СИНТЕЗ РЕГУЛЯТОРОВ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОПАСНЫМИ ПРОИЗВОДСТВАМИ
Учебное пособие
Омск
Издательство ОмГТУ
Составители: Гебель Е.С., Пастухова Е.И.
Учебное пособие предназначено для магистров направления подготовки магистратуры 15.04.04 «Автоматизация технологических процессов и производств» для изучения дисциплины «Теория автоматизации технологических процессов и производств».
Изложенный в учебном пособии материал позволит сформировать знания о современных методах и средствах, используемых при создании автоматизированных систем управления технологическими процессами опасных производств.
Содержит краткое описание теоретического материала, алгоритм решения задач анализа и синтеза систем управления. Выполнение практического задания сопровождает теоретический материал.
Печатается по решению редакционно-издательского совета
Омского государственного технического университета
Оглавление
ВВЕДЕНИЕ.. 4
Глава 1. Идентификация технологических объектов управления. 6
1.1 Классификация опасных производственных объектов. 6
1.2. Идентификация параметров технологического объекта управления. 9
1.2.1. Экспериментальное определение динамических свойств объектов. 11
1.2.1.1. Снятие переходной характеристики (кривой разгона) 11
1.2.1.2 Снятие импульсной переходной характеристики. 12
1.2.2. Идентификация технологического объекта средствами пакета Simulink. 19
1.2.2.1 Создание файла данных и их предварительная обработка. 19
1.2.2.2 Оценка адекватности модели объекта управления. 26
1.2.2.3 Определение передаточных функций непрерывной и дискретной моделей ТОУ.. 29
1.2.2.4 Анализ технологического объекта управления. 30
1.2.3 Аппроксимация модели по переходной характеристике. 36
1.2.3.1. Аппроксимация модели объекта в виде n последовательных звеньев. 38
1.2.3.2. Аппроксимация модели методом В. Я. Ротача. 43
Глава 2. Синтез регулятора системы автоматического управления. 50
2.1 Задача синтеза регуляторов. 53
2.2 Анализ системы регулирования давления в ресивере. 55
2.3 Синтез регулятора АСР. 60
2.3.1 Выбор типа регулятора. 60
2.3.2. Аналитическая настройка каналов регулирования. 62
2.3.3. Настройка каналов регулирования для обеспечения заданных значений запасов устойчивости 66
2.3.4. Синтез регуляторов для технологических объектов с большим запаздыванием.. 70
2.3.5. Автоматизированный расчет настроечных коэффициентов регулятора средствами SIMULINK 73
ЗАКЛЮЧЕНИЕ.. 80
Список литературы.. 82
ВВЕДЕНИЕ
Учебное пособие разработано в соответствии с рабочей программой дисциплины «Теория автоматизации технологических процессов и производств»,являющейся одной из основных при подготовке магистров по направлению 15.04.04 «Автоматизация технологических процессов и производств».
Проектирование системы автоматического управления технологическим объектом или процессом (машины, аппарата, установки, технологической линии и т.п.) заключается в подборе необходимых средств автоматизации, составлении структурной схемы, выборе и расчете передаточных функций звеньев системы. В качестве математических моделей проектируемых систем обычно используют стандартизованные средства автоматизации с известными параметрами передаточных функций. Однако для реальной технологической установки, например ректификационной колонны, скруббера, реактора и др., передаточная функция обычно либо совсем не известна (не входит в номенклатуру технических данных технологического оборудования), либо не известны значения ее параметров. Таким образом, актуальность решения задач идентификации моделейтехнологических объектов управления и синтеза регулирующих устройств является актуальной проблемой.
Особую группу технологических объектов управления (ТОУ) составляют опасные производственные объекты, классификация которых в соответствии с Федеральным законом от 21.07.1997 N 116-ФЗ "О промышленной безопасности опасных производственных объектов" представлена в первом разделе. На конкретном примере, а именно автоматизированной системе управления технологическим процессом производства фенола и ацетона, описан процесс идентификации технологического объекта управления, который включает этап проведения эксперимента, экстраполяции (сглаживания временных рядов для элиминирования случайных колебаний) численных значений входных и выходных сигналов и сравнительный анализ моделей по имеющимся экспериментальным данным. Алгоритм идентификации реализован с применением программного продукта MATLABR2013b пакета SystemIdentificationToolbox.
