ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РФ
ГОУ ВПО «Уральский государственный технический
университет – УПИ»
Конспект лекций по курсу
«Электромеханические системы»
Выполнила
студентка гр.М – 416 Гайченя О.Д.
Преподаватель Бородин М.Ю.
Введение.. 3
1. Основы электропривода.. 4
1.1. Структурная схема автоматизированного электропривода. 4
1.2. Функциональная схема автоматизированного электропривода. 5
1.3. Модель механической части электропривода. 6
1.4. Понятие механической характеристики двигателя и механизма. 7
1.5. Установившиеся и переходные режимы электропривода. Устойчивость электропривода. 10
1.6. Энергетика электромеханического преобразователя (двигателя) 11
1.7. Понятие номинальных режимов и ограничения электромеханических преобразований. 13
1.8. Приведение статических и динамических нагрузок к валу двигателя. 14
2. Электромеханические свойства двигателя.. 16
2.1. Электромеханические свойства двигателя постоянного тока независимого возбуждения (ДПТ НВ) 16
2.2. Энергетика ДПТ НВ. 19
2.3. Искусственные характеристики ДПТ НВ.. 19
2.3.1. Искусственные характеристики путем изменения напряжения якоря. 20
2.3.2. Искусственные характеристики при регулировании сопротивления якоря. 21
2.3.3. Управление возбуждением.. 22
2.4. Способы управления напряжением якоря ДПТ НВ. Источники питания. 24
2.5. Механические характеристики ДПТ ПВ. 28
2.6. Статические характеристики АД.. 30
2.7. Способы регулирования АД. Искусственные характеристики АД. 32
2.7.1. Частотный способ регулирования. 34
2.7.2. Фазовый способ регулирования. 37
2.7.3. Регулирование изменением сопротивления обмоток. 38
2.7.4. Регулирование изменением числа пар полюсов. 39
2.8. Реализация тормозных режимов ДПТ. 40
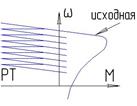
2.8.1. Рекуперативное торможение (РТ) 40
2.8.2. Динамическое торможение (ДТ) 42
2.8.3. Торможение противовключением (ТПВ) 42
2.9. Тормозные режимы АД. 43
2.9.1. Рекуперативное торможение (РТ) 43
2.9.2. Динамическое торможение (ДТ) 44
2.9.3. Торможение противовключением (ТПВ) 45
3. Специальные конструкции двигателей. 47
3.1. Специальные конструкции двигателей. 47
3.2. Альтернативные структуры электроприводов. 49
3.2.1. Вентильные двигатели. 49
3.2.2. Шаговые двигатели. 51
3.3. Методика выбора ШД.. 54
4. Выбор двигателя.. 56
4.1. Математическая модель процессов нагревания и охлаждения. 56
4.2. Классификация режимов электроприводов по виду теплового процесса. 58
4.3. Выбор мощности двигателя. 61
4.3.1. Метод средних потерь. 61
4.3.2. Метод эквивалентного тока. 63
4.3.3. Методы эквивалентного момента и мощности. 64
Электромеханические системы
Список литературы:
1. Чиликин, Сандлер. Общий курс электропривода, 1981 г.
2. Михайлов. Автоматизированный электропривод станков и промышленных роботов, 1990 г.
3. Справочник по автоматизированному электроприводу. Группа профессоров МЭИ, 1983 г.
4. Поздняков. Электропривод промышленных роботов, 1990 г.
5. Кенио Т Шаговые двигатели и их микропроцессорные системы управления: Пер. с англ. – М: Энергоатомиздат, 1987 г, 200с
Введение
Предмет курса: силовое электрическое оборудование металлорежущих станков и автоматизированных комплексов, включающее также системы и средства локального управления этими комплексами.
Электромеханика (мехатроника) направлена на получение предельных характеристик в плане быстродействия, точности, экономичности.
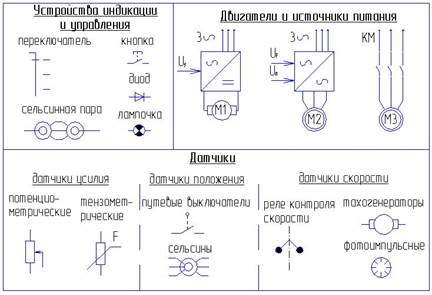 Состав электрооборудования станков и автоматизированных комплексов.
Состав электрооборудования станков и автоматизированных комплексов.
Двигатели:
Двигатель постоянного тока независимого возбуждения (ДПТ НВ);
Асинхронные двигатели короткозамкнутые (АДКЗ);
Асинхронные двигатели с фазным ротором (АДФР);
Синхронные двигатели (СД);
Шаговые двигатели (ШД);
Пьезоприводы.
Источники питания:
Управляемые выпрямители ≡ тиристорные преобразователи ≡ вентильные преобразователи;
Преобразователи частоты (fвых и Uвых – var);
Широтно-импульсные преобразователи (ШИП).
