Асинхронный двигатель состоит из следующих основных частей: вдвижной части - статора, вращающейся части - ротора, двух подшипниковых щитов, в которых помещаются на подшипниках концы ротора. В чугунный или алюминиевый корпус статора запрессовывается кольцеобразный сердечник, собранный из листов электротехнической стали, изолированных друг от друга лаком. Из таких стальных штампованных листов собирают цилиндр ротора, сердечники служат магнитопроводом. В пазах на статоре и роторе помещаются обмотки. Выполнение сердечников из листов уменьшает вихревые токи и нагрев. Обмотка статора выполняется в виде катушек из изолированного провода, уложенных в пазы, находящиеся на внутренней поверхности цилиндра статора. Шесть концов трехфазной обмотки статора выводятся в клемную коробку на корпусе двигателя и маркируются. Выведенные концы дают возможность соединить обмотку в звезду или треугольник. Короткозамкнутый ротор с обмоткой в виде беличьего колеса, выполняется из алюминиевых стержней с двумя торцевыми кольцами, закорачивающими их.
Каждый электродвигатель имеет металлическую пластинку (паспорт), на которой наносится тип электродвигателя, его мощность, напряжение питания, номинальный ток, скорость вращения, косинус фи, коэффициент полезного действия, вес и дата изготовления.
Принцип работы.
Поместим между полюсами магнита замкнутый виток, который может вращаться вокруг своей оси (рис. 20).
Если привести магнит во вращение, например по ходу часовой стрелки, то виток, укрепленный на оси, тоже придет в движение и начнет вращаться вслед за магнитом. Вращение витка обусловлено электромагнитными явлениями. При вращении магнита его силовые магнитные линии пересекают проводники витка, согласно закону электромагнитной индукции возникает ЭДС, направление которой можно определить по правилу правой руки, но с учетом 
 того, что в данномслучае движется не проводник, а магнитное поле относительно неподвижного проводника. Наведенная в проводниках ЭДС, создает замкнутомвитке ток, совпадающий по направлению с направлением ЭДС. Но так как проводники с током находятся в магнитном поле, то в результатевзаимодействия между ними и полем возникнут силы F, пропорциональные величине магнитной индукции поля и току в проводнике. Направление действия этих сил определяется по правилу правой руки.Пара сил создает вращающий момент, который придаст витку вращательное движение в направлении, совпадающем с направлением вращения магнита. Необходимо отметить, что вращение витка возможно только при наличии в нем тока, для чего виток должен быть обязательно замкнут. Если же виток разомкнут, то вращение не будет, как при этом отсутствуют силы, создающие вращение. В процессе вращения виток не может догнать вращающийся магнит и его скорость будет несколько меньше скорости магнита, потому что если скорости сравняются ЭДС и ток уменьшатся до нуля, вследствие чего момент сил тоже будет равен нулю.
того, что в данномслучае движется не проводник, а магнитное поле относительно неподвижного проводника. Наведенная в проводниках ЭДС, создает замкнутомвитке ток, совпадающий по направлению с направлением ЭДС. Но так как проводники с током находятся в магнитном поле, то в результатевзаимодействия между ними и полем возникнут силы F, пропорциональные величине магнитной индукции поля и току в проводнике. Направление действия этих сил определяется по правилу правой руки.Пара сил создает вращающий момент, который придаст витку вращательное движение в направлении, совпадающем с направлением вращения магнита. Необходимо отметить, что вращение витка возможно только при наличии в нем тока, для чего виток должен быть обязательно замкнут. Если же виток разомкнут, то вращение не будет, как при этом отсутствуют силы, создающие вращение. В процессе вращения виток не может догнать вращающийся магнит и его скорость будет несколько меньше скорости магнита, потому что если скорости сравняются ЭДС и ток уменьшатся до нуля, вследствие чего момент сил тоже будет равен нулю.
B трехфазном электрическом двигателе роль вращающегося магнита выполняет вращающееся магнитное поле, которое получается при подключении сдвинутых на 120 градусов обмоток статора к трехфазной электрической сети.
Способы регулирования скорости вращения электродвигателей переменного тока.
Регулирование скорости вращения асинхронных двигателей производят несколькими способами.

S-скольжение;
f-частота;
p-число пар полюсов.
Формула скорости вращения асинхронных двигателей показывает, что скорость вращения можно регулировать изменением частоты, числа пар полюсов, скольжения.
Регулирование скорости вращения изменением величины скольжения асинхронного двигателя возможно двумя способами:
введением в цепь ротора дополнительного сопротивления или дросселя, что возможно для двигателей с фазным ротором;
изменение реактивных сопротивлений (дросселей) включаемых в цепь обмотки статора.