Нетривиальной задачей при проектировании САР основных технологических параметров (расхода, давления, температуры, концентрации) является настройка устройства управления (регулятора), реализующего ПИД-закон регулирования в связи с чувствительностью таких систем к отклонению от оптимальных значений и отсутствием возможности раздельной настройки каналов управления.Кроме того требования к переходным и установившимся режимам работы, как правило, носят противоречивый характер, таким образом, синтез настроек ПИД – регулятора в системах автоматического управления является задачей многокритериальной оптимизации. Во втором разделе учебного пособия описаны методы структурного и параметрического синтеза регулятора с учетом принятых в нефтепереработке и нефтехимии значений показателей критериев качества. Апробация рассмотренных методик выполнена на примере контура регулирования давления на выходе ресивера, в соответствии с полученной в первой главе расчетной моделью технологического объекта управления.
Sample time: 3 seconds
Outputs Unit (if specified)
y1
Inputs Unit (if specified)
u1
Автоматически сформированный отчет (рис. 8)указывает, что файл содержит результаты 100 измерений с интервалом дискретизации 3 с. Входными переменными является массив значений u1, а выходным параметром – y1.
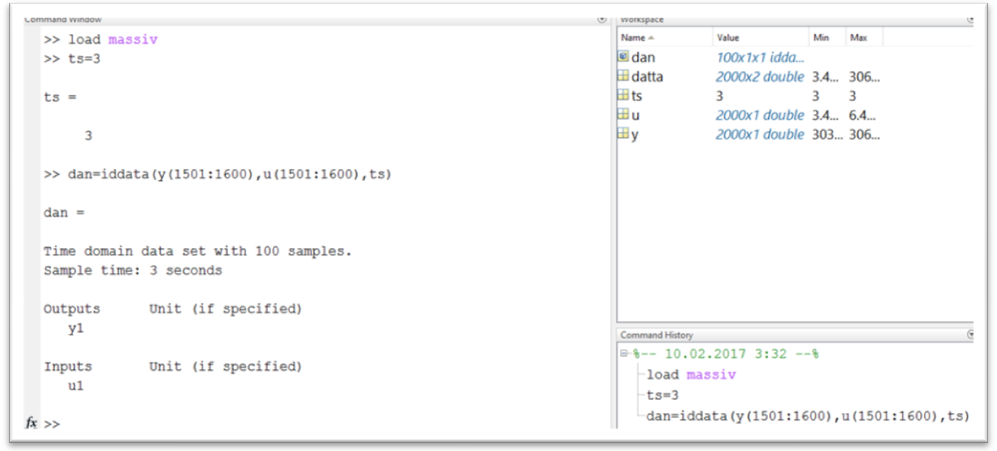
Рисунок 8 – Объединение исходных данных в единый файл
Если запись команд осуществляется в командном режимеCommandWindow, то после перезагрузки программы команды сохранены не будут. История команд сохраняется в CommandHistory, которая видна и после перезагрузки.
В рабочей области Workspaseна начальном этапе будут отображены папки с массивами значений входных и выходных параметров и шаг дискретизации, затем появится наиболее адекватная модель ТОУ.
Указав курсором область Workspaseи нажав на левую клавишу кнопку мыши, на экран выводятся значения параметров u, y, t или весь массив данных data (рис.9).
