синхронизирующих сигналов задает порядок и частоту переключения элементов коммутатора. При позиционном управлении — это датчик положения ротора, а при фазовом — датчик фазы напряжения якорной обмотки. Датчик положения ротора представляет собой встроенный в машину узел, состоящий из чувствительных элементов, закрепленных на статоре, и сигнальных элементов, закрепленных на роторе. Обычно используются фотоэлектрические или магнитомодуляционные датчики.
Система формирования сигналов управления обеспечивает усиление и формирование синхронизирующих сигналов.
Управляемый коммутатор осуществляет бесконтактные переключения в силовых цепях вентильного двигателя. Управляемый коммутатор выполняется на полупроводниковых приборах или других переключающих элементах, например герконах.
В управляемых коммутаторах на полупроводниковых приборах используются полностью управляемые приборы (транзисторы, двухоперационные тиристоры) и не полностью управляемые (тиристоры, семисторы).
По способу коммутации управляемые коммутаторы на не полностью управляемых полупроводниковых приборах можно разделить на три вида: с естественной, принудительной и смешанной коммутацией. При естественной коммутации переключения происходят под действием ЭДС якорной обмотки. При принудительной коммутации управление тиристорами осуществляется под действием коммутирующего напряжения отдельного источника либо напряжения питающей сети. При смешанной коммутации имеет место комбинация первого и второго способов.
Вентильные двигатели могут питаться от сети как постоянного, так и переменного тока. Если управляемый коммутатор питается от сети постоянного тока, то он представляет собой инвертор — преобразователь постоянного тока в переменный. Если управляемый коммутатор подключен к сети переменного тока, то он выполняет функции преобразователя частоты.
Электромеханическая часть вентильных двигателей постоянного тока, как правило, аналогична известным конструктивным модификациям синхронных машин. Для маломощных приводов используются двигатели с постоянными магнитами, а также гистерезисные, реактивные и индукторные двигатели. В приводах средней и большой мощности используются двигатели с электромагнитным возбуждением.
Характерной особенностью вентильных двигателей, отличающей их от двигателей постоянного тока, является наличие дополнительного канала управления по углу синхронизации инвертора. Этот канал используется для обеспечения необходимой жесткости механической характеристики и достижения большей перегрузочной способности.
Вентильные двигатели применяются и в приводах небольшой мощности, где нежелательно применение механического коммутатора (проигрыватели, приборы магнитной записи и др.).
 Вентильные двигатели большой мощности нашли применение там, где ранее использовались нерегулируемые асинхронные или синхронные двигатели. Выполнены вентильные двигатели мощностью 1600 кВт с регулированием частоты вращения для привода компрессоров холодильных машин и насосов циркуляционных систем.
Вентильные двигатели большой мощности нашли применение там, где ранее использовались нерегулируемые асинхронные или синхронные двигатели. Выполнены вентильные двигатели мощностью 1600 кВт с регулированием частоты вращения для привода компрессоров холодильных машин и насосов циркуляционных систем.
Ротором выступает постоянный магнит.
Обозначение диодов VD1…VD6.
ДП – датчик положения.
Коммутатор всегда включает VT1…VT6 так, чтобы магнитный поток статора был перпендикулярен магнитному потоку ротора, подобно тому, как это делается в ДПТ с помощью механического коммутатора.

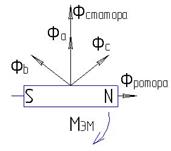
При включенных VT2, VT3, VT4 диаграмма потоков такая:
 При Uип=0 двигатель не будет развивать момента, по мере увеличения напряжения будут увеличиваться и токи.
При Uип=0 двигатель не будет развивать момента, по мере увеличения напряжения будут увеличиваться и токи.
Механические характеристики такого двигателя такие же, как и у ДПТ.
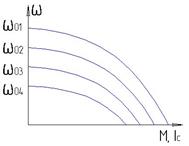 w01>w02>w03>w04
w01>w02>w03>w04
Uип1>Uип2>Uип3>Uип4
Шаговые двигатели
Шаговые, или импульсные двигатели питаются импульсами электрической энергии, а ротор в зависимости от полярности импульсов перемещается по часовой стрелке или против часовой стрелки на определенный угол-шаг. Шаговые двигатели обычно маломощные индикаторные. Основная задача их отрабатывать электрические импульсы, преобразуя электрические сигналы в угловые перемещения.
Для управления шаговыми двигателями используются коммутаторы на полупроводниковых элементах, формирующие импульсы, которые подаются на фазы обмотки шагового двигателя. Число фаз выбирается равным четырем или шести. Шаг двигателя может быть от 180 до 1°. В специальных установках шаг может быть несколько минут.
Шаговые двигатели могут быть выполнены на основе конструкции любых синхронных двигателей. Так как основным требованием к шаговым двигателям является точность отработки сигналов и высокая частота импульсов, предпочтительны конструкции шагового двигателя, выполненного на базе реактивных и индукторных синхронных машин.
Шаговые двигатели характеризуются предельной частотой импульсов, которые двигатель обрабатывает без пропуска шага. Пусковые свойства шаговых двигателей характеризуются частотой приемистости — максимальной частотой импульсов, при которой возможен пуск без потери шагов. В зависимости от типа шагового двигателя и нагрузки частота приемистости колеблется от 10 до 104 Гц.
Математическое описание процессов преобразования энергии при импульсном питании осуществляется по уравнениям электромеханического преобразования энергии и их видоизменениям, когда форма напряжения — импульсная.
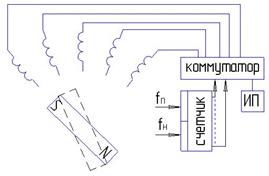 Счетчик подсчитывает количество fп – прямых и fн – обратных "шагов".
Счетчик подсчитывает количество fп – прямых и fн – обратных "шагов".
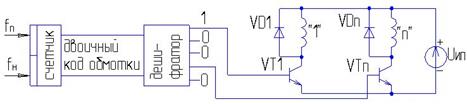
Одновременно включена только одна обмотка.

