

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Топ:
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Когда производится ограждение поезда, остановившегося на перегоне: Во всех случаях немедленно должно быть ограждено место препятствия для движения поездов на смежном пути двухпутного...
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
 У ДПТ ПВ обмотка возбуждения включена последовательно с обмоткой якоря и его поток Ф =f(iя) зависит от нагрузки машины. Уравнение электромеханической характеристики:
У ДПТ ПВ обмотка возбуждения включена последовательно с обмоткой якоря и его поток Ф =f(iя) зависит от нагрузки машины. Уравнение электромеханической характеристики:

При изменении U на зажимах дв-ля хар-ки перемещаются вниз или вверх по отношению к естественной. При ↑ сопротивления якорной цепи ωдв↓ и характеристики смещаются вниз. Жесткость характеристик ↓. Из графиков видно, что ω↓ при увеличении нагрузки. Характеристики являются мягкими. Поэтому ДПВ непригодны для ЭПов, требующих постоянства скорости при меняющейся нагрузке.
Система генератор – двигатель (ГД).
Принципиальная схема системы Г-Д. В системе ГД в кач-ве управляемого преобр-ля используется генератор пост. тока независимого возб-ия, приводимый во вращение АД или СД. В кач-ве приводного дв-ля рабочей машины используется ДНВ.
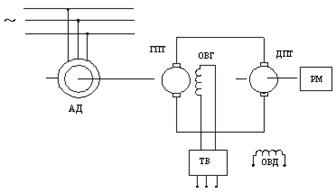 Пуск осущ-тся включением сетевого (гонного) Д, вращающего Г. Приводной Д перед этим должен быть полностью возбужден, т.е. его магн. поток должен быть номинальным. Напряжение на ОВ ГПТ д/б =0. При подаче напряжения на ОВ Г и его ↑, он будет развивать ЭДС, появится напряжение на якоре ДПТ и последний будет разгоняться.
Пуск осущ-тся включением сетевого (гонного) Д, вращающего Г. Приводной Д перед этим должен быть полностью возбужден, т.е. его магн. поток должен быть номинальным. Напряжение на ОВ ГПТ д/б =0. При подаче напряжения на ОВ Г и его ↑, он будет развивать ЭДС, появится напряжение на якоре ДПТ и последний будет разгоняться.
В случае гонного АД с увеличением нагрузки на валу приводного ДПТ возрастает тормозной момент ГПТ, что приводит к снижению ск-ти гонного АД, следовательно, снижению ск-ти ГПТ и его ЭДС, что сказывается и на ск-ти ДПТ. В мощных ЭПах по системе ГД это снижение составляет (1,5¸2)%.
«+» АД - простота, надежность, малая колебательность. «+» СД -меньшая критичность к колебаниям  , возможность работать с опережающим током. Обычно СД используется при мощностях ген-ра в сотни и тысячи кВт.
, возможность работать с опережающим током. Обычно СД используется при мощностях ген-ра в сотни и тысячи кВт.
Питание ОВ ГПТ в современных системах ГД, осуществляется от тиристорного или транзисторного ТВ. Осн. видом ТВ является ТП с раздельным упр-ем комплектами  вентилей. Зависимость вых. напряжения упр-ия UУ на рис. Ее раб. участок можно считать линейным. Динам. процессы ТВ описываются ур-м
вентилей. Зависимость вых. напряжения упр-ия UУ на рис. Ее раб. участок можно считать линейным. Динам. процессы ТВ описываются ур-м 
Пренебрегая гистерезисом магнитной цепи Г и считая его ненасыщенным, для линейного участка зависимости EГ=f(UВГ), можно написать: 
 ,
,
где  -при wГ=const;
-при wГ=const; 
Уравнение мех. хар-ки дв-ля в системе ГД можно получить из ур-ия равновесия ЭДС в як. цепи.
 ,
,
Здесь 
Выразив ток iя через момент двигателя получим: 
Здесь b – модуль статической жесткости мех. хар-ки двигателя в системе ГД.