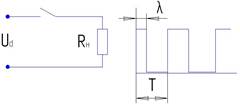 ШИП используют принцип широтно-импульсной модуляции:
ШИП используют принцип широтно-импульсной модуляции:
Ключ замыкается с постоянной частотой, но длительность включенного состояния в рамках периода может изменяться.
T=const, l=var.
При изменении λ меняется напряжение на нагрузке.
ШИП используется для любых видов двигателей.
Такой быстродействующий ключ смогли сделать только недавно; IGBT – биполярный транзистор с изолированным затвором. Включение/выключение с частотой 1…5 мкс Þ малы потери; существует возможность выключения.
Основы электропривода
Автоматизированным электроприводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую, является электрический двигатель, который чаще всего управляется при помощи соответствующих преобразовательных и управляющих устройств с целью формирования статических, и динамических характеристик электропривода, отвечающих требованиям производственного механизма.
Электромеханические свойства двигателя постоянного тока независимого возбуждения (ДПТ НВ)

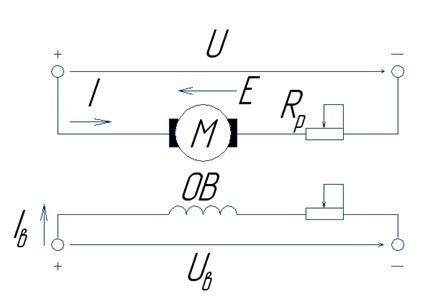 Обычная схема включения двигателя постоянного тока независимого возбуждения представлена на рис. 1. Якорь двигателя М и его обмотка возбуждения ОВ обычно получают питание от разных, независимых друг от друга источников (преобразователей) напряжения U и Uв, что позволяет отдельно регулировать напряжение на якоре двигателя и на обмотке возбуждения и выполнять их на разное номинальное напряжение. Лишь при наличии сети постоянного тока или при нерегулируемом преобразователе в якорной цепи обмотка возбуждения питается от того же источника напряжения, что и якорь двигателя. Но и в этом случае ток возбуждения Iв не зависит от тока I якоря двигателя.
Обычная схема включения двигателя постоянного тока независимого возбуждения представлена на рис. 1. Якорь двигателя М и его обмотка возбуждения ОВ обычно получают питание от разных, независимых друг от друга источников (преобразователей) напряжения U и Uв, что позволяет отдельно регулировать напряжение на якоре двигателя и на обмотке возбуждения и выполнять их на разное номинальное напряжение. Лишь при наличии сети постоянного тока или при нерегулируемом преобразователе в якорной цепи обмотка возбуждения питается от того же источника напряжения, что и якорь двигателя. Но и в этом случае ток возбуждения Iв не зависит от тока I якоря двигателя.
Направления тока I и ЭДС вращения двигателя Е, показанные на рис. 1, соответствуют двигательному режиму работы, когда электрическая энергия потребляется двигателем из сети (от источника напряжения U) и преобразуется в механическую энергию, мощность которой равна Р = Мω. Зависимость же между М и ω двигателя определяется его механической характеристикой.
Аналитическое выражение механической характеристики двигателя может быть получено из уравнения равновесия напряжений, составленного для якорной цепи схемы (рис. 1). При установившемся режиме работы двигателя приложенное напряжение U, В, уравновешивается падением напряжения в якорной цепи IR и наведенной в якоре ЭДС вращения Е, В, т. е.
U = IR + E, (1)
здесь I — ток в якорной цепи двигателя, A; R — суммарное сопротивление якорной цепи, Ом, включающее внешнее сопротивление резистора Rp и внутреннее сопротивление якоря двигателя Rя (при наличии дополнительных полюсов учитывается и их сопротивление);
E=cФω, (2)
где c — коэффициент, зависящий от конструктивных данных двигателя, c = pN/2na (p — число пар полюсов двигателя; N — число активных проводников. обмотки якоря; а — число пар параллельных ветвей обмотки якоря); Ф и ω — соответственно магнитный поток, Вб, и угловая скорость двигателя, рад/с.
Если в (1) вместо Е подставим ее значение Е из (2), то получим уравнение для скорости двигателя
 , (3)
, (3)
Уравнение (3) представляет собой зависимость скорости двигателя от тока якоря. Такую зависимость  называют электромеханической характеристикой двигателя.
называют электромеханической характеристикой двигателя.
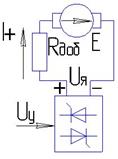
Электрическая схема замещения (с учетом противоЭДС)
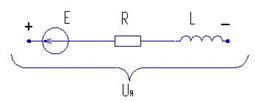
Р эл = UdIя > 0
R – активное сопротивление обмотки;
L – индуктивность якорной цепи.
Полная система уравнений, описывающих ДПТ НВ:
Уравнение движения привода: 
Для получения уравнения механической характеристики необходимо подставить (3) значение тока I, найденное из (4), получим выражение для механической характеристики:
 (5)
(5)
или
 (6)
(6)
где
k=сФ (7)
Коэффициент k принимается постоянным, не зависящим от нагрузки, если у двигателя с независимым возбуждением имеется компенсационная обмотка. Он может считаться неизменным, если для обычных двигателей пренебречь реакцией якоря.