Для создания или добавления текстовых надписей, в частности обозначений входных и выходных величин исследуемого ТОУ, используется следующая команда:
>>set(dan,'inputname','Расход','outputname', 'Давление')
Размерности входного и выходного сигнала введем с помощью команды:
>>set(dan,'InputUnit','м3/ч','OutputUnit','Па')

Рисунок 9 – Значения элементов массива данных из области Workspase
Полная информация о файле исходных данных dan формируется при вызове команды:
>>get(dan)
ans =
Domain: 'Time'
Name: ''
OutputData: [100x1 double]
y: 'Same as OutputData'
OutputName: {'Давление'}
OutputUnit: {'Па'}
InputData: [100x1 double]
u: 'Same as InputData'
InputName: {'Расход'}
InputUnit: {'м3/ч'}
Period: Inf
InterSample: 'zoh'
Ts: 3
Tstart: []
SamplingInstants: [100x0 double]
TimeUnit: 'seconds'
ExperimentName: 'Exp1'
Notes: {}
UserData: []
Для графического преставления исходных данных используется команда:
>>plot(dan)
Временные диаграммы изменения входного и выходного сигналов(расхода и давления, соответственно) показаны на рис.10. Интервал наблюдения300 с, приведенырезультаты 100 экспериментов с шагом дискретизации 3 с.

Рисунок10– Временные диаграммы входного и выходного сигналов, построенные в пакете Simulink
Для добавления графиков в текстовый документ (отчет, пояснительная записка и т.д.) необходимо выполнить в окне Figure1 команду Edit\ CopyFigure (рис. 11).

Рисунок 11–Копирование временных диаграмм сигналов
Для вызова рабочего окна пакета SystemIdentificationToolbox MATLAB (рис. 12) необходимо выполнить командуident:
>>ident

Рисунок12–Диалоговоеокнопакета System Identification Toolbox
Для загрузки исходных данных для процесса идентификации модели в диалоговом окнеSystemIdentificationToolbox необходимо выбрать в раскрывающемся списке ImportdataзначениеDataobject. В результате выполнения команды откроется окно ImportData, показанное на рис. 13.

Рисунок 13 – Окно ImportData
Воткрывшемся окне в разделе DataFormatforSignalsиз контектсного меню выбираем значениеIDDATAorIDFRD/FRD. В разделеWorkspaceVariable в полеObjectвводим имя файла данных dan. В результате нажатия клавиши Import в разделе DataInformationавтоматически установятся следующие параметры: Dataname, Startingtime, Samplinginterval.
Для получения расширенного списка сведений об импортируемых данных необходимо нажать на кнопку More в поле окна DataInformation, после чего появятся дополнительные разделы InputProperties, ChannelNames, PhysicalUnitsofVariables (рис. 14).

Рисунок 14 – Информация об импортируемых данных
Для предварительной обработки данныхв контекстном менюPreprocessнеобходимо выбратьрежимбыстрого старта Quickstart (рис. 15).В результате будут дополнительносформированы следующие файлы исходных данных:
· файл dandсодержит данных с удаленным трендом;
· файл dandeсодержит усеченные данные;
· файл dandv содержит часть данных из начального диапазона, которые будут использованы для проверки модели.

Рисунок 15 – Предварительная обработка данных
Sample time: 3 sekonds
Задача синтеза регуляторов
При исследовании системы автоматического управления обычно решают одну из следующих задач: синтеза или анализа. При анализе структура и параметры САУ известны, требуется определить поведение в заданных условиях. Во втором случае, для заданного объекта управления требуется построить управляющее устройство, которое обеспечит требуемые значения показателей качества.
В задачу синтеза входит выбор структуры и параметров управляющего устройства (регулятора), при которых САУ будет устойчива, иметь необходимую точность воспроизведения задающего воздействия и качество переходного процесса.
Основными этапами решения задачи синтеза управляющих устройств являются:
1. формулировка технического задания на проектирование на основе анализа возможных режимов САУ (установившихся и переходных), возмущающихся воздействий, необходимой точности, ограничений на управляющие и регулируемые параметры, времени работы и др. Разрабатывается функциональная схема САУ, выбирается тип исполнительных, усилительных, измерительных устройств, вид используемой энергии и т.д.
2. проектируется структура управляющего устройства на основе следующих требований к качеству:
· статическая ошибка при подаче на вход САУ единичного ступенчатого воздействия не должна превышать допустимого значения или быть равной нулю;
· максимальное перерегулирование  в системе не должно превышать допускаемого перерегулирования
в системе не должно превышать допускаемого перерегулирования  ;
;
· время переходного процесса  не должно превышать допускаемого значения;
не должно превышать допускаемого значения;
· максимальное ускорение выходной переменной при заданных условиях не должно превышать допустимого значения и т.д.
