ПРИЛОЖЕНИЯ
к методическим указаниям по выполнению лабораторных работ по дисциплине Инерциальные и интегрированные навигационные системы
| | | | |
| | | СОГЛАСОВАНО
Начальник ЦПО
ЦНИИ «Электроприбор»
д.т.н., проф.О.А. Степанов
____________________В.Г. Пешехонов
"_____"__________________2004 г.
д.т.н., проф.____________________В.Г. Пешехонов
"_____"__________________2004 г.
д.т.н., проф.____________________В.Г. Пешехонов
"_____"__________________2004 г.
| | | | СОСТАВИЛ
профессор кафедры информационно-навигационных систем СПбГУ ИТМО
д.т.н., проф.Г.И. Емельянцев
____________________В.Г. Пешехонов
"_____"__________________2004 г.
д.т.н., проф.____________________В.Г. Пешехонов
"_____"__________________2004 г.
д.т.н., проф.____________________В.Г. Пешехонов
"_____"__________________2004 г.
| |
Санкт-Петербург
СОДЕРЖАНИЕ
Стр.
|
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
| |
Перечень основных обозначений и сокращений
П.1. Назначение, технические характеристики и конструктивные особенности
БИИМ на ДНГ………………………………………………………………………….
1.1. Инерциальный измерительный модуль…………………………………………..
1.2. Допустимые значения погрешностей выработки параметров…………………
1.3. Особенности конструкции………………………………………………………..
1.3.1. Роторный вибрационный гироскоп РВГ…………………………………...
1.3.2. Устройство обратной связи РВГ
1.3.3. Капиллярный акселерометр АК-5…………………………………………
1.3.4. Плата питания и управления………………………………………………..
П.2. Назначение, технические характеристики и конструктивные особенности
БИИМ на ВОГ
2.1. Инерциальный измерительный модуль………………………………………….
2.2. Допустимые значения погрешностей выработкипараметров………………….
2.3. Особенности конструкции………………………………………………………..
2.3.1. Волоконно-оптический гироскоп ВГ951…………………………………..
2.3.2. Маятниковый акселерометр АК10/4……………………………………….
2.3.3. Система термостатирования………………………………………………..
2.3.4. Аналого-цифровой преобразователь………………………………………
2.3.5. Бортовой вычислитель………………………………………………………
2.3.6. Опторазвязка…………………………………………………………………
2.3.7. Моментный двигатель МД71……………………………………………….
2.3.8. Датчик угла ДУ-71-3………………………………………………………..
2.3.9. Контроллер МК008………………………………………………………….
2.3.10. Контроллер МК006…………………………………………………………
2.3.11. Токоподвод…………………………………………………………………
П.3. БИИМ на ЛГ КМ-11, особенности конструкции и основные технические характеристики
3.1. Особенности конструкции……………………………………………………….
3.2. Технические характеристики…………………………………………………….
3.3. Обеспечивающая электроника…………………………………………………..
П.4. Алгоритмы основных задач БИНС на ДУС с вычислением в задаче ориентации
в качестве промежуточного кинематического параметра вектора Эйлера
4.1. МО задачи формирования приращений на рабочей частоте векторов
кажущихся линейной скорости, линейного перемещения и вектора
квазикоординат……………………………………………………………………..
4.1.1. МО задачи формирования приращений векторов кажущихся
линейной скорости и линейного перемещения……………………………
4.1.2. МО задачи формирования приращений вектора угла поворота…………
4.2. МО задачи начальной («грубой») ориентации объекта………………………...
4.3. МО задачи пространственной ориентации объекта…………………………….
4.4. МО задачи преобразования сигналов ЛА на навигационные оси и
интегрирования…………………………………………………………………….
4.5. Формирование управлений (сигналов демпфирования и коррекции)…………
П5. Модели погрешностей и аналитические решения
5.1. Классическая форма модели погрешностей..........………………………………
5.2. Аналоговая форма модели погрешностей………………………………………
5.3. Приближенные аналитические решения………………………………………...
