Для расчета естественной механической характеристики используем формулу Клосса, в которую подставим полученные числовые значения величин и параметров.
 Н·м
Н·м
Тогда вращающий момент заданного ЭДУ
 (4.14)
(4.14)
где Mmax – максимальный момент на валу; Sk – критическое скольжение в долях единицы; S – текучесть скольжения в долях единицы.
Расчет желательно производить в одном из математических приложений ЭВМ.

Рис. 4.2 Результаты расчета механических свойств асинхронного двигателя
Асинхронные двигатели специального назначения
АД с внешним ротором
Принцип действия такого двигателя аналогичен принципу действия АД общего назначения, разница заключается в конструкции: статор с обмотками, вокруг которых создается переменное электромагнитное поле, расположен внутри короткозамкнутого ротора. Т.к. момент инерции такого ротора достаточно большой, то их используют в устройствах, требующих постоянную скорость вращения при переменной нагрузке на вал двигателя. Наружная поверхность ротора зависит от назначения двигателя: колесо, шкив, ролик, рольганг, маховик и т.д.
Момент на валу М2 у таких двигателей должен быть большим, поэтому для его увеличения питание таких двигателей осуществляется от сети с частотой ¦1 от 400 до 2000 Гц. Управление такими АД – частотное. Число пар полюсов равно 4 или 8. Для повышения жесткости механической характеристики эти двигатели изготавливают с малым скольжением (s=0,02-0,05).
АД с внешним ротором малой мощности получили большое применение в навигационной технике. Там основная задача ротора, который называется гироскоп, заключается в быстром наборе вращения и сохранении постоянного положения своей оси вращения в пространстве.
Линейные асинхронные двигатели (ЛАД)
Если обычный статор разрезать вдоль оси и развернуть, а трехфазную обмотку соединить звездой или треугольником, присоединив ее к сети переменного тока, то в воздушном зазоре возникнет переменное магнитное поле, ось которого будет перемещаться вдоль развернутой поверхности статора с «бегущей» скоростью v1, м/сек
v1=f1Lu/p (5.1)
где: f1 - частота питающей сети; Lu-длина индуктора; p-число пар полюсов ЛАД.
Параллельно индуктору расположен магнитопровод, в пазы которого заложены алюминиевые или медные стержни короткозамкнутой обмотки. «Бегущее» поле индуктора, сцепляясь со стержнями, наводит в них ЭДС Е2, которая, в свою очередь, создает ток I2. Эти токи, взаимодействуя с бегущим полем, создают электромагнитные силы Fэм, стремящиеся сдвинуть индуктор и магнитопровод вторичного элемента друг относительно друга в противоположные стороны.
Fэм=смрI2Ф2cosj2,
где: см – коэффициент, определяемый конструктивными особенностями двигателя; р – число пар полюсов ЛАД; I2-токи вторичного элемента; Ф2-вектор магнитного поля, создаваемого токами I2; j2- угол сдвига фаз между векторами ЭДС и тока вторичного элемента.
Т.к. индуктор закреплен, то линейно движется только вторичный элемент и электрическая энергия сети преобразовывается в механическую энергию поступательного движения.
Скольжение такого двигателя равно:
s=v1-v2/v1 (5.2)
Главный недостаток такого двигателя – явление краевого эффекта (см. рис. 5.1)
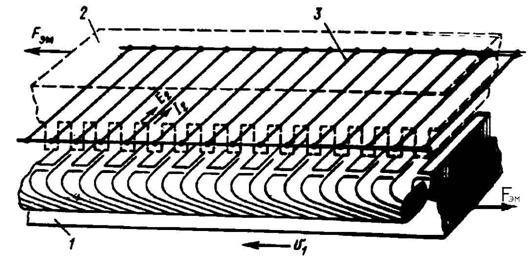
Рис 5.1
Разомкнутый статор создает целый комплекс нежелательных электромагнитных процессов, в том числе - появление «паразитных» тормозных усилий, направленных встречному движению подвижной части ЛАД, появление поперечно сдвигающих сил и др.
В основном, ЛАД – это маломощные двигатели, применяемые в приводах заслонок, в робототехнике и т.п., т.е. там, где допустим достаточно малый ход штока ЛАД. Однако в Японии на основе принципа действия ЛАД созданы скоростные электропоезда с двигателями большой мощности.
Регулирование таких двигателей только частотное.
Однофазные двигатели (ОАД)
Конструктивно ОАД отличаются от трехфазных АД наличием только одной обмотки на статоре, уложенной в 2/3 пазов сердечника, включенной в сеть переменного тока.
Принцип действия ОАД состоит в том, что ток сети I1, проходя по этой обмотке, создает в воздушном зазоре двигателя пульсирующий магнитный поток, неподвижный в пространстве, но меняющий величину вектора от +Фmax до –Фmax.Разложим этот вектор на два одинаковых по величине (равной 0,5Фmax), но вращающихся в разные стороны с одинаковой частотой вектора Фпр и Фобр.(см. рис. 5.2)
Рис. 5.2
Т.к. прямое направление Фпр соответствует направлению вращения ротора, то скольжение ротора относительно него соответствует скольжению двигателя:
sпр=s=(n1-n2)/n1 (5.3)
Т.к. частота вращения ротора относительно Фобр – отрицательна, то скольжение ротора относительно последнего имеет вид:
sобр=[n1-(-n2)]/n1 (5.4)
или после преобразования:
sобр=2-(n1-n2)/n1=2-sпр (5.5)
Прямой и обратный магнитные потоки наводят в роторе, соответственно, прямую и обратную ЭДС Е2пр и Е2обр, которые, в свою очередь, индуцируют переменные токи I2пр и I2обр с частотой, соответственно, равной:
f2пр=f1sпр
(5.6)
f2обр=f1sобр=f1(2-sпр)
Из выражения (5.6) видно, что частота обратного тока намного больше частоты прямого тока. Следовательно, индуктивное сопротивление обмотки ротора обратному току намного больше его же активного сопротивления и поэтому обратный ток оказывает сильное размагничивающее действие на создающий его Фобр.Из выражения (5.7) видно, что момент М2обр в установившемся режиме не оказывает существенного тормозящего действия.
М2обр=смФобрI2обрcosj2обр (5.7)
Механическая характеристика ОАД (см. рис. 5.3) представляет собой алгебраическую сумму моментов, создаваемых прямым и обратным магнитными потоками.