Область допустимых значений прямых показателей качества регулирования для наглядности представляют в виде «коробочки Солодовникова» [14] (рис. 34).

Рисунок 34 – Область допустимых значений показателей переходной характеристики [14]
3. Рассчитываются параметры управляющего устройства, используя либо методы, направленные на обеспечение требований к качеству регулирования, либо метод подбора, при котором оператор системы должен как можно точнее соответствовать желаемому оператору.
4. Анализ устойчивости САУ с учетом вычисленных на шаге 3 значений параметров регулятора и проверка соответствия скорректированной системы требованиям, сформулированным в техническом задании. В случае не удовлетворительного результата, возвращаемся ко второму и третьему шагу.
5. Аппаратная реализация устройства управления, т.е. разработка принципиальной схемы в соответствии с выбранной структурой и рассчитанными параметрами.
6. Испытания синтезированной САУ.
На рисунке 35 показаны переходные характеристики некоторого технологического объекта (О) и систем регулирования, построенных на его основе и реализующих один из типовых алгоритмов регулирования (П, И, ПИ, ПД, ПИД). Диаграммы изменения выходного сигнала получены в ответ на единичное ступенчатое воздействие, настройки каналов регулирования назначались таким образом, чтобы обеспечить одинаковый запас устойчивости.

Рисунок 35 – Переходные процессы в объекте и в системе объект - регулятор
По результатам анализа графиков переходных характеристик следуетотметить, что:
· наибольшее время переходного процесса и перерегулирование наблюдается в системе с И-регулятором;
· наименьшее время переходного процесса в системах с П- и ПД-регулятором, но в обоих случаях присутствует статическая ошибка;
· время переходного процесса и перерегулирование в системе с ПИ-регулятором оказываются больше, чем с ПИД-регулятором на 25-30%.
Синтезрегулятора АСР
Задача синтеза регулятораАСР заключается в определении структуры и параметров управляющего устройства (регулятора), в виде математического описания для заданных объектов управления, требований к точности и качеству управления и условий работы, включая характеристики внешних воздействий, требования к надежности, весу, габаритам, потребляемой мощности и т.д.
Задача синтеза обычно является задачей нахождения оптимального значения выходного параметра, поскольку требуется создать устройство, наилучшим образом удовлетворяющее требованиям по устойчивости и качеству. Однако большое число требований и их разнообразие, как правило, не дают возможности объединить их в одном критерии оптимальности и решить задачу синтеза как математическую задачу на нахождение экстремума для этого критерия.
ПИД-регулятор относится к наиболее распространенному типу регуляторов. Более 90% устройств управления используют ПИД-закон регулирования, что объясняется его пригодностью для большинства практических задач [28]. Применительно к АСР нефтепереработки и нефтехимии ПИД-закон регулирования позволяет компенсировать колебания основных технологических параметров (расхода, концентрации, температуры, давления) более точно во всем диапазоне изменения рабочих характеристик аппаратов, установок и т.д. Недостатком ПИД-алгоритма является сложность настройки параметров, что объясняется чувствительностью САР к отклонению оптимума и невозможность реализации пошаговой настройки для получения заданного вида переходного процесса.
Выбор типа регулятора
В химической технологии широко распространены непрерывные законы регулирования: пропорциональный, пропорционально-интегральный, пропорционально-интегрально-дифференциальный. При выборе закона регулирования следует принимать во внимание следующие соображения [14, 28-32]:
1. П-регуляторы применяются для управления объектами с самовыравниванием (или устойчивый объект, если после кратковременного внешнего воздействия его состояние с течением времени возвращается в исходное состояние) или без самовыравнивания (к этой категории объектов управления относят как неустойчивые объекты, сигнал на выходе которых после окончания внешнего воздействия продолжает изменяться, удаляясь от первоначального состояния, так и нейтральные объекты, которые после окончания внешнего воздействия, стабилизируются в некотором состоянии равновесия, отличном от исходного) при небольших изменениях нагрузки, если технологическим регламентом допускается остаточное отклонение от заданного значения (статическая ошибка);
2. И-регуляторы нельзя использовать на объектах без самовыравнивания, т.к. система будет неустойчивой. Поскольку быстродействие И-регулятора невелико, самовыравнивание объекта должно быть значительным, запаздыванием небольшим, а изменения нагрузок плавными.