П7. Программы read_1.m, BINS_LG_SRdr_o_Vidat_kz.m
Литература
ПЕРЕЧЕНЬ ОСНОВНЫХ ОБОЗНАЧЕНИЙ И СОКРАЩЕНИЙ
БИИМ - бескарданный инерциальный измерительный модуль;
БИНС - бескарданная инерциальная навигационная система;
ВОГ - волоконно-оптический гироскоп;
ДНГ – динамически-настраиваемый гироскоп;
ДП - динамические параметры;
ДУС – датчик угловой скорости;
ИБ - измерительный блок;
ИМ – измерительный модуль;
ИИМ - инерциальный измерительный модуль;
ИСК - инерциальная система координат;
ЛА - линейный акселерометр;
ЛГ – лазерный гироскоп;
МГХ - массогабаритные характеристики;
НП - навигационные параметры;
ПА - приемная аппаратура;
СНС - спутниковая навигационная система;
ЧЭ – чувствительные элементы;
GPS – глобальная СНС (США);
PC - персональный компьютер;
stand.exe, conv_dat3.m, conv1A.mdl и reader.exe –
- комплекс программ для записи и предварительной обработки данных ЧЭ ИБ БИИМ и приемника GPS в пакете Matlab;
read_1.m, BINS_LG_SRdr_o_Br_Vidat_kz.m, BINS_LG_SRdr_o_Br_Vi_kz1.mdl –
- комплекс программ для обработки данных стендовых испытаний ИБ БИИМ в пакете Matlab по дискретным алгоритмам БИНС.
Особенности конструкции
ИМ выполнен в виде блока (рис. 1.3.0), включающего в себя набор миниатюрных гироскопов и акселерометров с обеспечивающей аналоговой электроникой. На выходе ИМ вырабатываются информационные сигналы в виде напряжения постоянного тока, которые соответствуют трем составляющим угловой скорости и трем составляющим линейного ускорения.
Крутизна выходного сигнала:
· по угловой скорости - 88,9 мВ/град./с;
· по линейному ускорению - 1600 мВ/g.
Диапазон измерения:
· угловой скорости - + 90 град./с;
· линейного ускорения - + 5 g.





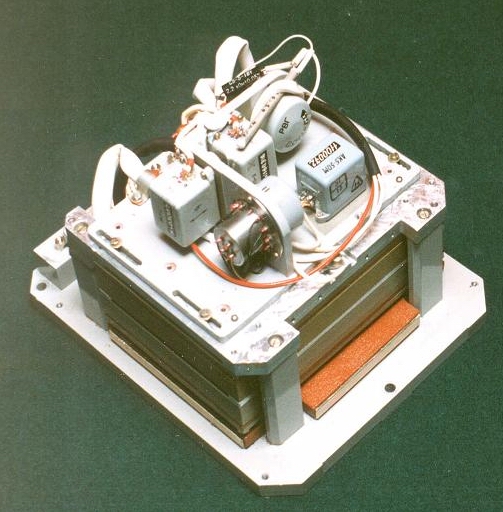
Рис. 1.3.0. ИМ на ДНГ в сборке (со снятым кожухом)
1 – гироскопы РВГ; 2 - акселерометры АК-5.
Конструкция ИМ на ДНГ, представленного на рис. 1.3.0, состоит из двух корпусов - внешнего и внутреннего, выполненных из алюминиевого сплава.
На внутреннем корпусе размещены: два роторных вибрационных гироскопа РВГ (поз.1), три акселерометра АК-5 (поз.2), два устройства обратной связи УОС РВГ, плата питания и управления ППУ.
На внешнем корпусе ИМ установлены два разъема: вилка СНЦ23-19/22В-1-В, предназначенная для подключения источников питания, и вилка DS37L, предназначенная для передачи выходных сигналов в вычислитель БИИМ.
Внутренний корпус соединен с внешним через три теплоизоляционные шайбы. Взаимная выставка корпусов производится с помощью двух штифтов, запресованных в наружный корпус, и отверстия и паза во внутреннем корпусе.
Наружный корпус закрывается кожухом.
Измерительный модуль спроектирован в объеме 1620 см3 . При этом объем датчиков (РВГ, АК5) не превышает 72 см3, объем электронных устройств ДУС РВГ-503 см3, объем системы термостатирования СТС - 175см3, объем корпусных элементов (в том числе разводка жгутов, разъемы) - 870 см3.
Электропитание ИМ осуществляется:
1) от двух гальванически не связанных источников постоянного тока напряжением + 15 В относительно средней точки;
2) постоянным током напряжением 12 В.