p – число пар полюсов;
m – фазность двигателя.
Характеристики двигателя:
 1. aМ – цена импульса; определяет угловой шаг, совершаемый двигателем при единичном переключении (угол поворота за шаг).
1. aМ – цена импульса; определяет угловой шаг, совершаемый двигателем при единичном переключении (угол поворота за шаг).
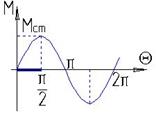
2. Угловая характеристика двигателя
Для активного ротора:
угол Q снят для однополюсной однофазной машины.
 Q=90° - нулевой момент; при Q>90° момент меняет знак.
Q=90° - нулевой момент; при Q>90° момент меняет знак.
Двигатель выполняет свои функции только в этом диапазоне изменения углов.
Мст – максимальный момент удержания.
При большой внешней нагрузке возможна потеря шага.
3. Частота приемистости – максимальная частота, до которой разгоняется двигатель при скачкообразном приложении импульсов из состояния покоя. Разгон при этом происходит за период одного импульса (подразумевается пуск на холостом ходу, то есть без нагрузки и присоединенных маховых масс). Если подавать импульсы часто, то наступит такая частота, которую двигатель не обработает.
4. Предельная динамическая характеристика – характеристика, связывающая частоту приемистости и момент инерции присоединенного к двигателю механизма.
Характеристика входит в документацию.
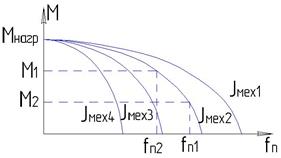 М2>М1 Þ fп2<fп1
М2>М1 Þ fп2<fп1

Число шагов двигателя на оборот.
Для двигателя с активным ротором:
Число шагов зависит от способа управления:
симметричный (поочередное включение каждой обмотки) и несимметричный (одновременно может включаться несколько обмоток)
С помощью несимметричного способа управления можно получить дополнительные положения ротора.
Например, достигнуть углового шага a/2.
однополярный и разнополярное (удвоение числа возможных положений)
При однополярном симметричном управлении число положений n=pm, где р – число пар полюсов; m – число фаз двигателя.
р = число параллельных ветвей в любой фазе.
При однополярном несимметричном управлении n=2pm
При разнополярном несимметричном управлении n=4pm
Для двигателя с пассивным (перемагничиваемым) ротором:
 zротора=zстатора-1
zротора=zстатора-1
Пусть ток подан в обмотку j Þ на роторе появляется магнитное поле, которое противоположно магнитному полю статора, и полюса притягиваются. При этом минимизируется энергия электромагнитного поля за счет поворота ротора. Она минимальна, когда картина магнитных силовых линий слева и справа от оси симметрична, что соответствует совпадению осей зубцов.
Выключим ток в обмотке j и включим в обмотке k. Число зубцов меньше Þ картина силовых линий несимметрична Þ появляется усилие, смещающее ротор до центра симметрии, двигатель шагает на  , где zр – число зубцов ротора Þ число положений, которые может принять ротор
, где zр – число зубцов ротора Þ число положений, которые может принять ротор  .
.
Такой двигатель удобен для глубокого редуцирования ротора (получения большого числа шагов).
Низковольтные двигатели: серии ДШ, ДША, ДШБ отличаются числом пар полюсов.

Более подробно о двигателях можно узнать из следующей литературы:
Копылов, Клоков. Справочник, 1988 г.
Кенио. Управление ШД.
Волков, Миловзоров. Выбор ШД (брошюра), 1978 г.
Методика выбора ШД
 Кинематическая схема ШД.
Кинематическая схема ШД.
Представляет собой корпус суппота.
Исходные данные:
i – передаточное число редуктора;
L – дискретность перемещения (цена шага, точность позиции) [м/имп];
tхв – шаг ходового винта [м/об];
vmax – максимальная скорость инструмента [м/мин];
Мс – момент сопротивления (включая трение холостого хода и сопротивление, вызываемое силами резания) [Нм];
Jпр – момент инерции.
Выбор ШД:
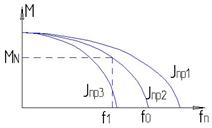
1. определение частоты приемистости


Если система регулирования реализует линейное изменение частоты (плавный разгон), то fп выбирается по f0, то есть  ,
, 
2. определение углового шага

На этом шаге может наоборот выбираться  ,
,  - передаточное число
- передаточное число
3. определение момента двигателя М
 , где Мс – момент сопротивления на ходовом винте
, где Мс – момент сопротивления на ходовом винте

 Мст – момент синхронизации
Мст – момент синхронизации 
Рекомендуется 
4. проверка двигателя по динамическим режимам
f0 – разгон на холостом ходу.
f1 – разгон под нагрузкой (рабочие подачи).
Выбор двигателя