Из (5) видно, что механическая характеристика двигателя ω=f(М) при неизменных параметрах U, Ф и R представляется прямой линией.
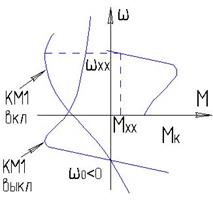
На рис. 2 представлены механические характеристики двигателя независимого возбуждения для различных сопротивлений якорной цепи. Как видно из (5), при М = 0 все характеристики проходят через одну точку, лежащую на оси ординат. Угловая скорость в этой точке имеет вполне определенное значение, не зависящее от сопротивления якорной цепи. Эта скорость носит название скорости идеального холостого хода и определяется выражением 
При скорости идеального холостого хода, когда ток в якорной цепи равен нулю, ЭДС якоря, направленная навстречу приложенному напряжению, равна ему по абсолютному значению. Если двигатель до приложения нагрузки работал с угловой скоростью ω0, то при появлении на его валу момента сопротивления угловая скорость будет снижаться. Следствием этого будет уменьшение ЭДС вращения Е согласно (2) и увеличение тока якоря в соответствии с (1) и момента двигателя по (4). Угловая скорость будет снижаться до тех пор, пока момент двигателя не сравняется с моментом сопротивления. Разность значений установившихся скоростей электропривода до и после приложения заданной статической нагрузки называется статическим падением (перепадом) скорости электропривода. Второй член (6) характеризует собой статическое падение угловой скорости (перепад) относительно угловой скорости идеального холостого хода:

Таким образом, уравнение для скорости двигателя может быть записано так:

Верхняя характеристика из семейства, приведенного на рис.2 называется естественной. Естественной характеристикой называется такая характеристика двигателя, которая получается при отсутствии внешних резисторов в якорной цепи и номинальных значениях напряжения и магнитного потока двигателя.
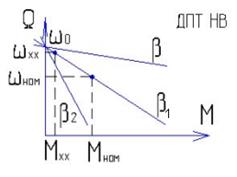
Мхх – момент холостого хода;
wхх – скорость холостого хода;
Мном – номинальный момент.
Мхх@0,05Мном.
 Естественная характеристика самая жесткая (соответствует b). При уменьшении b возрастает Dw, то есть характеристика менее жесткая (соответствует b1, b2).
Естественная характеристика самая жесткая (соответствует b). При уменьшении b возрастает Dw, то есть характеристика менее жесткая (соответствует b1, b2).
Мкз может формироваться лишь аварийно, при прямом пуске двигателя: 
 w=0 точка короткого замыкания. Мкз=(10…20)Мном. Такой режим не допустим даже кратковременно, Мк.з.>>λМном
w=0 точка короткого замыкания. Мкз=(10…20)Мном. Такой режим не допустим даже кратковременно, Мк.з.>>λМном
Физические ограничения Мдоп:
Длина дуги пропорциональна квадрату тока: ℓдуги»Iя2.
 При Мкз дуга перекрывает промежуток между щетками двигателя, что соответствует короткому замыканию (это называется перекрытием коллектора или круговым огнем по коллектору и, как следствие, двигатель выходит из строя).
При Мкз дуга перекрывает промежуток между щетками двигателя, что соответствует короткому замыканию (это называется перекрытием коллектора или круговым огнем по коллектору и, как следствие, двигатель выходит из строя).
Реальная перегрузочная способность ДПТ  .
.
l≤2…2,5 – превышение можно допускать лишь на очень короткий срок.
Но существуют специальные серии двигателей с полым якорем, с печатным якорем, которые допускают перегрузки до l=5…7.
Ламели изготовляются из меди.
2.2. 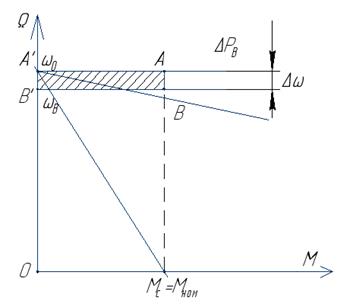 Энергетика ДПТ НВ.
Энергетика ДПТ НВ.
Потери в двигателе пропорциональны снижению скорости Δω под действием нагрузки Мс
Докажем это утверждение.
Пусть двигатель работает под нагрузкой Мс=Мном на механической характеристике А'В.
Рабочая точка В. Оценим потери в двигателе.
Отдаваемая механическая мощность (см. рис): 
Потребляемая из сети электромагнитная мощность:

Здесь использовано: 
Потери в двигателе 
В масштабе рисунка, механическая мощность равна площади прямоугольника В'ВСО:
 ,
,
а соответственно, потребляемая мощность и потери:

Площадь потерь заштрихована на рисунке.
Таким образом, потери ΔР тем больше, чем больше просадка скорости Δω=АВ под нагрузкой относительно скорости идеального холостого хода. Этими представлениями будем пользоваться для сопоставления энергетики различных способов регулирования скорости двигателя.
Самая плохая энергетика – точка С:
Рмех=wс∙Мном=0.
Вся потребляемая энергия переводится в тепло. Рэл=Uном∙I ном.