Особенности конструкции
БИИМ на ВОГ (прибор ВИИМ – рис. 2.3.1) является основным прибором изделия «Мининавигация-К» и состоит из измерительного модуля (ИМ) с блоком электроники и основания с элементами системы автокомпенсационного вращения.
Состав ИМ:
· три ВОГ - ВГ 951;
· три линейных акселерометра АК10/4 (с кварцевым чувствительным элементом);
· плата вторичного источника питания (ВИП) чувствительных элементов;
· плата системы термостатирования (СТС) с нагревательными транзисторами и терморезистором;
· плата датчика температуры (ДТ);
· модуль аналогового ввода-вывода (АЦП) DM6430HR-1;
· модуль процессорный СМС16686GX300HR-32;
· расширитель интерфейса РСМ-3610-А;
· источник питания IPWR104-L60W;
· плата индикации.
Состав основания:
· микроконтроллер МК-БСС управления моментным двигателем и датчиком угла;
· моментный двигатель БМДР-12-2;
· преобразователь угла ИПУ-ДУЦ;
· токоподвод неограниченного угла вращения;
· арретир.
ВОГ и акселерометры являются чувствительными элементами прибора, которые измеряют вращательное и поступательное движение носителя в пространстве.
Гироскопы и акселерометры устанавливаются на кронштейне ИМ, который подогревается двумя нагревательными транзисторами. Контроль за температурой ИМ осуществляется ДТ, который выдает в модуль процессорный, через АЦП, текущее значение температуры. СТС обеспечивает прогрев чувствительных элементов до рабочей температуры порядка +40 °С с последующей стабилизацией ее с точностью не хуже 1 °С.
Питание чувствительных элементов обеспечивает ВИП.
АЦП принимает сигналы от чувствительных элементов в аналоговом виде и преобразовывает их в машинный код. Далее этот код по шине ISA передается в модуль процессорный, где решаются задачи выработки углов наклона и курса географического. Для решения этих задач с заданной точностью используется автокомпенсационное вращение ИМ и внешняя информация от потребителя о скорости движения и месте нахождения носителя. Связь с потребителем и микроконтроллером МК-БСС, отвечающим за автокомпенсационное вращение, осуществляется через расширитель интерфейса.
Питание АЦП, модуля процессорного, расширителя интерфейса и платы индикации осуществляет специализированный источник питания.
АЦП, модуль процессорный, расширитель интерфейса и источник питания конструктивно выполнены в формате РС/104. Это исполнение позволяет соединять эти модули посредством проходного разъема РС/104, образуя блок вычислителя, обмен между модулями которого осуществляется по шине ISA.
ИМ устанавливается на основание и имеет одну степень свободы относительно оси, перпендикулярной основанию прибора, т.е. ИМ относительно основания прибора может разворачиваться на неограниченный угол. Разворот обеспечивается моментным двигателем, а значение угла рассогласования ИМ с основанием вырабатывается двухотсчетным преобразователем угла, который обеспечивает точность съема угла порядка 10 угловых секунд.
Электрическая связь ИМ с неподвижными элементами прибора и с потребителем осуществляется через кольцевой токоподвод неограниченного угла поворота.








Рис. 2.3.1. Прибор ВИИМ (внешний вид со снятой крышкой)
1 - измерительный модуль; 2- гироскопы - ВГ 951; 3 – акселерометры - АК10/4;
4 - бортовой вычислитель; 5 – основание
Функциональная схема прибора ВИИМ приведена на рис. 2.3.2.

Рис. 2.3.2 - Функциональная схема прибора ВИИМ
Система термостатирования
СТС предназначена для обеспечения температурного режима работы чувствительных элементов. Этот режим выбирается из соображений улучшения качественно-точностных характеристик чувствительных элементов: смещение нуля, дрейф, масштабный коэффициент и т.д. Оптимальная температура работы чувствительных элементов, в зависимости от условий эксплуатации изделия, находится в пределах от плюс 40 до плюс 65 °С. СТС включает в себя плату управляющей электроники (плата СТС ДНИЯ.421221.016), четыре нагревательных транзистора (НТ) и терморезистор. НТ устанавливаются в непосредственной близости к чувствительным элементам и служат источниками выделения тепловой энергии. Терморезистор устанавливается в центре ИИМ и выполняет функцию термодатчика в цепи обратной связи СТС.