3. ПИ-регуляторы применяют для регулирования как устойчивых, так и нейтральных объектов при больших, но плавных изменениях нагрузок, когда требуется высокая точность регулирования в статическом режиме.
4. ПД-регуляторы и ПИД-регуляторы обеспечивают относительно высокое качество регулирования объектов, обладающих большим переходным запаздыванием (например, теплообменных и массообменных аппаратов), а также в тех случаях, когда нагрузка в объектах регулирования изменяется часто и быстро.
Таким образом, при выборе закона регулирования следует учитывать динамические свойства объекта управления, величину и характер возмущающих воздействий, а также заданный показатели качества управления. В соответствии с технологическими требованиями, в качестве заданного переходного процесса выбирают один из трех типовых:
· апериодический с минимальным временем переходного процесса  ;
;
· с 20%-ным перерегулированием и минимальным временем первого полупериода колебаний;
· с минимальным значением интеграла от квадрата ошибки  .
.
Переходный процесс в системе управления зависит от свойств химико-технологического объекта, от характера, величины и места приложения возмущающих воздействий, от закона регулирования и параметров регулятора.
Предварительным критерием выбора структуры управляющего устройства и закона регулирования может служить величина отношения времени запаздывания и постоянной времени объекта:  , где
, где  .– постоянная времени, характеризующая инерционность объекта управления. Для нейтральных объектов рассматривается соотношение
.– постоянная времени, характеризующая инерционность объекта управления. Для нейтральных объектов рассматривается соотношение  ,
,  – постоянная времени интегрирования объекта.
– постоянная времени интегрирования объекта.
В зависимости от значения величины  рекомендуется:
рекомендуется:
· если  , то удовлетворительное качество управления можно достигнуть, используя одноконтурную систему регулирования;
, то удовлетворительное качество управления можно достигнуть, используя одноконтурную систему регулирования;
· если  и в системе наблюдаются небольшие изменения нагрузок, то оптимальным будет применение регулятора релейного действия;
и в системе наблюдаются небольшие изменения нагрузок, то оптимальным будет применение регулятора релейного действия;
· если  , то лучшее качество регулирования обеспечивают регуляторы непрерывного действия, причем с ростом соотношения необходимо выбирать более сложные законы:
, то лучшее качество регулирования обеспечивают регуляторы непрерывного действия, причем с ростом соотношения необходимо выбирать более сложные законы:  .
.
· Если  , то следует использовать многоконтурные системы регулирования.
, то следует использовать многоконтурные системы регулирования.
Список литературы
1. Федеральный закон от 21.07.1997 N 116-ФЗ (ред. от 03.07.2016) "О промышленной безопасности опасных производственных объектов"
2.Руппель А-р.А., Руппель А.А., Пастухова Е.И., Щербаков В.С. Идентификация объектов автоматизации технологических процессов в среде MATLAB: Учебное пособие – Омск: Филиал ГОУ ВПО «Российский заочный институт текстильной и легкой промышленности» в г. Омске, 2009. – 74 с.
3. Руппель А.А. Анализ и синтез систем автоматизации технологических процессов: Учебное пособие. – Омск: Изд-во Сиб АДИ, 2007. – 86 с.
4. Евстафьев В.В., Енгибарян И.А., Сахаров И.А. Основы конструирования и технологии производства РЭС: учебное пособие по дисциплине «Основы конструирования и технологии производства РЭС» / В.В. Евстафьев, И.А. Енгибарян, И.А. Сахаров. ‒ М.: Издательский дом Академии Естествознания, 2016. – 92 с.
5. Вычислительные методы. Теория и практика в среде MATLAB. Для высших учебных заведений. Курс лекций / К.Э. Плохотников. – Издательство: Горячая Линия – Телеком, 2009. – 496 с.
