Для анализа АСР регулирования давления в ресивере воспользуемся приложением Simulink специализированного программного продуктадля математического моделирования динамических систем MatLab. В соответствии с функциональной схемой на рис. 29 составим структурную схемуАСР.

Рисунок 36 – Структурно-математическая схема автоматизированной системы регулирования давления в ресивере
По исходным данным (технические характеристики средств автоматизации) для изучаемой системы автоматического регулирования давленияопределены передаточные функции исполнительного механизма и датчика, передаточная функция технологического объекта управления получена в результате идентификации (раздел 1.3.7):


 .
.
С помощью команды File/New/Model либо кнопки  на панели инструментовсоздаем новую модель. Далее из соответствующих разделов библиотекиSimulinkLibrary(рис.37) программыMatLabR2013b добавляем необходимые блоки для составления структурно-математической схемы, указав курсором требуемый блок и зажав на левую клавишу “мыши” перемещаем блок в созданное окно.
на панели инструментовсоздаем новую модель. Далее из соответствующих разделов библиотекиSimulinkLibrary(рис.37) программыMatLabR2013b добавляем необходимые блоки для составления структурно-математической схемы, указав курсором требуемый блок и зажав на левую клавишу “мыши” перемещаем блок в созданное окно.

Рисунок 37 – Открытие библиотеки блоков SimulinkLibrary
Соединив элементы АСР и изменив параметры динамических звеньев в соответствии со структурной схемой, показанной на рис. 36, получим структурно-математическую схему автоматизированной системы регулирования давления в ресивере в обозначениях Simulink.

Рисунок 38 – Структурно-математическая схема АСР давления в ресивере
Сохранить модель в буфере обмена для размещения в отчете или другом текстовом документе возможно, выполнив следующие действия: Edit/CopyCurrentViewtoClipboard/Metafile. Затем, сочетанием кнопок клавиатуры ctrl+V, вставляем модель в текстовый документ.
Построим переходную характеристику данной системы и определим показатели качества переходного процесса. Установив точки «отбора» сигнала в соответствии с рисунком 38, выполняем команду Run, для того чтобы запустить процесс моделирования. Покоманде Analysis/ControlDesign/LinearAnalysis (рис. 39)выводится рабочее окно с перечнем частотных и временных характеристик динамического объекта.

Рисунок 39 – Процедура построения характеристик САР
Важно помнить, что построение переходной характеристики осуществляется для системы, охваченной отрицательной обратной связью, а частотные характеристики строятся, когда обратная связь разорвана.
Для разрыва отрицательной обратной связи в модели перед осциллографом на линии связи вместо значка «выход»OutputMeasurement выбираем LinearAnalysisPoint /Open-loopOutput (рис. 40).

Рисунок40 – Окно Linear Analysis Tool
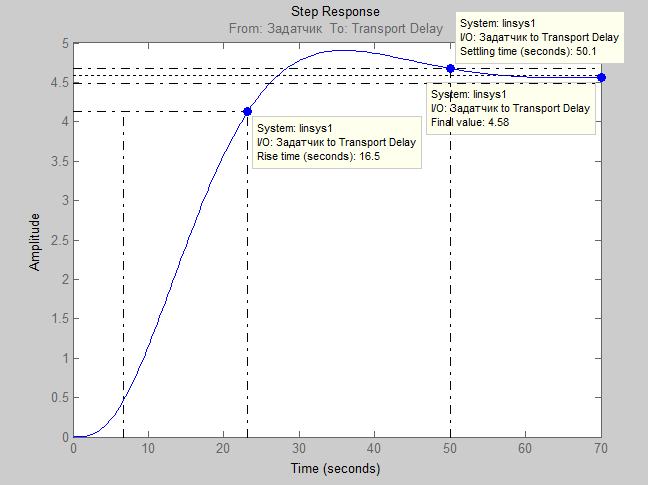
Рисунок 41 – Переходная характеристика АСР до оптимизации системы
Определим по переходной характеристике (рис. 41) значения показателей качества управления рассматриваемой модели АСР при подаче на вход единичного ступенчатого воздействия,полученные в результате моделирования:
- характер переходного процесса – монотонный апериодический;
- время нарастания (Risetime) – 16,5 с;
- время переходного процесса (Settingtime) – 50,1 с;
- установившееся значение выходной величины (Finalvalue) – 4,58;
- пиковая амплитуда (Peak amplitude) – 4,9;
- перерегулирование (Overshoot) – 7,02 %;
- абсолютное значение статической ошибки – 3,58.
Построение частотных характеристик ЛАХ, ЛФХ и АФЧХ происходит аналогично по вышеописанному алгоритму. Дополнительными показателями качества являются значения запасов устойчивости. Запасы устойчивости по фазе и по амплитуде для САР давления в ресивере оценим по логарифмическим частотным характеристикам (рис. 42 а).