СТС работает в двух режимах:
- форсированный прогрев до рабочей температуры;
- стабилизация рабочей температуры с точностью не менее 1 °С.
СТС начинает функционировать сразу после подачи напряжения питания.
Плата СТС предназначена для управления тепловой мощностью, выделяемой на нагревательных элементах, в зависимости от текущей температуры ИМ, определяемой с помощью терморезистора, установленного в ИМ.
Основные технические характеристики платы СТС:
- стабилизируемая рабочая температура ИМ 40 °С;
- погрешность стабилизации ±2 °С;
-максимальная мощность, выделяемая на нагревательных элементах, 25 Вт;
- напряжение питания 27 В.
Нагревательные транзисторы (четыре транзистора 2Т709А2)
НТ (исполнительные (нагревательные) элементы) являются составной частью системы термостатирования (СТС) и предназначены для преобразования энергии электрического тока в тепло. Исполнительными элементами СТС являются полупроводниковые p-n-p транзисторы 2Т709А2. Выбор транзисторов в качестве нагревательных элементов обусловлен, прежде всего, соображениями простоты реализации схемы управления, так как тепловая мощность, выделяемая на транзисторе, пропорциональна току, протекающему через него. В результате удалось реализовать простейшую и надежную линейную систему термостатирования ИМ. Основные технические характеристики транзистора 2Т709А2:
- максимальный ток коллектора IK – 10 А;
- максимальное напряжение коллектор-эммитер UКЭ - 80 В;
- максимально допустимая мощность, рассеиваемая на коллекторе, - 30 Вт;
- максимально допустимая температура корпуса TК – 100 °С;
- статический коэффициент передачи по току h21Э - 500 – 30000.
Датчик температуры.
ДТ, используемый в триаде, предназначен для измерения текущей температуры ИМ и выдачи ее в цифровом виде в плату процессора. В вычислителе построена тепловая модель погрешностей чувствительных элементов, и по данным ДТ, идет прогнозирование и оценка тепловых поправок к показаниям чувствительных элементов. ДТ начинает функционировать после получения специализированной команды от вычислителя.
Опторазвязка
Опторазвязка предназначена для электрической изоляции вход-выход цифрового интерфейса связи изделия с потребителем.
Опторазвязка состоит из трех плат:
- для интерфейса RS-232 – ДНИЯ.469655.576;
- для интерфейса RS-422 – ДНИЯ.469655.577;
- для интерфейса RS-485 – ДНИЯ.469655.578.
В прибор ВИМ, в зависимости от типа интерфейса, ставится одна из выше перечисленных плат. Платы взаимозаменяемые.
Конструктивно опторазвязка выполнена в виде печатной платы с установленными на ней электроэлементами.
Основные характеристики опторазвязки:
- скорость передачи информации - от 4800 до 115200 бит/с;
- электрическая изоляция вход-выход – не менее 20 МОм;
- питание - 5 В постоянного тока;
- габариты – не более 50х50х20 мм;
- масса - 0,1 кг.
Моментный двигатель МД71
МД71представляет собой моментный двигатель постоянного тока, бесконтактный, с электромагнитной редукцией частоты вращения и с возбуждением от постоянных магнитов. Конструктивно МД71 выполнен без собственных подшипников, в виде двух отдельных сборок статора и ротора, непосредственно встраиваемых в прибор ВИИМ.
Моментный двигатель предназначен для создания момента вращения вокруг оси, перпендикулярной основанию прибора ВИИМ. Работа двигателя управляется контроллером. Код режима работы двигателя генерируется в плате процессора, далее это код поступает в микроконтроллер, в котором вырабатываются аналоговые управляющие сигналы, идущие на обмотки двигателя.
Основные характеристики МД71:
- диапазон рабочих углов поворота ротора от нулевого положения - неограниченный;
- вид тока - постоянный;
- управление - по напряжению;
- число обмоток (фаз) - 3;
- номинальный вращающий момент - 0,1 Н×м;
- электромагнитная редукция - 32;
- потребляемый ток - 0,25 А;
- габариты – диаметр 71х24 мм;
- масса ротора - 0,114 кг;
- масса статора - 0,347 кг.