Ур-ие мех. хар-ки дв-ля для статического режима можно представить в виде:  или
или  или
или  (ФНД – ном. поток Д).
(ФНД – ном. поток Д).
Семейство мех. хар-к Д в системе ГД, соответствующее различным значениям ЭДС генератора при СД, на рис.
 Жесткость основной хар-ки дв-ля ~ в 2 раза меньше, чем при питании его от сети с U=const, вследствие того, что в як. цепи кроме сопротивления якоря Д имеется еще и сопротивление якоря ген-ра, а они ~ одинаковы. Но скорость идеального ХХ Д в разомкнутой системе ГД больше, чем при питании Д от сети с U=const, т.к. номин. ЭДС генератора, определяющая w0 Д, больше, чем номин. напряжение Д, определяющее w0 при питании его от сети, т.е.
Жесткость основной хар-ки дв-ля ~ в 2 раза меньше, чем при питании его от сети с U=const, вследствие того, что в як. цепи кроме сопротивления якоря Д имеется еще и сопротивление якоря ген-ра, а они ~ одинаковы. Но скорость идеального ХХ Д в разомкнутой системе ГД больше, чем при питании Д от сети с U=const, т.к. номин. ЭДС генератора, определяющая w0 Д, больше, чем номин. напряжение Д, определяющее w0 при питании его от сети, т.е.
 , т.к.
, т.к.  .
.
Хар-ка двигателя при питании его от сети с U=UH изображена пунктиром.
Режимы работы, торможение, расчет характеристик, основные показатели. Изменяя поток возбуждения (его ЭДС) можно осущ-ть непрерывное плавное упр-ие моментом и скоростью ЭПа во всех 4-х квадрантах коорд. системы при b=const. На рис. показано в 1-м квадранте семейство хар-к при ЕГ=var.
 Режимы. Двигательный режим заштрих. обл-ть в 1 и 3 квадрантах. Динам.торможение - одна хар-ка, проход. через начало координат. Режим противовключения -область между осью моментов и характеристикой динамического торможения во 2 и 4 квадрантах.
Режимы. Двигательный режим заштрих. обл-ть в 1 и 3 квадрантах. Динам.торможение - одна хар-ка, проход. через начало координат. Режим противовключения -область между осью моментов и характеристикой динамического торможения во 2 и 4 квадрантах.
Генераторный режим с рекуперацией энергии в сеть -область во 2 и 4 квадрантах, заключенная между осью скоростей и хар-кой динамического торможения.
Торможение с отдачей энергии в сеть. ↓ или снимаем возб-ие генератора, ЭДС дв-ля станет больше ЭДС генератора. Д превратится в генератор. Ток в якорной цепи  изменит направление на противоположное. Генератор превратится в Д, работающий с ослабленным магнитным потоком. Скорость его ↑ и он будет раскручивать гонный Д со сверхсинхронной скоростью. Гонный Д превращается в генератор. Он будет отдавать в сеть акт. энергию, потребляя из сети реакт. энергию.
изменит направление на противоположное. Генератор превратится в Д, работающий с ослабленным магнитным потоком. Скорость его ↑ и он будет раскручивать гонный Д со сверхсинхронной скоростью. Гонный Д превращается в генератор. Он будет отдавать в сеть акт. энергию, потребляя из сети реакт. энергию.
Кинет.энергия вращающихся инерционных масс приводным дв-лем преобразуется в электрическую, поскольку он теперь работает генератором. В сеть отдается эта энергия за исключением потерь, имеющих место во всех элементах ЭПа.
Структурная схема
Достоинства и недостатки.
 Достоинства системы ГД:
Достоинства системы ГД:
1.Отсутствуют громоздкие пусковые реостаты и потери в них.
2Упр-ие процессами перенесено в цепи возбуждения, имеющие небольшие токи, что облегчает и удешевляет аппаратуру.
3.Сравнительно высокий диапазон регулирования.
Недостатки системы ГД:
1.Высокая установленная мощность, превышающая в 3 раза мощность приводного дв-ля.
