Регулирование частоты вращения изменением подводимого напряжения производится следующими способами:
А) Система генератор-двигатель (Г-Д).
Б) Тиристорный преобразователь-двигатель (ТП-Д).
В) Широтно-импульсное регулирование.
А) Система Г-Д, рис.234.

Увеличивая ток возбуждения генератора iвг, возрастает поток Фг и Ег, а следовательно увеличивается напряжение на якоре двигателя и скорость возрастает. Регулирование происходит плавно при малых потерях энергии, рис. 234.
Эта система используется при большой мощности двигателя (подъёмники, прокатные станы, экскаваторы и т.д).
Б) Тиристорный преобразователь-двигатель.
В системе Г-Д используется большое число машин, что увеличивает стоимость установки и снижает надежность.
Поэтому в последнее время для регулируемого напряжения все чаще используются статические преобразователи, рис.235.

Увеличивая угол управления  - площадь полупериода уменьшается, уменьшается среднее значение напряжения - Uср, а следовательно уменьшается скорость вращения.
- площадь полупериода уменьшается, уменьшается среднее значение напряжения - Uср, а следовательно уменьшается скорость вращения.
В) Широтно-импульсное регулирование.
Идея регулирования напряжения подводимого к двигателю заключается в том, что, изменяя длительность подключения двигателя ключом (К) к сети, изменяется среднее значение напряжения, рис. 236. В качестве ключа используются схемы на базе тиристоров или транзисторов.
Изменяя время импульса tи изменяется скважность  ,
,
где tи - время импульса;
tп - время паузы.
Среднее значение U
ср=U
0e.
 .
.
Как видим, изменяя среднее значение напряжения, можно регулировать частоту вращения двигателя. Эта система широко используется вместо контактарно-резисторных систем.
6. Синхронный двигатель. Пояснить устройство синхронного двигателя и принцип его работы. Поясните работу СД при недовозбужденнии и перевозбужденнии (ib=var), используя векторную диаграмму.
 Синхронной машиной переменного тока называется такая машина, скорость которой находится в строгой зависимости от частоты. Ротор вращается с такой же скоростью, что и поле статора.
Синхронной машиной переменного тока называется такая машина, скорость которой находится в строгой зависимости от частоты. Ротор вращается с такой же скоростью, что и поле статора.  .
.
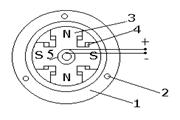
Статор (якорь) синхронной машины аналогичен асинхронной машине. Он набирается из листов электротехнической стали (1). В пазах статора расположены три фазы, сдвинутые относительно друг друга на 120 электрических градусов (2), (3) индуктор явнополюсной машины, (4) обмотка возбуждения, (5) контактные кольца. На роторе расположена обмотка возбуждения (2), которая питается от источника постоянного тока. Обмотку возбуждения в такой машине размещают в пазах сердечника ротора, выполненного из массивной стальной поковки высококачественной стали, и укрепляют немагнитными клиньями.
При мощности выше 300 КВт, синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что благодаря возбуждению постоянным током они могут работать с cosφ = 1 и не потребляют при этом реактивной мощности из сети, а при работе с перевозбуждением даже отдавать реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшается падение напряжения и потери в ней.
Из рис. 35-15 следует, что при непрерывном изменении тока возбуждения -  ток
ток  и
и  также беспрерывно изменяются, причем при некотором значении
также беспрерывно изменяются, причем при некотором значении  величина
величина  минимальна и = 1, а при увеличении
минимальна и = 1, а при увеличении  (режим перевозбуждения) и уменьшении
(режим перевозбуждения) и уменьшении  (режим недовозбуждения) против указанного значения величина тока
(режим недовозбуждения) против указанного значения величина тока  возрастает, так как растет его реактивная составляющая.
возрастает, так как растет его реактивная составляющая.
На рис. 35-16 представлен характер зависимостей  при разных значениях
при разных значениях  .
.
Минимальное значение  для каждой кривой определяет активную составляющую тока якоря
для каждой кривой определяет активную составляющую тока якоря  и величину мощности
и величину мощности  для которой построена данная кривая. Нижняя кривая соответствует Р = 0, причем
для которой построена данная кривая. Нижняя кривая соответствует Р = 0, причем  — значение тока возбуждения при Е = U.
— значение тока возбуждения при Е = U.
 , E0sinθ=const, P=mUcIcosφ=const, Icosφ=Ia=const.
, E0sinθ=const, P=mUcIcosφ=const, Icosφ=Ia=const.