Датчик угла ДУ-71-3
ДУ-71-3 представляет собой электромеханическое устройство, состоящее из кольцевого трансформатора и двух многополюсных датчиков угла: точный отсчет и корректирующий отсчет, образуя два многополюсных синусно-косинусных вращающихся трансформатора с коэффициентами редукции 32 и 31. Кольцевой трансформатор осуществляет бесконтактную передачу напряжения возбуждения на обмотки ротора точного отсчета и корректирующего отсчета.
Конструктивно ДУ71-3 выполнены без собственных подшипников, в виде двух отдельных сборок статора и ротора, непосредственно встраиваемых в аппаратуру. ДУ предназначен для преобразования угловых перемещений вала в функциональные электрические сигналы переменного тока при работе в качестве первичного преобразователя угла в преобразователе "угол-параметр-код" и обеспечивает определение угла рассогласования (разворота) между ИМ и основанием прибора. Обмотки преобразователя угла возбуждаются контроллером ДУ. Контроллер ДУ преобразует сигналы, снятые с обмоток, в код и, по запросу с платы процессора, выдает этот код.
Основные характеристики ДУ71-3:
- погрешность передачи угла - 25";
- номинальное напряжение возбуждения - 2 В;
- номинальная частота напряжения возбуждения - 5000 Гц;
- диапазон измеряемых углов неограничен;
- число пар полюсов (коэффициент электрической редукции):
а) точный отсчет - 32;
б) корректирующий отсчет - 31;
- габариты - диаметр 71х33 мм;
- масса ротора - 0,188 кг;
- масса статора - 0,294 кг.
Контроллер МК008
Контроллер МК008 предназначен для управления МД-71. Контроллер содержит схему управления трехфазным бесконтактным моментным двигателем, схему преобразования двух аналоговых сигналов в цифровой, гальванически развязанный интерфейс RS485. Конструктивно контроллер представляет собой многослойную печатную плату с установленными на ней радиоэлементами.
Управление МД71 осуществляется от трехфазного мостового ключевого усилителя мощности, собранного на транзисторах. Транзисторы управляются микросхемой-драйвером, преобразующим цифровые сигналы управления, поступающие с микроконтроллера, в напряжения управления транзисторами.
Контроллер начинает функционировать после получения специализированной команды от платы процессора. По этой команде определяется режим работы МД71.
Основные характеристики контроллера МК008:
- напряжение питания постоянного тока – (27±3) В;
- потребляемый ток, без учета потребления МД - 100 мА;
- габариты - 78´105´16 мм;
Контроллер МК006
Контроллер МК006 предназначен для определения значения входного угла датчика угла ДУ-71-3 по сигналам от ДУ. Контроллер ДУ обеспечивает возбуждение ДУ-71-3 синусоидальным напряжением с частотой 5кГц. Функционально контроллер ДУ представляет собой устройство сбора и обработки информации на основе цифрового сигнального процессора. Обмен информацией с контроллером ДУ осуществляется по интерфейсу RS232. Конструктивно контроллер представляет собой многослойную печатную плату с установленными на ней радиоэлементами.
Микроконтроллер начинает функционировать после получения специализированной команды от контроллера ДУ.
Основные характеристики микроконтроллера МК008:
- погрешность выработки угла - ±25'';
- погрешность выработки угла после коррекции - ±3";
- напряжение возбуждения ДУ – (5,6±0,5) В;
- частота возбуждения ДУ – (5±1) кГц;
- напряжение питания постоянного тока - 18-36 В;
- потребляемый ток, без учета потребления ДУ - 100 мА.
Токоподвод
Токоподвод обеспечивает электрическую связь между неподвижным основанием прибора и вращающимся ИМ на неограниченном угле разворота. Через токоподвод осуществляются следующие электрические связи:
- питание изделия;
- информационный обмен с потребителем;
- информационный канал для проведения наладочно-регулировочных работ.
Токоподвод относится к токоподводам кольцевого типа и имеет 30 изолированных линий передачи.