2.Сравнительно низкий КПД, равный  .
.
3.Повышенная крутизна механических характеристик.
4.Высокая первоначальная стоимость машинного оборудования.
Система тиристорный преобразователь – двигатель (ТП – Д).
В системе ТП – Д двигатель постоянного тока независимого возбуждения питается от ТП. Принципиальная схема системы изображена на рис.  Среднее значение выпрямленного напряжения ТП.
Среднее значение выпрямленного напряжения ТП.  , где U2 – действующее значение фазного U вторичной обмотки питающего трансф-ра.
, где U2 – действующее значение фазного U вторичной обмотки питающего трансф-ра.
m – число пульсаций выпрямленного U; a - угол задержки открывания тиристоров; Ud0 – макс. значение среднего выпрямленного U при a=0. Кривые выпрямленного U с учетом явления коммутации вентилей, характеризуемой углам g, изображены на рис. Зависимость ЭДС ТП от U управления Uу при линейной хар-ке СИФУ представлена на следующем рисунке. Ур-е мех. хар-ки двигателя для любого режима работы  .
.
 В режиме непрерывного тока мех. хар-ки двигателя в системе ТП-Д при принятых допущениях аналогичны хар-м системы ГД. Семейство статич. мех. хар-к при различных a, изобра
В режиме непрерывного тока мех. хар-ки двигателя в системе ТП-Д при принятых допущениях аналогичны хар-м системы ГД. Семейство статич. мех. хар-к при различных a, изобра  жено на рис 3. Это прямые, отсекающие на оси ординат отрезки, соответствующие скорости идеального холостого хода При раздельном упр-ии комплектами вентилей или при питании от однокомплек-тного ТП в области малых нагрузок ток становится прерывистым, причем при Uy=0 и
жено на рис 3. Это прямые, отсекающие на оси ординат отрезки, соответствующие скорости идеального холостого хода При раздельном упр-ии комплектами вентилей или при питании от однокомплек-тного ТП в области малых нагрузок ток становится прерывистым, причем при Uy=0 и  среднее значение Ud становится
среднее значение Ud становится  . Появляется зона прерывистых I, она тем больше, чем больше угол a. Появление зоны прерывистых токов обусловлено тем, что в определенные промежутки времени мгновенное значение выпрямленого U преобразователя становится < встречно действующей ЭДС двигателя, что видно из графика выпрямленногоU, как следует из ур-я равновесия ЭДС, разность Ud-e становится «-». Ток изменит направление на противоположное. Т.к. вентили обладают односторонней проводимостью,I=0. Вентили закрываются I появляется вновь когда Ud станет>е. При больших нагрузках несмотря на то, что в определенные промежутки времени мгновенное значение Ud становится < ЭДС двигателя, ток не прерывается, явл-ся непрерывным. При больших нагрузках запас эл.магнитной энергии в цепи выпрямленного тока значительный. Возникающая при исчезновении тока ЭДС самоиндукции складывается с мгновенным выпрямленным U ТП и в сумме они превышают ЭДС двигателя. Разность между этой суммой и ЭДС двигателя «+» и I не прерывается. При малых нагрузках ЭДС самоиндукции оказывается недостаточной для поддержания I и он прерывается. Переходу от режима непрерывного тока к прерывистому соответствует режим начально-непрерывного тока, являющегося граничным между двумя указанными. При уменьшении нагрузки скорость двигателя возрастает и увеличивается его ЭДС, являющаяся противодействующей, что вызывает уменьшение тока нагрузки преобразователя. Это приводит к уменьшению падения напряжения на внутренних сопротивлениях схемы, а также к уменьшению потерь среднего напряжения, обусловленного явлением коммутации. В связи с этим Ud возрастает. В зоне малых и нулевых нагрузок механические характеристики двигателя имеют мягкий характер.