Правые части кривых соответствуют перевозбужденной машине и отдаче в сеть индуктивного тока и реактивной мощности, а левые части — недовозбужденной машине, отдаче в сеть емкостного тока и потреблению реактивной мощности. Точка А на рис. 35-16 соответствует холостому ходу невозбужденной машины. Если изменять iB, то величина тока статора I будет измен. по величине и по фазе, т.е. можно рег-ть cosφ. Это св-во и определяет использование СД. Выпускаются СД обычно с опережающим cosφ=0.8. При Ia=I1 и будет минимальным. При этом режиме СД будет работать с cosφ=1 и реактивная мощность, не будет ни потребляться, ни отдаваться в сеть.
Асинхронный пуск двигателя. СД на время пуска превращается в асинхр. В пазах полюсных наконечников явнополюсного дв-ля помещается пуск. КЗ обмотка.
Ротор разгоняется до скольжения близкого к нулю (S=0,05), до подсинхр. скорости. На этом заканчивается первый этап.
Чтобы ротор дв-ля втянулся в синхронизм, необходимо создать в нем магнитное поле. Так как ротор разогнан до скорости близкой к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной (второй этап).
7. Потери в установившихся и переходных режимах электроприводов. Потери электроэнергии в установившемся режиме нерегулируемого и регулируемого электропривода. Потери энергии при переходных режимах нерегулируемого и регулируемого электропривода. Способы уменьшения потерь энергии в переходных режимах.
Мощность потерь в нерегулируемом электроприводе при работе его в установившемся режиме на естественной механической характеристике складывается из мощности потерь в двигателе и в механических передачах от двигателя к рабочему органу, т.е.
 , где K и V – постоянные и переменные потери в двигателе.
, где K и V – постоянные и переменные потери в двигателе.
К постоянным потерям относятся потери в стали, механические, а для двигателей постоянного тока независимого возбуждения и синхронных двигателей – еще и потери на возбуждение. Постоянные потери в действительности не являются постоянными, а изменяются при изменении скорости, напряжения и частоты сети. Переменные потери – это потери в обмотках, зависящие от тока нагрузки. Для двигателей постоянного тока  , для АД
, для АД  , здесь x – кратность тока нагрузки. Переменные потери для различных двигателей
, здесь x – кратность тока нагрузки. Переменные потери для различных двигателей  , а суммарные потери в двигателе
, а суммарные потери в двигателе  , где
, где  - коэффициент потерь. Потери мощности и энергии в установившемся режиме регулируемого электропривода.
- коэффициент потерь. Потери мощности и энергии в установившемся режиме регулируемого электропривода.
У ДПТ с независимым возбуждением без большой ошибки можно принять, что механические потери Км и потери в стали Кс равны
 , где (Км+Кс)н – механические потери и потери в стали при номинальной скорости. Переменные потери в якорной цепи
, где (Км+Кс)н – механические потери и потери в стали при номинальной скорости. Переменные потери в якорной цепи  , где w0р - скорость идеального холостого хода двигателя, соответствующая его регулировочной характеристике.
, где w0р - скорость идеального холостого хода двигателя, соответствующая его регулировочной характеристике.
Суммарные потери в регулируемом приводе с двигателем независимого возбуждения с учетом потерь на возбуждение Кв  . В АД к постоянным потерям относят механические потери Км, потери в стали статора Кс1 и ротора Кс2, в меди статора от намагничивающего тока Im, т.е.
. В АД к постоянным потерям относят механические потери Км, потери в стали статора Кс1 и ротора Кс2, в меди статора от намагничивающего тока Im, т.е.
 .
.
Переменные потери в роторной цепи Vрот определяются моментом и скольжением, а в статорной цепи Vстат они зависят только от момента. Если регулирование осуществляется при Мс=const, то потери в статоре постоянны, а в роторной цепи ≡ S.
Потери энергии при переходных процессах в нерегулируемом электроприводе.
В общем случае суммарные потери энергии в переходном процессе определяются выражением
 , здесь ∆Р – суммарные потери мощности, зависящие от нагрузки на валу, механической и электромагнитной инерции и ряда других факторов.
, здесь ∆Р – суммарные потери мощности, зависящие от нагрузки на валу, механической и электромагнитной инерции и ряда других факторов.
Мощность переменных потерь в якорной цепи ДПТ и роторе АД можно представить одним и тем же выражением и выражение потерь энергии записать в виде 
С точки зрения уменьшения пусковых потерь в статоре целесообразно применять АД с повышенным скольжением, имеющее большее r2, а также к.з. АД с глубоким пазом, т.к. последние имеют повышенное сопротивление ротора.
При торможении под нагрузкой потери энергии меньше, чем при торможении вхолостую.