Для оптимизации параметров регулятора давления воспользуемся пакетом прикладных программ для построения систем управления CheckStepResponseCharacteristics, который реализует метод динамической оптимизации. Этот инструмент, строго говоря, представляющий собой набор блоков, разработанных для использования с SIMULINK, автоматически настраивает параметры моделируемых систем, основываясь на определённых пользователем ограничениях на их временные характеристики. Типовой сеанс в среде SIMULINK с использованием возможностей и блоков CheckStepResponseCharacteristics состоит из ряда стадий.
Очевидно, что статическую ошибку данной системы не получится устранить введением только регулятора, в связи с малым коэффициентом передачи датчика обратной связи. Необходимо, ввести последовательно с датчиком обратной связи звено, которое обеспечивало бы, коэффициент передачи по цепи обратной связи равный 1, т.е. установить нормирующий преобразователь (рис. 49) с передаточной функцией:
 .
.

Рисунок 49– Структурная схема автоматизированной системы регулирования давления с нормирующим преобразователем
Начальной стадией является создание модели исследуемой системы из стандартных блоков (рис. 50).

Рисунок 50 – Схема АСР для определения оптимальных параметров настройки ПИД – регулятора
Вызвав окно блока оптимизации CheckStepResponseCharacteristics, задаем необходимые параметры, подлежащие автоматической настройке (рис.51):
· перерегулирование (Overshoot) менее 10%;
· установившееся значение выходной величины (Finalvalue) 1.

Рисунок51 – Окно Check Step Response Characteristics
КнопкаShowPlotблока CheckStepResponseCharacteristicsвызывает допустимый коридор изменения выходного сигнала (рис. 52)в соответствии с установленными значениями показателей качества управления.

Рисунок 52 – Коридор параметров оптимизации
На структурной схеме АСР открывает окно настройки ПИД-регулятора и вводим символьные переменные Kp, Ki и Kd (рис.53).
В рабочем пространстве MATLAB указываем либо начальные настроечные коэффициенты, которые получили в результате предварительных расчетов (раздел 2.3.1), либо присваиваем всем коэффициентам значение 1:
>>kp=1
kp = 1
>>ki=1
ki = 1
>>kd=1
kd = 1

Рисунок 53 – Ввод символьных имен коэффициентов PID регулятора, подлежащих автоматической настройке
Далеепереходимнавкладку Response Optimization, открывокно Design Response Optimization изменюSink Block Parameters: Check Step Response Characteristics. ПоочередноимпортируемданныеизUsedBy, выделяяихиперемещаявнаборпеременныхдляоптимизацииCreateDesignVariablesset, спомощьюкнопки «стрелка» (рис.54).

Рисунок 54 – Ввод символьных имен коэффициентов, подлежащих автоматической настройке
По нажатию кнопки Optimize запускается процесс оптимизации. В случае, если вычислительный процесс сходится, т.е. система в соответствии с установленными показателями качества вычислила значения Kp, Ki и Kd, на экран выводится график переходного процесса в форме «коробочки Солодовникова» (рис.55).
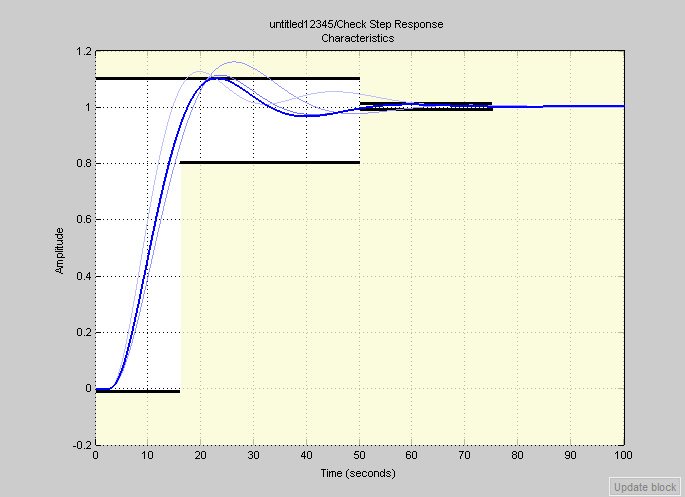
Рисунок 55 – График после оптимизации значений Kp, Ki и Kd
В итоге автоматического расчета в пакетеCheckStepResponseCharacteristicsоптимальные значения коэффициентов ПИД-регулятора (рис. 56) составили: Kp=1,5111, Ki=0,0143 и Kd=0,2724.