. Появляется зона прерывистых I, она тем больше, чем больше угол a. Появление зоны прерывистых токов обусловлено тем, что в определенные промежутки времени мгновенное значение выпрямленого U преобразователя становится < встречно действующей ЭДС двигателя, что видно из графика выпрямленногоU, как следует из ур-я равновесия ЭДС, разность Ud-e становится «-». Ток изменит направление на противоположное. Т.к. вентили обладают односторонней проводимостью,I=0. Вентили закрываются I появляется вновь когда Ud станет>е. При больших нагрузках несмотря на то, что в определенные промежутки времени мгновенное значение Ud становится < ЭДС двигателя, ток не прерывается, явл-ся непрерывным. При больших нагрузках запас эл.магнитной энергии в цепи выпрямленного тока значительный. Возникающая при исчезновении тока ЭДС самоиндукции складывается с мгновенным выпрямленным U ТП и в сумме они превышают ЭДС двигателя. Разность между этой суммой и ЭДС двигателя «+» и I не прерывается. При малых нагрузках ЭДС самоиндукции оказывается недостаточной для поддержания I и он прерывается. Переходу от режима непрерывного тока к прерывистому соответствует режим начально-непрерывного тока, являющегося граничным между двумя указанными. При уменьшении нагрузки скорость двигателя возрастает и увеличивается его ЭДС, являющаяся противодействующей, что вызывает уменьшение тока нагрузки преобразователя. Это приводит к уменьшению падения напряжения на внутренних сопротивлениях схемы, а также к уменьшению потерь среднего напряжения, обусловленного явлением коммутации. В связи с этим Ud возрастает. В зоне малых и нулевых нагрузок механические характеристики двигателя имеют мягкий характер.
Режимы: Двигатель в системе ТП – Д может работать во всех режимах. Двигательному режиму соответствует область в 1 и 3 квадратах, режиму динамического торможения соответствует характеристика, проходящая через начало координат при  . Режиму противовключения соответствует область, заключенная между осью моментов и характеристикой динамического торможения. Режиму рекуперации соответствует область между осью ординат во 2 и 4 квадратах и характеристикой динамического торможения.
. Режиму противовключения соответствует область, заключенная между осью моментов и характеристикой динамического торможения. Режиму рекуперации соответствует область между осью ординат во 2 и 4 квадратах и характеристикой динамического торможения.
Основным способом торможения в системе ТП – Д является торможение с рекуперацией энергии в сеть. Для рекуперации энергии в сеть необходимо преобразовать энергию постоянного тока, источником которой при w>w0 становится двигатель, в энергию переменного тока. Для этого ТП нужно перевести в инверторный режим.
В выпрямительном режиме преобразователя активная составляющая Ia1 первой гармоники фазного тока совпадает по направлению с напряжением (ЭДС) фазы, а реактивная Ip1 – отстает на 90°. Следовательно, преобразователь потребляет из сети активную и реактивную мощность. Если j1 станет больше 90°, что при g=0 соответствует a>90°, то Ip1, будет по прежнему отставать от Еф на 90°, а Ia1 будет направлен встречно с ЭДС фазы. В этом случае преобразователь будет отдавать в сеть активную мощность при одновременном потреблении реактивной мощности. Этот режим и является инверторным. В нем источником тока является ЭДС машины постоянного тока, которая превышает напряжение преобразователя.
Т.о. для получения инверторного режима работы ТП необходимо, чтобы a был больше 90°, т.е. необходимо заставить преобразователь путем увеличения угла a принудительно выпрямлять отрицательные полуволны питающего напряжения сети. Сам он не будет это делать, поэтому инверторный режим может иметь место только при принудительной коммутации. При этом изменится знак напряжения Ud. Угол управления в этом режиме отсчитывается влево от точки пересечения синусоид напряжения питающей сети в отрицательной области и называется, как известно, углом опережения b. Он равен b=p-a. Вместо угла коммутации g для инверторного режима принято использовать понятие угла запирания d=b-g или, иначе, угла запаса.