6. Новиков, С. И. Практическая идентификация динамических характеристик объектов управления теплоэнергетического оборудования: Учеб. пособие – Новосибирск: Изд - во НГТУ, 2004. – 64 c.
7. Дрейзин В.Э. Управление качеством электронных средств: учебное пособие для студ. высш. учеб. заведений / В.Э. Дрейзин, А.В. Когура. – М.: Издательский центр «Академия», 2010. –288с.
8. Новиков, С. И. Оптимизация автоматических систем регулирования теплоэнергетического оборудования: учеб. пособие. – Новосибирск: Изд - во НГТУ, 2006. Ч.1. – 108 с.
9. Методы классической и современной теории автоматического управления: учебник в 5 тт. Т.4: Теория оптимизации автоматического управления / под ред. К. А. Пупкова и Н.Д. Егупова. М.: Изд-во МГТУ им. Н. Э. Баумана, 2004. – 744 с.
10. Balas, G.L. AnalysisandSynthesisToolbox – forusewithMATLAB / Balas, G.L. [andoth.] - MUSENandTheMathWorks, Inc..
11. Дудников, Е. Г. Основы автоматического регулирования тепловых процессов / Е. Г. Дудников - М.: госэнергоиздат., 1956. – 264 с.
12. Ротач, В. Я. Теория автоматического управления: Учебник для вузов. – 3 - еизд.,М.: ИздательствоМЭИ, 2005. – 400 с.
13. Astrom K. J. Advanced PID control/ K. J. Astrom, T. Hagglund – ISA (The instrumentation, Systems, and Automation Society), 2006 – 460 с.
14. Беспалов А.В., Харитонов Н.И. Системы управления химико-технологическими процессами: Учебник для вузов. М.: ИКЦ "Академкнига", 2005. - 307 с.
15. Раппопорт Э. Я. Аналитическое конструирование агрегированных регуляторов в системах с распределенными параметрами // Изв. РАН. Теория и системы управления, 2012. – № 3. – С. 38 – 54.
16. Хлебников, М. В. Оптимизация линейных систем при ограниченных внешних возмущениях (техника инвариантных эллипсоидов) / М. В. Хлебников, Б. Е. Поляк, В. М. Кунцевич// Автоматика и телемеханика, 2011. – № 11. – С. 9 – 59.
17. Летов, А. М. Динамика полета и управление / А. М. Летов. М.: Наука, 1969. – 360 с.
18. Бараксанов, Ю. П. ПИД - регуляторы в системах автоматического регулирования/ Ю. П. Бараксанов, Н. Н. Попов // пособие для курсов.
19. Потрнягин, Л.С. Математическая теория оптимальных процессов / Л. С. Потрнягин. М.: Наука, 1969. – 384 с.
20. Пупков, К. А. Синтез оптимального управления динамическим объектом со случайными начальными значениями / К. А. Пупков, С. Ф. Фам, А. И. Дивеев// Наука и образование, 2012. –№ 3. http://technomag.edu.ru/doc/376455.html
21. Синергетические методы управления сложными системами: механические и электромеханические системы / под общ. Ред. А. А. Колесникова. М.: КомКнига, 2006. –304 с.
22. Современная прикладная теория управления: синергетический подход в теории управления // под ред. А. А. Колесникова. Ч. II. Таганрог: Изд-во ТРГУ, 2000. – 559 с.
23. Дивеев, А. И. Численный метод сетевого оператора для синтеза системы управления с неопределенными начальными значениями // Изв. РАН. Теория и системы управления, 2012. – № 2. – С. 63 – 78.
24. Соболь, И. М. Выбор оптимальных параметров в задачах со многими критериями: учебное пособие для вузов. // И.М. Соболь, Р.Б. Статников // М.: Дрофа, 2006. – 175 с.
25. Кузнецова, О. А. Адаптивный метод исследования пространства параметров. Тула: Изд-во Тул-ГУ, 2012. – 288 с.