П.3. БИИМ на ЛГ КМ-11, особенности конструкции и основные технические характеристики
К настоящему времени в НИИ «Полюс» создан бескарданный инерциальный измерительный модуль (ИИМ) на основе серийно изготавливаемых лазерных гироскопов (ЛГ) КМ-11, основные особенности которых состоят в следующем:
- резонатор кольцевого лазера ЛГ образован призмами с полным внутренним отражением, что позволяет получить потери нагруженного резонатора не более 0.02…0.03 % и область захвата не более 70…150 гц без использования сложных в технологии высококачественных многослойных диэлектрических зеркал;
- накачка He-Ne активной среды лазера осуществляется безэлектродным поперечным высокочастотным разрядом, что позволяет исключить смещение нуля ЛГ, присущее разряду постоянного тока, отказаться от высоковольтного питания лазера, упростить конструкцию вакуумной части прибора и обеспечить наработку на отказ в десятки тысяч часов;
- регулировка частоты генерации кольцевого лазера осуществляется пневматически, без использования подвижных элементов и при низковольтном питании (=24В);
- технология сборки позволяет проводить «горячую» юстировку элементов, селектирующих основную моду при наличии свободной, многомодовой генерации в кольцевом лазере.
Для исключения влияния зоны нечувствительности ЛГ вместо вибрации каждого из гироскопов применено реверсное вращение всего ИИМ вокруг оси, ортогональной плоскости палубы объекта. Ось вращения располагается по продольной оси трехгранной пирамиды, на гранях которой закреплены ЛГ, что приводит к смещению рабочей зоны от зоны нечувствительности для каждого гироскопа. Кроме того, данное вращение обеспечивает наблюдаемость дрейфов ЛГ и автокомпенсацию их проекций на плоскость, ортогональную оси вращения ИИМ. Реверс осуществляется через каждые два оборота (1 оборот за 3.6 сек) и быстро (за 0.01…0.02 сек), что не приводит к существенному возрастанию погрешностей.
3.1. Особенности конструкции
Инерциальный измерительный модуль содержит три лазерных гироскопа ЛГ КМ-11 (периметр резонатора – 44 мм, вес - 3.5 кг; дрейф нуля – 0.01 0/ч), три акселерометра АК-10 (размеры - 40х40х25 мм, вес – 50 грамм; дрейф нуля – 10-3м/с2) и электронные модули, обеспечивающие функционирование инерциальных чувствительных элементов и преобразование выходных сигналов в цифровую форму, установленные на вращающемся основании (рис. 3.1 и рис. 3.2).
Основным несущим элементом конструкции ИИМ является металлический конус, выполненный из дюралюминия для исключения намагниченности. Своей нижней частью конус стыкуется с устройством вращения посредством трех стыковочных узлов. Сверху на конус одета и приклеена к нему трехгранная призма, выполненная из ситалла.
На гранях призмы располагаются лазерные гироскопы. Крепление корпусов кольцевых лазеров к ситалловой призме производится с помощью клея в 4-х точках через короткие цилиндрические проставки. Это сделано для того, чтобы между призмой и резонатором можно было пропустить нижнюю часть двойного пермаллоевого экрана при минимальном нарушении его целостности. В верхней части призмы и в середине конуса по оси вращения имеется сквозная цилиндрическая полость. В эту полость сверху вставляется блок акселерометров, выполненный из ситалла. Он жестко крепится с помощью клея к трехгранной призме, образуя единый ситалловый блок чувствительных элементов (БЧЭ).










Рис. 3.1. Опытный образец ИИМ на ЛГ КМ-11
(1 - ЛГ в магнитных экранах; 2 – акселерометры; 3 – электронные модули; 4 – дюралевый конус; 5 – призма из ситалла)

Сверху на блок акселерометров с помощью клея жестко крепится трехгранный оптический элемент, выполненный из ситалла в виде куба с тремя зеркальными гранями. Этот элемент физически задает приборную систему координат ИИМ и используется, в частности, при калибровке измерительного модуля.
Данная конструкция БЧЭ позволяет с высокой точностью сохранять взаимное положение датчиков, как во времени, так и при воздействии неблагоприятных факторов, например, изменения температуры.
К нижней части металлического конуса симметрично по окружности прикреплены три горизонтальных площадки. В центре каждой из площадок установлена вертикальная стойка, средняя часть которой с помощью перемычки соединена с верхней частью металлического конуса.
Конус с площадками, вертикальные стойки и перемычки образуют жесткий замкнутый металлический каркас ИИМ, практически развязанный от ситаллового БЧЭ. К этому каркасу крепятся электронные блоки, разъёмы и, если будет необходимо, внешний магнитный экран. Сверху на вертикальные стойки во время калибровки ИИМ может быть временно закреплена горизонтальная площадка для возможности размещения дополнительного оборудования, например, точного уровня.