 |
Основные достоинства системы ТП-Д:
1. Высокое быстродействие преобразователя, т.к. TП=0,01 с
2. Более высокий КПД по сравнению с системой ГД
3. Незначительная мощность управления
4. Большой срок службы
5. Малые габариты и вес преобразователя
6. Простота осуществления резервирования и взаимозаменяемости блоков и узлов ТП
7. При использовании нереверсивного преобразователя установленная мощность системы составляет ~ 2 Pдвиг, т.е. меньше, чем в системе ГД. При использовании реверсивного ТП она ~ равна мощности в системе ГД
Недостатки сиcтемы ТП-Д:
1. Уменьшение коэффициента мощности преобразователя при уменьшении скорости
2. Значительное искажение кривой тока, потребляемого преобразователем из сети
3. Неминуемые при регулировании угла a колебания реактивной мощности, особенно при большой мощности электропривода, приводящие к колебаниям напряжения в питающей сети
Регулируемый электропривод переменного тока с вентильным Д-ем (ВД).
ВД состоит из СД и ПЧ с промежуточным звеном пост. I или с непосредственной связью (НПЧ), вентили которого коммутируются в функции положения ротора или магнитного потока двигателя. ОВ Д располагается на роторе и питается от постороннего источника пост. I. Есть двигатели с возбуждением постоянными магнитами. Вентильный коммутатор, т.е. инвертор, управляемый в функции положения ротора, выполняет роль коллектора обычной машины пост. I. Он присоединяется к обмотке статора СД и осуществляет распределение пост. I с преобразованием его в переменный. CД, работающий совместно с таким инвертором приобретает свойства машины пост. I и иногда его называют бесколлекторной машиной постоянного тока БМПТ или ВД пост. I. Мех-ие хар-ки ВД аналогичны хар-кам Д пост. I с независимым возбуждением.
«+» ВД по сравнению с машиной пост. I – отсутствие коллектора, что повышает надежность, позволяет питать Д повышенным U,→осуществлять бестрансфор-ное подключение силовой части ЭП к сети. Момент, возникающий в вентильном Д (как синхронной машине) подчиняется зависимости  , где
, где  РП – число пар полюсов Д; q – угол между осями полей статора и ротора (между векторами потокосцеплений, см. рисунок); СМ – постоянная момента (коэфф. пропорц-ти между I и моментом ВД,
РП – число пар полюсов Д; q – угол между осями полей статора и ротора (между векторами потокосцеплений, см. рисунок); СМ – постоянная момента (коэфф. пропорц-ти между I и моментом ВД,  ); Iм – макс. мгновенное значение I одной фазы статора. «-» означает, что направление момента противоположно направ-ию угла рассогласования q.
); Iм – макс. мгновенное значение I одной фазы статора. «-» означает, что направление момента противоположно направ-ию угла рассогласования q.
 С целью ограничения изменений момента электронная система регулирования обеспечивает ограничение изменения угла q в окрестностях 900 в диапазоне ±300 (в ту и другую сторону), как показано на угловой (моментной) характеристике СД. Именно такое регулирование и осуществляется ТК, т.е. инвертором, в функции положения ротора. Физическое положение ротора определяется с помощью датчика положения ротора ДПР, находящегося на валу Д. Переключение фаз Д производится тиристорным коммутатором (ТК) в функции сигналов ДПР. ДПР состоит из трех пар светофотодиодов, жестко привязанных к статору, в зазоре, между которыми вращается диск, закрепленный на валу ротора. На диске по его периметру имеются прорези. Число их определяется числом пар полюсов ВД. Угловая длина прорези на диске определяется как
С целью ограничения изменений момента электронная система регулирования обеспечивает ограничение изменения угла q в окрестностях 900 в диапазоне ±300 (в ту и другую сторону), как показано на угловой (моментной) характеристике СД. Именно такое регулирование и осуществляется ТК, т.е. инвертором, в функции положения ротора. Физическое положение ротора определяется с помощью датчика положения ротора ДПР, находящегося на валу Д. Переключение фаз Д производится тиристорным коммутатором (ТК) в функции сигналов ДПР. ДПР состоит из трех пар светофотодиодов, жестко привязанных к статору, в зазоре, между которыми вращается диск, закрепленный на валу ротора. На диске по его периметру имеются прорези. Число их определяется числом пар полюсов ВД. Угловая длина прорези на диске определяется как  , а угловое расстояние между парами светофотодиодов как
, а угловое расстояние между парами светофотодиодов как  .