26. Сушкин В. А. Применение многокритериальной оптимизации на основе точек Соболя // Сб. научных трудов SWorld по материалам международной научно-практ. конф. Одесса: КУПРИЕНКО, 2013. Т.9. – Вып. 1. – С. 19 – 21.
27. Грязев М. В. Применение ЛПt - последовательности при оптимизации динамического объекта / М. В. Грязев, О. А. Кузнецова // Изв. ТулГУ. Естественные науки, 2013. – Вып. 1. – С. 142 – 153.
28. Денисенко, В. ПИД –регуляторы: принципы построения и модификации. Ч.1.//Современные технологии автоматизации. –2006. -№ 4. –с. 66-74.
29. Денисенко, В. ПИД – регуляторы: принципы построения и модификации. Ч. 2.//Современные технологии автоматизации. – 2007. - № 1. – с. 78 - 88.
30. Денисенко, В. ПИД – регуляторы: вопросы реализации. Ч. 1.//Современные технологии автоматизации. – 2007. - № 4. – с. 86 - 97.
31. Денисенко, В. ПИД – регуляторы: вопросы реализации. Ч. 2.//Современные технологии автоматизации. – 2008. - № 1. – с. 86 - 97.
32. Increasing Customer Value of Industrial Control Performance Monitoring- Honeywell’s Experience/ Lane Desborough1 and Randy Miller, Honeywell Hi-Spec
Solutions -ThousandOaks, CA 91320.
33. Штейнберг, Ш. Е. Проблемы создания и эксплуатации эффективных систем регулирования/ Ш. Е. Штейнберг и др. // АСУ для промышленных предприятий. – 2007. - № 7 – С. 1 - 5.
34. Писарев, А. В. Сравнительные исследования расчётных методов определения параметров настроек промышленных ПИД – регуляторов/ А. В. Писарев, С. И. Новиков //Энергетика и теплотехника. Сборник научных трудов. Вып. 11. - НГТУ, 2007. - с. 191 – 200.
35. Wen. Tan. Comparison of some well - known PID tuning formulas/ Wen. Tan. Jizhen Liu, Tongwen Chen, Horacio. J. Marquez // Computers and Chemical Engineering. - 2006. - № 30. – p. 1416 - 1423.
36. Давыдов, Н. И. Определение параметров настройки ПИД – регулятора по переходной характеристике объекта управления/ Н. И. Давыдов, О. М. Идз он, О. В. Симонова // Теплоэнергетика. - 1995. - № 10. - с. 17 - 22.
37. Astrom K. J. Revisiting the Ziegler - Nichols step response method for PID control/ K. J. Astrom, T. Hagglund // Journal of Process Control - 2004. - № 4 -p.635 - 650. 38. Смирнов, Н. И. О корректности настройки ПИ Д - регулятора при аппроксимации переходной характеристики объекта регулирования апериодическим звеном с транспортным запаздыванием./ Н. И. Смирнов, В. Р. Сабанин, А. И. Репин // Промышленные АСУ и контроллеры – 2007. - № 1 – С. 35 - 39.
СИНТЕЗ РЕГУЛЯТОРОВ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОПАСНЫМИ ПРОИЗВОДСТВАМИ
Учебное пособие
Омск
Издательство ОмГТУ
Составители: Гебель Е.С., Пастухова Е.И.
Учебное пособие предназначено для магистров направления подготовки магистратуры 15.04.04 «Автоматизация технологических процессов и производств» для изучения дисциплины «Теория автоматизации технологических процессов и производств».
Изложенный в учебном пособии материал позволит сформировать знания о современных методах и средствах, используемых при создании автоматизированных систем управления технологическими процессами опасных производств.
Содержит краткое описание теоретического материала, алгоритм решения задач анализа и синтеза систем управления. Выполнение практического задания сопровождает теоретический материал.