Чем мягче характеристика двигателя, тем больше в нем внутренние потери.
Управление возбуждением
Uя=const, Rя=Rест
Регулирование угловой скорости двигателя изменением тока возбуждения является одним из наиболее простых и экономичных способов. Мощность, потребляемая обмоткой возбуждения двигателя, составляет примерно 2—2,5 % мощности двигателя, поэтому этот способ находит широкое применение в современной практике электропривода.
Принципиальные схемы электропривода при регулировании тока возбуждения показаны на рис. а, б. Ток возбуждения регулируется или с помощью резистора (рис а) в случае двигателей малой мощности, или:посредством регулятора напряжения РП (рис. б).
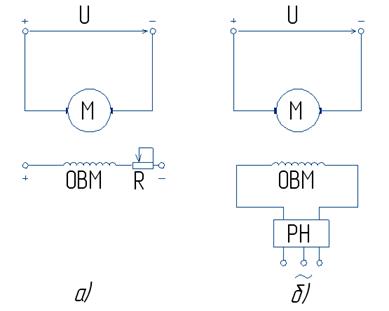
Проанализируем уравнение механической характеристики (5). От Ф зависит как скорость идеального холостого хода, так и жесткость характеристики β. Поток Ф может только уменьшаться.
Ф<Фном
Большой магнитный поток недостижим из-за перегрева.
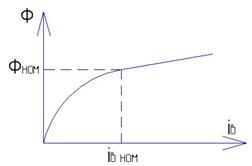
Ф3< Ф2< Ф1< Фном

Уменьшение Ф увеличивает ω0 и уменьшает скорость (увеличивает наклон характеристики)
Ослабление потока ниже допустимого предела может привести к тому, что двигатель пойдет вразнос.
В приводах предусматривается реле обрыва поля (РОП), которое отвечает за отключение установки при пропадании Iв.
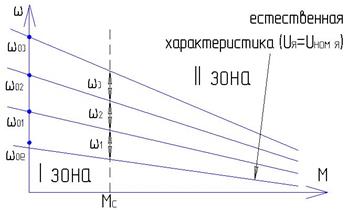
Все естественные характеристики группируются выше естественной. Поэтому эту зону принято называть II зоной, а привод с регулируемым возбуждением – двухзонным.
В обычных сериях двигателей можно ослаблять поток в 2-3 раза Þ угонная скорость wmax=(2…3)wном – ограничение по скорости.
Ослабляя поле, получаем скорости выше естественных характеристик. Эту зону регулирования принято называть второй зоной.
Системы с регулированием скорости возбуждением называются двухзонными. Это системы с постоянным потоком.
Регулирование во второй зоне сопровождается уменьшением допустимого момента.

Уменьшим поток в 2 раза: 
Кривая допустимых моментов:

Регулирование во второй зоне соответствует нагрузке типа постоянство мощности, а в первой – постоянство момента.
Таким образом регулирование возбуждения позволяет экономить мощность двигателя, если характер нагрузки – постоянство мощности.
Мостовая схема выпрямления.
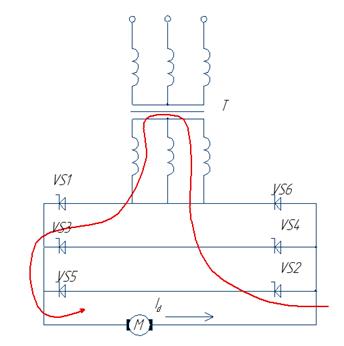
 Управление преобразователь – выпрямитель.
Управление преобразователь – выпрямитель.
VS1, VS2 - открыты
VS3, VS2 – следующий такт
VS3, VS4
VS5, VS4
VS5, VS6
VS1, VS6
6 состояний за период сети
6 – ти импульсная схема
Id всегда протекает по 2 –м обмоткам транзистора и по 2 – м тиристорам. Нагрузка подключается обеими концами к вентильной схеме.
Регулировочная характеристика:
 , р=6
, р=6
Реверсивные преобразователи
Для обеспечения реверса тока и момента двигателя используется 2 комплектные схемы преобразования.
Например: 2-х комплектная мостовая схема.
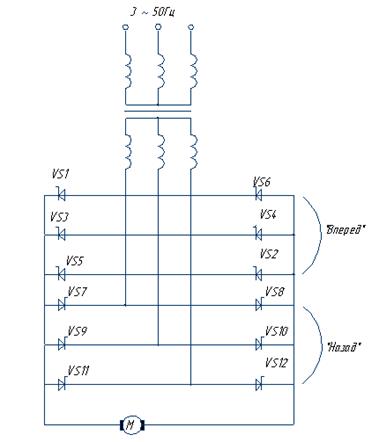
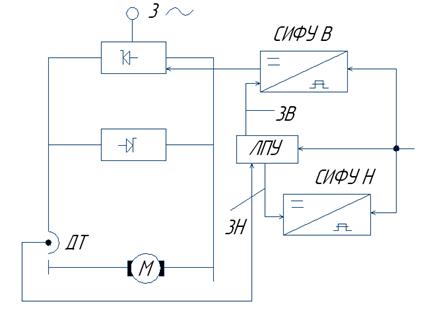
R→0 => I→∞ => к.з., чтобы этого не было, нужно раздельное управление тиристорами (комплектами).