.
 Вых. сигналы ДПР преобразуются схемой распределения в 1200 импульсы управления тиристорами, обеспечивая, то, проводящее состояние каждому тиристору в течение 1200 за один период сигнала ДПР.
Вых. сигналы ДПР преобразуются схемой распределения в 1200 импульсы управления тиристорами, обеспечивая, то, проводящее состояние каждому тиристору в течение 1200 за один период сигнала ДПР.
 Алгоритм работы ДПР при одной паре полюсов можно проследить по схеме, указав в таблице последовательность включений тиристоров. Во включенном состоянии одновременно находятся два тиристора из шести.
Алгоритм работы ДПР при одной паре полюсов можно проследить по схеме, указав в таблице последовательность включений тиристоров. Во включенном состоянии одновременно находятся два тиристора из шести.
Ключи КЛ1 и КЛ2 (см.схему) выполняют 2 независимые ф-ии: 1) Обеспеч. режим коммутации I с тиристора на тиристор ввиду невозможности самост-ого выключения тиристоров, т.к. тиристоры ТК в силовой схеме подключаются к источнику пост. U, то для их отключения и восстановления ими запирающих свойств необходимо кратковременно разрывать силовую цепь ТК. 2) Обеспеч. поддержание заданной величины I через обмотки Д, т.е. участвуют в регулировании тока.
Ф-ия коммутации I с тиристора на тиристор выполняется путем полного отключ. ТК от ист. питания. Время обесточенного состояния ТК составляет» 300 мкс. Чтобы снизить пульсации момента ВД формируется график изменения I статора Д, пульсации которого обратны пульсациям момента (временные диаграммы).
 При регулировании тока исп-ся 3 режима включения тиристоров (3 режима работы ключей КЛ1 и КЛ2). 1)Режим Р2, когда оба ключа включены. 2)Режим Р1, когда в проводящем состоянии находится только один из ключей. 3)Режим Р0, когда оба ключа выключены.
При регулировании тока исп-ся 3 режима включения тиристоров (3 режима работы ключей КЛ1 и КЛ2). 1)Режим Р2, когда оба ключа включены. 2)Режим Р1, когда в проводящем состоянии находится только один из ключей. 3)Режим Р0, когда оба ключа выключены.
В режиме Р2 напряжение источника питания прикладывается к обмоткам статора  .Знак ''+'' соответствует двигательному режиму, знак ''-'' –тормозному. При любой скорости Uпит > Eдв.
.Знак ''+'' соответствует двигательному режиму, знак ''-'' –тормозному. При любой скорости Uпит > Eдв.
В режиме Р1, когда, например, замкнут КЛ1, а КЛ2 разомкнут, ток протекает через КЛ1, тиристор V3 фазы статора В, А, диод моста возврата реактивной энергии и снова КЛ1. При таком варианте две обмотки статора ВД являются замкнутыми на себя и такой режим является режимом динамического торможения, для которого уравнение равновесия ЭДС имеет вид:  . В Р0 ток фаз статора протекает через мост возврата реактивной энергии, направленный навстречу источнику питания. Такой режим является режимом противовключения. Уравнение равновесия ЭДС: ; rф - активное сопротивление двух фаз статора.
. В Р0 ток фаз статора протекает через мост возврата реактивной энергии, направленный навстречу источнику питания. Такой режим является режимом противовключения. Уравнение равновесия ЭДС: ; rф - активное сопротивление двух фаз статора.
Область применения. Достоинства.