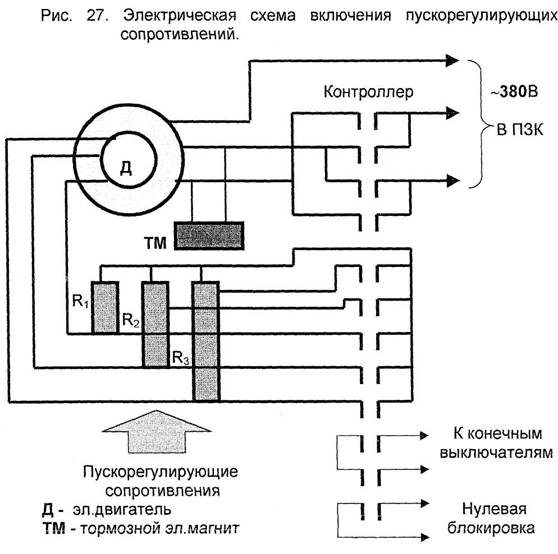
Регулирование скорости асинхронных электродвигателей с фазным ротором введением в цепь обмотки ротора дополнительного сопротивления (рис. 27) позволяет уменьшить его скорость не более чем 40-50% номинальной скорости. При таком регулировании с увеличением сопротивления увеличивается величина скольжения, т.е. уменьшается число оборотов двигателя. Данное регулирование приводит к неустойчивой работе на малых оборотах. Кроме этого, этот способ малоэкономичен, так как увеличивает потери в роторной цепи. Этот способ применяется в тех случаях, когда работа электродвигателя с пониженной скоростью непродолжительна и не требуется большой точности регулирования, например для грузоподъемных кранов. Регулирование осуществляется ступенчато.
Включение дросселей в цепь ротора позволяет более плавно осуществлять регулирование, позволяет почти в два раза снизить пусковые токи и производить реверсирование без боязни повредить обмотки от больших токов.
Регулирование скорости вращения асинхронных двигателей при помощи дросселей насыщения состоит в том, что в цепь статора двигателя включается реактивное сопротивление с переменной индуктивностью, что осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями. Это позволяет получить на зажимах электродвигателя различные напряжения, чем достигается изменение скольжения, т.е. скорости вращения ротора. Достоинство - плавное регулирование, недостаток - уменьшение вращающего момента, коэффициента мощности и КПД электродвигателя.
Регулирование скорости вращения асинхронного электродвигателя за счет изменения числа пар полюсов осуществляется переключением обмотки статора и является ступенчатым. Для этой цели применяются специальные многоскоростные двигатели, выпускаемые промышленностью и рассчитанные на 2, 3 и 4 скорости. Изменение числа пар полюсов достигают наиболее простым способом при устройстве двух независимых обмоток на статоре электродвигателя, а также с возможностью переключения каждой обмотки в отдельности. При переключениях необходимо сохранять направление вращения двигателя. Вследствие ухудшения условий охлаждения с уменьшением скорости вращения при увеличении числа пар полюсов приходится ограничивать ток обмотки статора.
Регулирование скорости вращения асинхронного двигателя изменением частоты тока требует специального источника переменного тока с изменяемой частотой.
При изменении частоты питающей сети для сохранения момента двигателя необходимо изменять и подводимое напряжение обмотки статора. Регулирование необходимо вести таким образом, чтобы магнитный поток двигателя оставался неизменным, и напряжение менялось пропорционально частоте. Для этих целей разработаны и применяются специальные преобразователи с регулированием частоты напряжения (рис. 28).
В преобразователях реализовано частотное управление асинхронным двигателем с короткозамкнутым ротором, заключающееся во взаимосвязанном регулировании частоты и напряжения.
Преобразователи обеспечивают все виды защит от аварийных режимов, ручное и автоматическое регулирование.
К силовой части относятся:
· В - силовой полупроводниковый выпрямитель.
· ФС - фильтр силовой, осуществляющий сглаживание пульсаций тока.
· U, I - датчики напряжения и тока.
· АИН - трехфазный мостовой транзисторный автономный инвертор напряжения с широтно-импульсной модуляцией, осуществляющий преобразование постоянного (выпрямленного) напряжения в переменное, требуемой частоты и амплитуды.
· АД - асинхронный двигатель.

Система управления включает в себя:
· ИП - источник питания устройств управления, регулирования и защиты.
· МСУ - микропроцессорный контроллер с устройством сопряжения, осуществляющий формирование управляющих сигналов по закону широтно-импульсного регулирования, а также тиристорами выпрямителя.
· ФИ - формирователь импульсов управления транзисторами АИН.
· УЗ - устройство защиты, обеспечивающее отключение преобразователя при токах недопустимой перегрузки и короткого замыкания, недопустимого перенапряжения, а также при получении сигналов о нарушении технологических режимов.
Применение преобразователей, особенно на насосном и вентиляторном оборудовании, позволяет получить значительную экономию электрической энергии. Также преобразователи успешно могут заменить электрические двигатели постоянного тока, которые на порядок дороже аналогичных по мощности асинхронных двигателей.