«Раздельное управление» достигается разрешением (или запрещением) импульсов на отдельный комплект.
«Совместное управление». Для этого нужно специальным образом согласовывать управление комплектами, силовое оборудование при этом усложняется, т.к. требуется ограничивать импульсы уравнительных токов между комплектами.
Для организации раздельной схемы управления используются специальные электронные схемы, называемые ЛПУ (логические переключающие устройства).
Их задача – разрешение/запрещение прохождения импульсов.
ЛПУ получает сигнал направления включения (Uупр) и сигнал датчика тока (ДТ) (переключение только в момент отсутствия тока после переданного переключения).
Выходные сигналы ЛПУ - 3В, 3Н (запрет)
Для надежности работы ЛПУ выдерживает паузу перед переключением компонентов τ=0.001с, это нужно для восстановления запирающих свойств тиристоров.
Щетки термоциклируют (то охлаждаются, то нагреваются).
Требования к межламельной изоляции жесткие – должны держать высокую температуру, знакопеременные усилия. Хороший результат дают композиты на основе слюды.
DUmax – максимальное напряжение межламельной изоляции. DUmax≤15…20 В.
ДПТ не бывают высоковольтными (не более 1000 В).
Единичная мощность двигателя Р≤10∙103 кВт.
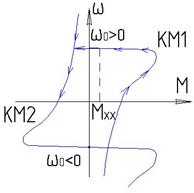
Торможение противовключением (ТПВ)
Условия реализации:


Пусть  тогда
тогда  и
и  и
и 
Пусть  тогда
тогда  и
и  и
и 
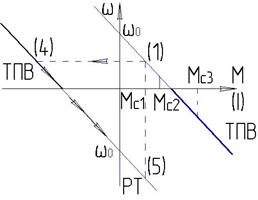
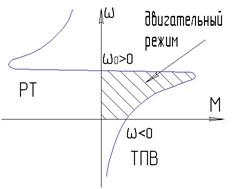
Условия попадания в режим ТПВ:
Режим возникает, если двигатель подготовлен для вращения в одну сторону, а силами нагрузки или по инерции вращается в противоположную.
Мс3>Мс2>Мс1 Þ w3<w2<w1, w3<0. При w=0 выходим на границу режима ТПВ.
работа в точке (1).
Поменяем знак напряжения: при внезапном изменении на противоположную полярность двигатель не успевает изменить скорости и его рабочая точка перемещается на вторую рабочую характеристику в точку (4). После остановки двигатель начнет разгон в противоположную сторону, пройдет зону двигательных режимов и, если характер нагрузки - постоянство активного момента, выйдет в зону РТ (точка (5)).
Схемотехника режима ТПВ:
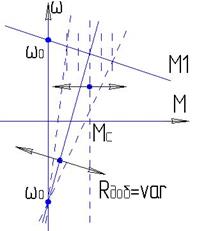
Судя по формуле в режиме ТПВ ток якоря определяется не разностью, а суммой напряжения питания и ЭДС Þ для ограничения тока якоря вводят добавочное сопротивление:
Rдоб необходимо!!! Иначе ток якоря может превысить номинальный ток в 5-7 раз.
Введение добавочного сопротивления смягчает характеристику, она становится близкой к постоянству момента Þ при имитации средствами электропривода постоянства момента используют режим ТПВ.
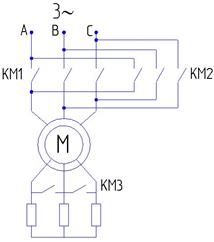
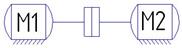 Использование ТПВ для снятия механических характеристик:
Использование ТПВ для снятия механических характеристик:
М1 – испытуемый двигатель;
 М2 – нагрузочная машина.
М2 – нагрузочная машина.
Необходимо разработать схему для снятия точек механической характеристики М1, путем изменения Мс.
Желательно, чтоб механические характеристики нагрузочной машины были возможно ближе к Мс(w)=const (нет зависимости Мс от w).
Для реализации используют глубокое противовключение.
На практике ТПВ чаще всего используется как элемент реверса, для форсированного разгона в противоположную сторону.
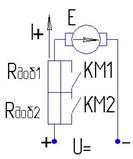
Для управления торможением следует предусмотреть изменение Rдоб.
Замыканием контакторов КМ1, КМ2 можно ступенчато изменять нагрузку, имитируя скачкообразное приложение внешней нагрузки, например при врезании инструмента в заготовку.
Тормозные режимы АД.
Для АД также существуют три режима торможения, различных по энергетике:
Торможение противовключением (ТПВ)
 Условие реализации: знак скорости не совпадает со знаком синхронной скорости
Условие реализации: знак скорости не совпадает со знаком синхронной скорости 
АДКЗ: тепловыделение происходит в цепи ротора (допустимо лишь кратковременно, с последующей активной вентиляцией).