Рисунок 56 –Расчётные значения коэффициентов ПИД – регулятора
Для проверки полученных результатов синтеза регулятора системы автоматического регулирования давления в ресивере постоим график переходного процесса (рис. 57) и определим значения показателей качества, введя значения настроек каналов регулятора.
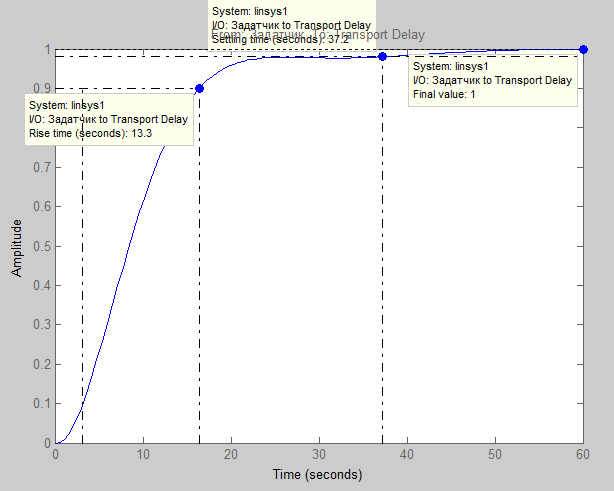
Рисунок 57 – Переходная характеристика АСР с настроенным ПИД-регулятором
Характеристики модели АСР с оптимальными значениями настроек ПИД- регулятором при подаче на вход единичнойступенчатой функции:
- время нарастания (Risetime) – 13,3 с.;
- время переходного процесса (Settingtime): 37,2 с.;
- установившееся значение выходной величины (Finalvalue): 1;
- ошибка регулирования Ε ст = 1 − 1 = 0;
- перерегулирование (Overshoot) составляет: 0%.
Для разомкнутой системы строим частотные характеристики: ЛАХ, ЛФХ (рис. 58) и АФХ (рис. 59).

Рисунок 58 – ЛАХ и ЛФХ характеристики АСР с настроенными значениями каналов ПИД-регулятора
Автоматически система определяет значения запасов устойчивости:
- поамплитуде (Gain Margin): 27,6дБ;
- по фазе (PhaseMargin): 72,7.