а) б)
Рисунок 42–Частотные характеристики разомкнутой АСР давления:
а)логарифмические частотные характеристики; б) годограф Найквиста.
Приложение Simulink автоматически рассчитывает значения запасов устойчивости, которые для исследуемой САР составят:
- по амплитуде (GainMargin) – минус 0,23дБ;
- пофазе (Phase Margin) – минус0,98°;
- разомкнутая система не устойчива по критерию Найквиста.
Для обеспечения удовлетворительной работы АСР требуется привести систему к устойчивому состоянию, а также обеспечить запас по амплитуде не менее 10дБ и запас по фазе от 30 до 80 градусов, перерегулирование не более 10%, а абсолютное значение статической ошибки должно стремиться к нулю.
Амплитудно-фазовые характеристики (АФЧХ) разомкнутой САУ (рис.42 б) используются как для дополнительной оценки устойчивости САУ по частотному критерию Найквиста, так и для анализа запасов устойчивости, а именно чем больше значения  и
и  , тем дальше на комплексной плоскостиамплитудно-фазовая частотная характеристика расположена от точки (-1,j0).
, тем дальше на комплексной плоскостиамплитудно-фазовая частотная характеристика расположена от точки (-1,j0).
Выполнив анализ автоматизированной системы регулирования давления в ресивере, можно убедиться, что она не соответствует требованиям для удовлетворительной работы системы. Система не устойчива, присутствует большая статическая ошибка, перерегулирование, требуется обеспечить запас по амплитуде и уменьшить время переходного процесса.
Для обеспечения удовлетворительной работы АСР требуется, чтобы она обладала запасом устойчивости по амплитуде не менее 10дБ и запасом устойчивости по фазе от 30 до 80 градусов, перерегулирование должно быть не более 10%, а абсолютное значение статической ошибки должно стремиться к нулю.
Синтезрегулятора АСР
Задача синтеза регулятораАСР заключается в определении структуры и параметров управляющего устройства (регулятора), в виде математического описания для заданных объектов управления, требований к точности и качеству управления и условий работы, включая характеристики внешних воздействий, требования к надежности, весу, габаритам, потребляемой мощности и т.д.
Задача синтеза обычно является задачей нахождения оптимального значения выходного параметра, поскольку требуется создать устройство, наилучшим образом удовлетворяющее требованиям по устойчивости и качеству. Однако большое число требований и их разнообразие, как правило, не дают возможности объединить их в одном критерии оптимальности и решить задачу синтеза как математическую задачу на нахождение экстремума для этого критерия.
ПИД-регулятор относится к наиболее распространенному типу регуляторов. Более 90% устройств управления используют ПИД-закон регулирования, что объясняется его пригодностью для большинства практических задач [28]. Применительно к АСР нефтепереработки и нефтехимии ПИД-закон регулирования позволяет компенсировать колебания основных технологических параметров (расхода, концентрации, температуры, давления) более точно во всем диапазоне изменения рабочих характеристик аппаратов, установок и т.д. Недостатком ПИД-алгоритма является сложность настройки параметров, что объясняется чувствительностью САР к отклонению оптимума и невозможность реализации пошаговой настройки для получения заданного вида переходного процесса.
Выбор типа регулятора
В химической технологии широко распространены непрерывные законы регулирования: пропорциональный, пропорционально-интегральный, пропорционально-интегрально-дифференциальный. При выборе закона регулирования следует принимать во внимание следующие соображения [14, 28-32]:
1. П-регуляторы применяются для управления объектами с самовыравниванием (или устойчивый объект, если после кратковременного внешнего воздействия его состояние с течением времени возвращается в исходное состояние) или без самовыравнивания (к этой категории объектов управления относят как неустойчивые объекты, сигнал на выходе которых после окончания внешнего воздействия продолжает изменяться, удаляясь от первоначального состояния, так и нейтральные объекты, которые после окончания внешнего воздействия, стабилизируются в некотором состоянии равновесия, отличном от исходного) при небольших изменениях нагрузки, если технологическим регламентом допускается остаточное отклонение от заданного значения (статическая ошибка);
2. И-регуляторы нельзя использовать на объектах без самовыравнивания, т.к. система будет неустойчивой. Поскольку быстродействие И-регулятора невелико, самовыравнивание объекта должно быть значительным, запаздыванием небольшим, а изменения нагрузок плавными.
3. ПИ-регуляторы применяют для регулирования как устойчивых, так и нейтральных объектов при больших, но плавных изменениях нагрузок, когда требуется высокая точность регулирования в статическом режиме.
4. ПД-регуляторы и ПИД-регуляторы обеспечивают относительно высокое качество регулирования объектов, обладающих большим переходным запаздыванием (например, теплообменных и массообменных аппаратов), а также в тех случаях, когда нагрузка в объектах регулирования изменяется часто и быстро.
Таким образом, при выборе закона регулирования следует учитывать динамические свойства объекта управления, величину и характер возмущающих воздействий, а также заданный показатели качества управления. В соответствии с технологическими требованиями, в качестве заданного переходного процесса выбирают один из трех типовых:
· апериодический с минимальным временем переходного процесса  ;
;
· с 20%-ным перерегулированием и минимальным временем первого полупериода колебаний;
· с минимальным значением интеграла от квадрата ошибки  .
.
Переходный процесс в системе управления зависит от свойств химико-технологического объекта, от характера, величины и места приложения возмущающих воздействий, от закона регулирования и параметров регулятора.
Предварительным критерием выбора структуры управляющего устройства и закона регулирования может служить величина отношения времени запаздывания и постоянной времени объекта:  , где
, где  .– постоянная времени, характеризующая инерционность объекта управления. Для нейтральных объектов рассматривается соотношение
.– постоянная времени, характеризующая инерционность объекта управления. Для нейтральных объектов рассматривается соотношение  ,
,  – постоянная времени интегрирования объекта.
– постоянная времени интегрирования объекта.
В зависимости от значения величины  рекомендуется:
рекомендуется:
· если  , то удовлетворительное качество управления можно достигнуть, используя одноконтурную систему регулирования;
, то удовлетворительное качество управления можно достигнуть, используя одноконтурную систему регулирования;
· если  и в системе наблюдаются небольшие изменения нагрузок, то оптимальным будет применение регулятора релейного действия;
и в системе наблюдаются небольшие изменения нагрузок, то оптимальным будет применение регулятора релейного действия;
· если  , то лучшее качество регулирования обеспечивают регуляторы непрерывного действия, причем с ростом соотношения необходимо выбирать более сложные законы:
, то лучшее качество регулирования обеспечивают регуляторы непрерывного действия, причем с ростом соотношения необходимо выбирать более сложные законы:  .
.
· Если  , то следует использовать многоконтурные системы регулирования.
, то следует использовать многоконтурные системы регулирования.