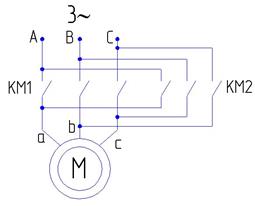
КМ1 обеспечивает w0>0.
Для изменения направления вращения используют КМ2 (переподключение фаз А→а, B→c, С→b).
Теорема о потерях при реверсе с противовключением: на этапе ТПВ в роторе двигателя выделяется энергия потерь, равная удвоенной кинетической энергии вращающихся механических частой двигателя  . На этапе разгона дополнительно в роторе выделяется энергия потерь
. На этапе разгона дополнительно в роторе выделяется энергия потерь 
Таким образом на этапе ТПВ в роторе выделяется 2Акин, а на этапе разгона – еще Акин, то есть за время реверса (десятые доли секунд) выделится 3Акин. Для АДКЗ регламентируется число прямых пусков и реверсов с ТПВ в час.
 Эта теорема не верна для частотного пуска (с перебором частоты), когда синхронная скорость w0 изменяется плавно, то есть для инверторного торможения.
Эта теорема не верна для частотного пуска (с перебором частоты), когда синхронная скорость w0 изменяется плавно, то есть для инверторного торможения.
 Другой вариант снижения потерь: торможение на пониженном напряжении.
Другой вариант снижения потерь: торможение на пониженном напряжении.
 Третий вариант снижения потерь: направлять энергию потерь так, чтобы она выделялась вне двигателя (использование АДФР).
Третий вариант снижения потерь: направлять энергию потерь так, чтобы она выделялась вне двигателя (использование АДФР).
При таком способе тепловыделение происходит в дополнительных сопротивлениях, вводимых замыканием КМ3.
При этом получаем 
За счет таких характеристик покупка более дорогого АДФР окупается.
Вентильные двигатели
 Вентильные двигатели – электрические машины, функционально объединенные с управляемым полупроводниковым коммутатором. Они близки по конструктивным признакам и характеристикам к коллекторным двигателям. Вентильные двигатели имеют частоту вращения вала, не зависящую от частоты сети, регулирование частоты вращения осуществляется путем изменения потока возбуждения и тока в якоре. Вентильные двигатели обладают высоким пусковым моментом и хорошими энергетическими показателями. Благодаря отсутствию коллекторно-щеточного узла вентильные двигатели имеют большую надежность и долговечность.
Вентильные двигатели – электрические машины, функционально объединенные с управляемым полупроводниковым коммутатором. Они близки по конструктивным признакам и характеристикам к коллекторным двигателям. Вентильные двигатели имеют частоту вращения вала, не зависящую от частоты сети, регулирование частоты вращения осуществляется путем изменения потока возбуждения и тока в якоре. Вентильные двигатели обладают высоким пусковым моментом и хорошими энергетическими показателями. Благодаря отсутствию коллекторно-щеточного узла вентильные двигатели имеют большую надежность и долговечность.
 Вентильные двигатели, как и коллекторные, имеют широкое разнообразие конструкций и схем включения обмоток.
Вентильные двигатели, как и коллекторные, имеют широкое разнообразие конструкций и схем включения обмоток.
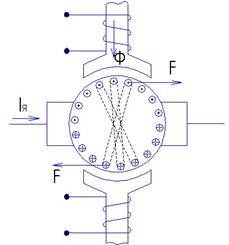
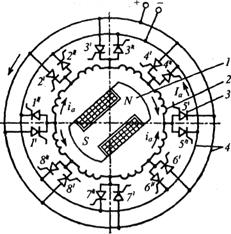
На рис. 1 представлена схема вентильного двигателя, который имеет такую же обмотку якоря, как и машина постоянного тока. На роторе вентильного двигателя 1 расположена обмотка возбуждения или постоянные магниты. В пазах статора располагается многофазная обмотка якоря 2, секции или группа секций которой присоединены через полупроводниковые блоки 3 к распределительным шинам 4 и сети.
В положении, показанном на рис. 1, открыты тиристоры 1' и 5". Ток якоря Iя в обмотке статора проходит по двум параллельным ветвям и создается вращающий момент. При движении ротора происходит переключение тиристоров датчиками положения ротора.
При повороте ротора по часовой стрелке на угол 360/m, где m — число отпаек (фаз) обмотки якоря (в рассматриваемой машине m = 8) происходит переключение тиристоров. Включаются тиристоры 2' и 6", а 1' и 5" — отключаются и т.д.
Таким образом, при вращении ротора вращается и поле якоря. При этом происходит электромеханическое преобразование энергии.
При реверсе работают пары тиристоров: 1" и 5', 2" и 6' и т.д. Включение и отключение тиристоров осуществляется путем подачи импульсов напряжения со специальных датчиков, реагирующих на положение ротора.
 + U - Коммутатор по схеме рис. 1 получается громоздким и вентильные двигатели по этой схеме практически не применяются. Чтобы упростить коммутатор, надо уменьшить число фаз машины.
+ U - Коммутатор по схеме рис. 1 получается громоздким и вентильные двигатели по этой схеме практически не применяются. Чтобы упростить коммутатор, надо уменьшить число фаз машины.