Печатается по решению редакционно-издательского совета
Омского государственного технического университета
Оглавление
ВВЕДЕНИЕ.. 4
Глава 1. Идентификация технологических объектов управления. 6
1.1 Классификация опасных производственных объектов. 6
1.2. Идентификация параметров технологического объекта управления. 9
1.2.1. Экспериментальное определение динамических свойств объектов. 11
1.2.1.1. Снятие переходной характеристики (кривой разгона) 11
1.2.1.2 Снятие импульсной переходной характеристики. 12
1.2.2. Идентификация технологического объекта средствами пакета Simulink. 19
1.2.2.1 Создание файла данных и их предварительная обработка. 19
1.2.2.2 Оценка адекватности модели объекта управления. 26
1.2.2.3 Определение передаточных функций непрерывной и дискретной моделей ТОУ.. 29
1.2.2.4 Анализ технологического объекта управления. 30
1.2.3 Аппроксимация модели по переходной характеристике. 36
1.2.3.1. Аппроксимация модели объекта в виде n последовательных звеньев. 38
1.2.3.2. Аппроксимация модели методом В. Я. Ротача. 43
Глава 2. Синтез регулятора системы автоматического управления. 50
2.1 Задача синтеза регуляторов. 53
2.2 Анализ системы регулирования давления в ресивере. 55
2.3 Синтез регулятора АСР. 60
2.3.1 Выбор типа регулятора. 60
2.3.2. Аналитическая настройка каналов регулирования. 62
2.3.3. Настройка каналов регулирования для обеспечения заданных значений запасов устойчивости 66
2.3.4. Синтез регуляторов для технологических объектов с большим запаздыванием.. 70
2.3.5. Автоматизированный расчет настроечных коэффициентов регулятора средствами SIMULINK 73
ЗАКЛЮЧЕНИЕ.. 80
Список литературы.. 82
ВВЕДЕНИЕ
Учебное пособие разработано в соответствии с рабочей программой дисциплины «Теория автоматизации технологических процессов и производств»,являющейся одной из основных при подготовке магистров по направлению 15.04.04 «Автоматизация технологических процессов и производств».
Проектирование системы автоматического управления технологическим объектом или процессом (машины, аппарата, установки, технологической линии и т.п.) заключается в подборе необходимых средств автоматизации, составлении структурной схемы, выборе и расчете передаточных функций звеньев системы. В качестве математических моделей проектируемых систем обычно используют стандартизованные средства автоматизации с известными параметрами передаточных функций. Однако для реальной технологической установки, например ректификационной колонны, скруббера, реактора и др., передаточная функция обычно либо совсем не известна (не входит в номенклатуру технических данных технологического оборудования), либо не известны значения ее параметров. Таким образом, актуальность решения задач идентификации моделейтехнологических объектов управления и синтеза регулирующих устройств является актуальной проблемой.
Особую группу технологических объектов управления (ТОУ) составляют опасные производственные объекты, классификация которых в соответствии с Федеральным законом от 21.07.1997 N 116-ФЗ "О промышленной безопасности опасных производственных объектов" представлена в первом разделе. На конкретном примере, а именно автоматизированной системе управления технологическим процессом производства фенола и ацетона, описан процесс идентификации технологического объекта управления, который включает этап проведения эксперимента, экстраполяции (сглаживания временных рядов для элиминирования случайных колебаний) численных значений входных и выходных сигналов и сравнительный анализ моделей по имеющимся экспериментальным данным. Алгоритм идентификации реализован с применением программного продукта MATLABR2013b пакета SystemIdentificationToolbox.
Нетривиальной задачей при проектировании САР основных технологических параметров (расхода, давления, температуры, концентрации) является настройка устройства управления (регулятора), реализующего ПИД-закон регулирования в связи с чувствительностью таких систем к отклонению от оптимальных значений и отсутствием возможности раздельной настройки каналов управления.Кроме того требования к переходным и установившимся режимам работы, как правило, носят противоречивый характер, таким образом, синтез настроек ПИД – регулятора в системах автоматического управления является задачей многокритериальной оптимизации. Во втором разделе учебного пособия описаны методы структурного и параметрического синтеза регулятора с учетом принятых в нефтепереработке и нефтехимии значений показателей критериев качества. Апробация рассмотренных методик выполнена на примере контура регулирования давления на выходе ресивера, в соответствии с полученной в первой главе расчетной моделью технологического объекта управления.