Рисунок 59 – АФХ характеристики АСР с настроенными значениями каналов ПИД-регулятора
ЗАКЛЮЧЕНИЕ
Основу теории автоматического управления составляют математические модели, отражающие взаимосвязь элементов систем автоматического управления друг с другом и с внешней средой. Построение моделей управления технологическими процессами и элементов систем управления возможно либо на основе теоретических исследований, либо путем эксперимента. Для большинства технологических объектов управления не получено достаточно достоверных моделей, что обосновывает актуальность автоматизированного решения проблем идентификации с использование специализированного ПО.
Изложенный в учебном пособии материал позволяет выполнитьэкспериментально-теоретической идентификацию (отождествления)структуры и параметров математической модели ТОУ, обеспечивающей близость выходных значений модели и объекта при наличии на входе одних и тех же входных сигналов. Используя встроенные инструменты SystemIdentificationToolbox приложения Simulink программного продукта MATLAB R2013b на примере объекта технологического управления для производство фенола, ацетона и каучука, выполнен сравнительный анализ различных статистических методов идентификации систем автоматического управления в динамическом режиме на основе процента адекватности.
Используя полученную математическую модель ТОУ решены задачи анализа и синтеза регулятора, т.е. обоснован выбор структуры и параметров управляющего устройства, при которых система автоматического управления удовлетворяет заданным требованиям к качеству. Предложенные в учебном пособии рекомендации к выбору закона регулирования и аналитическому расчету настроечных коэффициентов позволяют верифицировать рассчитанные программой значения.
Для расширенного изучения вопроса идентификации рекомендуется воспользоваться литературой, приведенной в списке литературы.
В качестве прикладной программы рекомендуется использовать пакетные приложения Simulink и SystemIdentificationToolbox программного продукта MATLAB R2013b.
В результате введения в систему ПИД - регулятора и расчета оптимальных значений параметров по различным методиками (приближенным аналитическим, экспериментальным и с помощью специализированного программного приложения SystemIdentificationToolbox пакета MATLAB R2013b.) были получены следующие показатели качества системы:
- время регулирования (Risetime) уменьшилось с 16,5 с до 13,3 с;
- время переходного процесса (Settingtime) уменьшилось с 50,1 с до 37,2 с;
- установившееся значение выходной величины (Finalvalue) изменилось с 4,58 до 1;
- перерегулирование (Overshoot) уменьшилось с 7,02 до 0%;
- абсолютное значение статическойошибки уменьшилась с 3,58 до 0;
- запас по амплитуде (GainMargin) увеличился с минус 0,23 до 27,6 дБ;
- запас по фазе (PhaseMargin) увеличился с минус 0,98° до 72,2°.
С учетом полученных численных значений критериев качества можно сделать вывод, о том, что выбранные настроечные коэффициенты и структура регулятора обеспечивают необходимые свойства АСР давления в ресивере.
Список литературы
1. Федеральный закон от 21.07.1997 N 116-ФЗ (ред. от 03.07.2016) "О промышленной безопасности опасных производственных объектов"
2.Руппель А-р.А., Руппель А.А., Пастухова Е.И., Щербаков В.С. Идентификация объектов автоматизации технологических процессов в среде MATLAB: Учебное пособие – Омск: Филиал ГОУ ВПО «Российский заочный институт текстильной и легкой промышленности» в г. Омске, 2009. – 74 с.
3. Руппель А.А. Анализ и синтез систем автоматизации технологических процессов: Учебное пособие. – Омск: Изд-во Сиб АДИ, 2007. – 86 с.
4. Евстафьев В.В., Енгибарян И.А., Сахаров И.А. Основы конструирования и технологии производства РЭС: учебное пособие по дисциплине «Основы конструирования и технологии производства РЭС» / В.В. Евстафьев, И.А. Енгибарян, И.А. Сахаров. ‒ М.: Издательский дом Академии Естествознания, 2016. – 92 с.
5. Вычислительные методы. Теория и практика в среде MATLAB. Для высших учебных заведений. Курс лекций / К.Э. Плохотников. – Издательство: Горячая Линия – Телеком, 2009. – 496 с.
6. Новиков, С. И. Практическая идентификация динамических характеристик объектов управления теплоэнергетического оборудования: Учеб. пособие – Новосибирск: Изд - во НГТУ, 2004. – 64 c.
7. Дрейзин В.Э. Управление качеством электронных средств: учебное пособие для студ. высш. учеб. заведений / В.Э. Дрейзин, А.В. Когура. – М.: Издательский центр «Академия», 2010. –288с.
8. Новиков, С. И. Оптимизация автоматических систем регулирования теплоэнергетического оборудования: учеб. пособие. – Новосибирск: Изд - во НГТУ, 2006. Ч.1. – 108 с.
9. Методы классической и современной теории автоматического управления: учебник в 5 тт. Т.4: Теория оптимизации автоматического управления / под ред. К. А. Пупкова и Н.Д. Егупова. М.: Изд-во МГТУ им. Н. Э. Баумана, 2004. – 744 с.