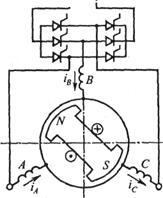
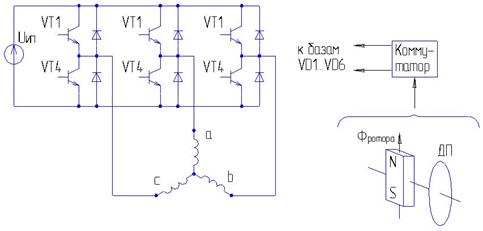
Простейшей схемой вентильного двигателя является двухфазная схема, но наибольшее применение нашла трехфазная схема (рис. 2). В этой схеме вентильная коммутация осуществляется трехфазным инвертором.
Система вентильной коммутации обычно состоит из датчика синхронизирующих сигналов, системы формирования сигналов управления и управляемого коммутатора.
 Датчик синхронизирующих сигналов задает порядок и частоту переключения элементов коммутатора. При позиционном управлении — это датчик положения ротора, а при фазовом — датчик фазы напряжения якорной обмотки. Датчик положения ротора представляет собой встроенный в машину узел, состоящий из чувствительных элементов, закрепленных на статоре, и сигнальных элементов, закрепленных на роторе. Обычно используются фотоэлектрические или магнитомодуляционные датчики.
Датчик синхронизирующих сигналов задает порядок и частоту переключения элементов коммутатора. При позиционном управлении — это датчик положения ротора, а при фазовом — датчик фазы напряжения якорной обмотки. Датчик положения ротора представляет собой встроенный в машину узел, состоящий из чувствительных элементов, закрепленных на статоре, и сигнальных элементов, закрепленных на роторе. Обычно используются фотоэлектрические или магнитомодуляционные датчики.
Система формирования сигналов управления обеспечивает усиление и формирование синхронизирующих сигналов.
Управляемый коммутатор осуществляет бесконтактные переключения в силовых цепях вентильного двигателя. Управляемый коммутатор выполняется на полупроводниковых приборах или других переключающих элементах, например герконах.
В управляемых коммутаторах на полупроводниковых приборах используются полностью управляемые приборы (транзисторы, двухоперационные тиристоры) и не полностью управляемые (тиристоры, семисторы).
По способу коммутации управляемые коммутаторы на не полностью управляемых полупроводниковых приборах можно разделить на три вида: с естественной, принудительной и смешанной коммутацией. При естественной коммутации переключения происходят под действием ЭДС якорной обмотки. При принудительной коммутации управление тиристорами осуществляется под действием коммутирующего напряжения отдельного источника либо напряжения питающей сети. При смешанной коммутации имеет место комбинация первого и второго способов.
Вентильные двигатели могут питаться от сети как постоянного, так и переменного тока. Если управляемый коммутатор питается от сети постоянного тока, то он представляет собой инвертор — преобразователь постоянного тока в переменный. Если управляемый коммутатор подключен к сети переменного тока, то он выполняет функции преобразователя частоты.
Электромеханическая часть вентильных двигателей постоянного тока, как правило, аналогична известным конструктивным модификациям синхронных машин. Для маломощных приводов используются двигатели с постоянными магнитами, а также гистерезисные, реактивные и индукторные двигатели. В приводах средней и большой мощности используются двигатели с электромагнитным возбуждением.
Характерной особенностью вентильных двигателей, отличающей их от двигателей постоянного тока, является наличие дополнительного канала управления по углу синхронизации инвертора. Этот канал используется для обеспечения необходимой жесткости механической характеристики и достижения большей перегрузочной способности.
Вентильные двигатели применяются и в приводах небольшой мощности, где нежелательно применение механического коммутатора (проигрыватели, приборы магнитной записи и др.).
 Вентильные двигатели большой мощности нашли применение там, где ранее использовались нерегулируемые асинхронные или синхронные двигатели. Выполнены вентильные двигатели мощностью 1600 кВт с регулированием частоты вращения для привода компрессоров холодильных машин и насосов циркуляционных систем.
Вентильные двигатели большой мощности нашли применение там, где ранее использовались нерегулируемые асинхронные или синхронные двигатели. Выполнены вентильные двигатели мощностью 1600 кВт с регулированием частоты вращения для привода компрессоров холодильных машин и насосов циркуляционных систем.
Ротором выступает постоянный магнит.
Обозначение диодов VD1…VD6.
ДП – датчик положения.
Коммутатор всегда включает VT1…VT6 так, чтобы магнитный поток статора был перпендикулярен магнитному потоку ротора, подобно тому, как это делается в ДПТ с помощью механического коммутатора.

При включенных VT2, VT3, VT4 диаграмма потоков такая:
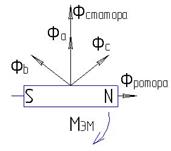 При Uип=0 двигатель не будет развивать момента, по мере увеличения напряжения будут увеличиваться и токи.
При Uип=0 двигатель не будет развивать момента, по мере увеличения напряжения будут увеличиваться и токи.
Механические характеристики такого двигателя такие же, как и у ДПТ.