Рис. 5.3
В точке 1 Мрез = Мпр-Мобр=0; sобр=sпр=1; n2=0.
Пуск ОАД
Чтобы в таком двигателе появился пусковой момент Мп, необходимо, чтобы в нем появилось вращающееся магнитное поле. Для этого в 1/3 пазов сердечника статора помещают вспомогательную обмотку, которую соединяют с основной так, чтобы между векторами токов в них был электрический угол в 900. Для этих целей применяют фазосмещающий элемент: резистор, дроссель или конденсатор. Наилучшие пусковые характеристики у ОАД с конденсатором в качестве фазосмещающего элемента. После того, как скорость вращения ротора достигнет значения, приблизительно, 0,95n2ном, дополнительную обмотку отключают, и ОАД начинает работать в установившемся режиме.
Конденсаторные асинхронные двигатели (КАД)
КАД – это двухфазные двигатели, на статоре которых расположены две идентичные обмотки, занимающие одинаковое число пазов сердечника. Ротор – короткозамкнутый. Обмотки соединены параллельно, сдвиг по фазе между векторами обеспечен конденсатором Сраб (см. рис.5.4). Обмотка А включена в сеть непосредственно, а обмотка Б – через рабочий конденсатор. Обе обмотки включены постоянно, что создает вращающееся магнитное поле в воздушном зазоре двигателя, это позволяет получить достаточно жесткую рабочую часть механической характеристики.

Рис. 5.4
Емкость рабочего конденсатора:
Сраб = Iacosja/U1f1K, (5.8)
где: Ia – вектор тока, протекающего по обмотке А, А;
U1 – вектор питающего напряжения, В;
f1 –частота питающей сети, Гц;
ja –угол сдвига фаз между векторами Ia и U1;
K – коэффициент, от величины которого зависит геометрия магнитного поля в воздушном зазоре между статором и ротором (5.9).
K=wа/wб (5.9)
где: wa и wб –эффективное число витков в обмотках, соответственно, А и Б.
Величина емкости рабочего конденсатора выбрана правильно в том случае, если вращающееся магнитное поле – круговое. Это будет в том случае, если значение К максимально приблизится величине tgja.
Так как емкость Сраб обратно пропорциональна величине напряжения на обмотках статора, то чем выше напряжение, тем выгоднее использование КАД.
Пуск КАД
При пуске или торможении магнитное поле становится эллиптическим. Чтобы этого избежать, на время переходного процесса параллельно рабочему конденсатору подключают пусковой конденсатор Сп (см.рис.5.5, б), емкость которого в несколько раз больше рабочего:
Сп=(5….7)Сраб (5.10)
К достоинствам этого способа пуска относятся: высокий КПД; жесткость механических характеристик; двухзонное регулирование; высокий cosj1; возможность использования привода с КАД в технологиях с тяжелыми условиями пуска и торможения.
Недостатки: удорожание и увеличение габаритов, связаные с введением пускового конденсатора.
Этих недостатков лишен другой, менее применяемый из-за ухудшения пусковых и рабочих характеристик, способ пуска КАД. Двигатель включают в трехфазную сеть с нулевым проводом через автотрансформатор следующим образом (см.рис. 5.5):обмотку А включают на фазное напряжение Uab, обмотку Б – на линейное Uc. Сдвиг между их векторами на 90 электрических градусов обеспечивает автотрансформатор.
Рис 5.5
Реверс достигается изменением чередования фаз на одной из обмоток.