10. Balas, G.L. AnalysisandSynthesisToolbox – forusewithMATLAB / Balas, G.L. [andoth.] - MUSENandTheMathWorks, Inc..
11. Дудников, Е. Г. Основы автоматического регулирования тепловых процессов / Е. Г. Дудников - М.: госэнергоиздат., 1956. – 264 с.
12. Ротач, В. Я. Теория автоматического управления: Учебник для вузов. – 3 - еизд.,М.: ИздательствоМЭИ, 2005. – 400 с.
13. Astrom K. J. Advanced PID control/ K. J. Astrom, T. Hagglund – ISA (The instrumentation, Systems, and Automation Society), 2006 – 460 с.
14. Беспалов А.В., Харитонов Н.И. Системы управления химико-технологическими процессами: Учебник для вузов. М.: ИКЦ "Академкнига", 2005. - 307 с.
15. Раппопорт Э. Я. Аналитическое конструирование агрегированных регуляторов в системах с распределенными параметрами // Изв. РАН. Теория и системы управления, 2012. – № 3. – С. 38 – 54.
16. Хлебников, М. В. Оптимизация линейных систем при ограниченных внешних возмущениях (техника инвариантных эллипсоидов) / М. В. Хлебников, Б. Е. Поляк, В. М. Кунцевич// Автоматика и телемеханика, 2011. – № 11. – С. 9 – 59.
17. Летов, А. М. Динамика полета и управление / А. М. Летов. М.: Наука, 1969. – 360 с.
18. Бараксанов, Ю. П. ПИД - регуляторы в системах автоматического регулирования/ Ю. П. Бараксанов, Н. Н. Попов // пособие для курсов.
19. Потрнягин, Л.С. Математическая теория оптимальных процессов / Л. С. Потрнягин. М.: Наука, 1969. – 384 с.
20. Пупков, К. А. Синтез оптимального управления динамическим объектом со случайными начальными значениями / К. А. Пупков, С. Ф. Фам, А. И. Дивеев// Наука и образование, 2012. –№ 3. http://technomag.edu.ru/doc/376455.html
21. Синергетические методы управления сложными системами: механические и электромеханические системы / под общ. Ред. А. А. Колесникова. М.: КомКнига, 2006. –304 с.
22. Современная прикладная теория управления: синергетический подход в теории управления // под ред. А. А. Колесникова. Ч. II. Таганрог: Изд-во ТРГУ, 2000. – 559 с.
23. Дивеев, А. И. Численный метод сетевого оператора для синтеза системы управления с неопределенными начальными значениями // Изв. РАН. Теория и системы управления, 2012. – № 2. – С. 63 – 78.
24. Соболь, И. М. Выбор оптимальных параметров в задачах со многими критериями: учебное пособие для вузов. // И.М. Соболь, Р.Б. Статников // М.: Дрофа, 2006. – 175 с.
25. Кузнецова, О. А. Адаптивный метод исследования пространства параметров. Тула: Изд-во Тул-ГУ, 2012. – 288 с.
26. Сушкин В. А. Применение многокритериальной оптимизации на основе точек Соболя // Сб. научных трудов SWorld по материалам международной научно-практ. конф. Одесса: КУПРИЕНКО, 2013. Т.9. – Вып. 1. – С. 19 – 21.
27. Грязев М. В. Применение ЛПt - последовательности при оптимизации динамического объекта / М. В. Грязев, О. А. Кузнецова // Изв. ТулГУ. Естественные науки, 2013. – Вып. 1. – С. 142 – 153.
28. Денисенко, В. ПИД –регуляторы: принципы построения и модификации. Ч.1.//Современные технологии автоматизации. –2006. -№ 4. –с. 66-74.
29. Денисенко, В. ПИД – регуляторы: принципы построения и модификации. Ч. 2.//Современные технологии автоматизации. – 2007. - № 1. – с. 78 - 88.
30. Денисенко, В. ПИД – регуляторы: вопросы реализации. Ч. 1.//Современные технологии автоматизации. – 2007. - № 4. – с. 86 - 97.
31. Денисенко, В. ПИД – регуляторы: вопросы реализации. Ч. 2.//Современные технологии автоматизации. – 2008. - № 1. – с. 86 - 97.
32. Increasing Customer Value of Industrial Control Performance Monitoring- Honeywell’s Experience/ Lane Desborough1 and Randy Miller, Honeywell Hi-Spec
Solutions -ThousandOaks, CA 91320.
33. Штейнберг, Ш. Е. Проблемы создания и эксплуатации эффективных систем регулирования/ Ш. Е. Штейнберг и др. // АСУ для промышленных предприятий. – 2007. - № 7 – С. 1 - 5.
34. Писарев, А. В. Сравнительные исследования расчётных методов определения параметров настроек промышленных ПИД – регуляторов/ А. В. Писарев, С. И. Новиков //Энергетика и теплотехника. Сборник научных трудов. Вып. 11. - НГТУ, 2007. - с. 191 – 200.
35. Wen. Tan. Comparison of some well - known PID tuning formulas/ Wen. Tan. Jizhen Liu, Tongwen Chen, Horacio. J. Marquez // Computers and Chemical Engineering. - 2006. - № 30. – p. 1416 - 1423.
36. Давыдов, Н. И. Определение параметров настройки ПИД – регулятора по переходной характеристике объекта управления/ Н. И. Давыдов, О. М. Идз он, О. В. Симонова // Теплоэнергетика. - 1995. - № 10. - с. 17 - 22.
37. Astrom K. J. Revisiting the Ziegler - Nichols step response method for PID control/ K. J. Astrom, T. Hagglund // Journal of Process Control - 2004. - № 4 -p.635 - 650. 38. Смирнов, Н. И. О корректности настройки ПИ Д - регулятора при аппроксимации переходной характеристики объекта регулирования апериодическим звеном с транспортным запаздыванием./ Н. И. Смирнов, В. Р. Сабанин, А. И. Репин // Промышленные АСУ и контроллеры – 2007. - № 1 – С. 35 - 39.