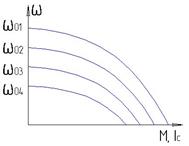 w01>w02>w03>w04
w01>w02>w03>w04
Uип1>Uип2>Uип3>Uип4
Шаговые двигатели
Шаговые, или импульсные двигатели питаются импульсами электрической энергии, а ротор в зависимости от полярности импульсов перемещается по часовой стрелке или против часовой стрелки на определенный угол-шаг. Шаговые двигатели обычно маломощные индикаторные. Основная задача их отрабатывать электрические импульсы, преобразуя электрические сигналы в угловые перемещения.
Для управления шаговыми двигателями используются коммутаторы на полупроводниковых элементах, формирующие импульсы, которые подаются на фазы обмотки шагового двигателя. Число фаз выбирается равным четырем или шести. Шаг двигателя может быть от 180 до 1°. В специальных установках шаг может быть несколько минут.
Шаговые двигатели могут быть выполнены на основе конструкции любых синхронных двигателей. Так как основным требованием к шаговым двигателям является точность отработки сигналов и высокая частота импульсов, предпочтительны конструкции шагового двигателя, выполненного на базе реактивных и индукторных синхронных машин.
Шаговые двигатели характеризуются предельной частотой импульсов, которые двигатель обрабатывает без пропуска шага. Пусковые свойства шаговых двигателей характеризуются частотой приемистости — максимальной частотой импульсов, при которой возможен пуск без потери шагов. В зависимости от типа шагового двигателя и нагрузки частота приемистости колеблется от 10 до 104 Гц.
Математическое описание процессов преобразования энергии при импульсном питании осуществляется по уравнениям электромеханического преобразования энергии и их видоизменениям, когда форма напряжения — импульсная.
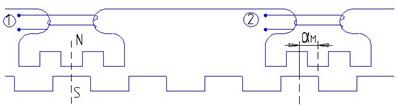
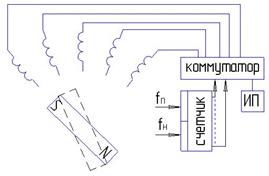 Счетчик подсчитывает количество fп – прямых и fн – обратных "шагов".
Счетчик подсчитывает количество fп – прямых и fн – обратных "шагов".
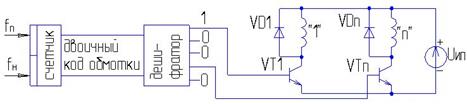
Одновременно включена только одна обмотка.

p – число пар полюсов;
m – фазность двигателя.
Характеристики двигателя:
 1. aМ – цена импульса; определяет угловой шаг, совершаемый двигателем при единичном переключении (угол поворота за шаг).
1. aМ – цена импульса; определяет угловой шаг, совершаемый двигателем при единичном переключении (угол поворота за шаг).
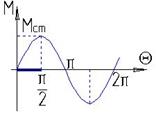
2. Угловая характеристика двигателя
Для активного ротора:
угол Q снят для однополюсной однофазной машины.
 Q=90° - нулевой момент; при Q>90° момент меняет знак.
Q=90° - нулевой момент; при Q>90° момент меняет знак.
Двигатель выполняет свои функции только в этом диапазоне изменения углов.
Мст – максимальный момент удержания.
При большой внешней нагрузке возможна потеря шага.
3. Частота приемистости – максимальная частота, до которой разгоняется двигатель при скачкообразном приложении импульсов из состояния покоя. Разгон при этом происходит за период одного импульса (подразумевается пуск на холостом ходу, то есть без нагрузки и присоединенных маховых масс). Если подавать импульсы часто, то наступит такая частота, которую двигатель не обработает.
4. Предельная динамическая характеристика – характеристика, связывающая частоту приемистости и момент инерции присоединенного к двигателю механизма.
Характеристика входит в документацию.
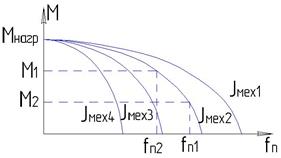 М2>М1 Þ fп2<fп1
М2>М1 Þ fп2<fп1

Число шагов двигателя на оборот.
Для двигателя с активным ротором:
Число шагов зависит от способа управления:
симметричный (поочередное включение каждой обмотки) и несимметричный (одновременно может включаться несколько обмоток)
С помощью несимметричного способа управления можно получить дополнительные положения ротора.
Например, достигнуть углового шага a/2.
однополярный и разнополярное (удвоение числа возможных положений)
При однополярном симметричном управлении число положений n=pm, где р – число пар полюсов; m – число фаз двигателя.
р = число параллельных ветвей в любой фазе.
При однополярном несимметричном управлении n=2pm
При разнополярном несимметричном управлении n=4pm
Для двигателя с пассивным (перемагничиваемым) ротором:
 zротора=zстатора-1
zротора=zстатора-1
Пусть ток подан в обмотку j Þ на роторе появляется магнитное поле, которое противоположно магнитному полю статора, и полюса притягиваются. При этом минимизируется энергия электромагнитного поля за счет поворота ротора. Она минимальна, когда к