Регулирование I осуществляется двумя комбинациями режимов включения ключом КЛ1 и КЛ2. В двигательном и тормозном режимах больших скоростей регулирование комбинацией тока относительно заданного значения осуществляется режимов Р1, Р2, Р0, как показано на графике. В ВД средней и большой мощности часто используют СД обычной конструкции и естественную коммутацию вентилей в функции напряжения статора двигателя. Такие ВД применяются в приводах с мало- и медленно изменяющейся длительной нагрузкой. ВД на скорости <100 об/мин и >3000 об/мин не могут быть выполнены на основе СД обычной конструкции. Для ВД создаются СД специальных конструкций, в частности, бесщеточные с возбуждением постоянными магнитами. Они выполняются мощностью до 30кВт с максимальной скоростью 3000 об/мин, а также многополюсные тихоходные.
Т.к. ВД обладает характеристиками машины постоянного тока независимого возбуждения, то все способы регулирования его угловой скорости характеризуются такими же показателями, что и у ДНВ, (изменением напряжения и тока возбуждения).
У ВД можно получить и характеристику двигателя последовательного возбуждения, если обмотку возбуждения включить последовательно в цепь выпрямленного тока на входе инвертора.
Возможен и генераторный режим с рекуперацией энергии в сеть. В этом случае УВ переводится в инверторный режим, а управляемый инвертор – в выпрямительный при w>w0.
Перспективно применение ВД для мощных тихоходных электроприводов, например, для шаровых мельниц, и сверхбыстроходных (до 10000 об/мин) сверхмощных электроприводов, например, нагнетателей, в шаговом электроприводе, в асинхронных электромеханических каскадах, станочном электроприводе, в многодвигательных регулируемых электроприводах с синхронной связью.
Энергетические ресурсы.
Доля первичных энергоресурсов в производстве энергии: нефть – 39%,газ – 23%, уголь – 27%, гидро – 6%, уран – 4%, др. источники – 1%. Оставшиеся 7% возмещаются использованием возобновляемых источников энергии, т.е. воды, солнца, ветра, биомассы и другой геотермики.
Среди геологических топливно-энергетических ресурсов, совокупный объем которых оценивается в 6,3 трлн. тонн условного топлива (т.у.т.), самые крупные запасы в мире принадлежат твердому топливу. Его объемы составляют 3971 млрд. т.у.т. Меньше всего в природе представлены запасы урана (674,6 млрд. т.у.т.). Для нефти и газа характерна средняя степень обеспеченности - 788 млрд. и 851 млрд. т.у.т., соответственно.
Долевая структура геологических топливно-энергетических ресурсов в мире: уголь – 63,3%,газ – 13,5%, нефть – 12,5%, уран – 10,7%.
Современное состояние мировой энергетики характеризуется рядом противоречивых особенностей:
Во-первых, это связано с неравномерностью и дисперсностью размещения геологических энергетических ресурсов по регионам земного шара. Так, крупнейшими энергосырьевыми державами мира, обеспечивающими в сумме более двух третей мирового объема добычи, являются страны Ближнего и Среднего Востока, Китай, Россия, отчасти Австралия (по углю) и ЮАР (по углю). В то же время наименьше всего обеспечены энергетическими ресурсами страны Северной Америки, Западной Европы, а также АТР, которые, тем не менее, являются основными потребителями сырья.
Во-вторых, неравномерность потребления энергетических ресурсов по регионам земного шара. В результате экономически развитые страны, обеспеченные наименьшим количество сырья, потребляют около 80% энергоресурсов, добываемых и производимых в мире. При этом, среднедушевое энергопотребление в них достигает 11-13 тыс. т.у.т., что более чем в 6 раз выше среднемирового показателя (2 тыс. т.у.т.).
В-третьих, в мире существует резкая диспропорция между объемом различных видов топлива в разведанных запасах и их долей в производстве энергии. В частности, нефть и газ обеспечивают 61% мирового энергопроизводства, хотя на них приходится только 26% разведанных запасов, а уголь, при наилучшей обеспеченности доказанными запасами (63,3%), вырабатывает лишь 26% энергии (по другим оценка сегодня на уголь приходится 15%, на нефть – 40%, на газ – 45%)
|
|
|
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...

Таксономические единицы (категории) растений: Каждая система классификации состоит из определённых соподчиненных друг другу...

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