Электроника ИИМ размещается в 6-ти блоках, выполненных в виде замкнутых экранирующих вертикальных коробок. Эти коробки помещаются на площадках (по две на каждой) и прикреплены, кроме того, к вертикальным стойкам. На площадках также расположены два блока вторичных источников питания и места крепления для трех (по одному на каждой площадке) разъемов РС-10 (вилка), которыми заканчивается токоподвод устройства вращения. Электроника ИИМ в свою очередь замыкается на три кабельных разъема РС-10 (розетка), расположенных на кабелях, закрепленных с необходимой свободой (для возможности завинчивания) в районе каждой из площадок.
ИИМ термостатирован при рабочей температуре 20…25оС с точностью ±1оС. Термостатирование приводит к повышению точности и надежности ЛГ.
3.2. Технические характеристики
ИИМ в корпусе системы совершает два оборота в одну сторону, затем быстрый реверс и два оборота в другую сторону. Время одного оборота составляет 3.6 с.
Измеряемые величины - квазикоординаты: приращения на рабочей частоте угла поворота (от ЛГ) и кажущейся линейной скорости (от акселерометров) ИИМ в проекциях на приборные оси модуля.
Частота опроса датчиков - 1 кГц
Частота выдачи информации - 200 Гц
Канал выдачи информации - 3-х проводной CAN интерфейс
Напряжение питания - 24 В
Потребляемая мощность - не более 45 Вт
Габаритные размеры - Ø370мм, h = 261мм
Вес ~ 20…25кг
3.3. Обеспечивающая электроника
Электроника, расположенная в ИИМ, решает задачи обеспечения функционирования ЛГ, а также съема, преобразования и передачи по каналу связи информации с ЛГ и акселерометров.
Для обеспечения работы 3-х ЛГ необходимо организовать для каждого из них начальный поджиг, систему регулирования амплитуды выходного сигнала и систему регулировки оптической длины периметра.
Амплитуда сигнала регулируется путем изменения мощности высокочастотной накачки, которая в свою очередь зависит от напряжения питания генератора накачки.
Регулирование оптической длины периметра осуществляется путем изменения плотности воздуха в одном из замкнутых каналов ЛГ. Длину периметра необходимо держать в максимуме генерации сигнала. Такие экстремальные системы требуют подачи пилот-сигнала в контур регулирования и система должна держать близкую к нулю величину отклика на пилот-сигнал. Пилот-сигнал вводится в контур регулирования периметра с помощью пьезокерамического вибратора.
Решение всех задач, связанных с поджигом, регулировкой амплитуды, периметра и контролем за работой этих систем, осуществляется с помощью микроконтроллера типа ММ 167 фирмы PHYTEC (Германия) с применением дополнительных внешних преобразователей и усилителей.
Для уменьшения выделяемой мощности в контурах регулирования управление конечными исполнительными элементами (генератором накачки и нагревателем) осуществляется сигналом с широтно-импульсной модуляцией. Тогда вместо линейных усилителей применяются ключевые схемы, а для подавления частоты ШИМ в контуре регулирования амплитуды применяются дополнительные фильтры. В контуре регулирования периметра частота ШИМ подавляется самим нагревателем.
Задача съема, преобразования и передачи информации решается с помощью второго микроконтроллера ММ 167.
Электроника ИИМ содержит три почти одинаковых канала обработки информации с датчиков, поэтому рассмотрим блок-схему одного из каналов. Фотоприемник преобразует оптический сигнал бегущей интерференционной картины в электрический синус-косинусный сигнал. После усиления в усилителях эти сигналы поступают на формирователи, где из них формируется меандр, поступающий для дальнейшей обработки на вход реверсивного счетчика микроконтроллера обработки информации. Меандр необходим для обеспечения устойчивой работы реверсивного счетчика микроконтроллера.
Для обеспечения работы ЛГ синус-косинусный сигнал также поступает на вход детектора, где из него формируется сигнал, пропорциональный амплитуде синус-косинусного сигнала и уже он поступает на вход АЦП микроконтроллера жизнеобеспечения. Микроконтроллер формирует ШИМ сигнал регулировки амплитуды, которая после усиления ключевой схемой и фильтрации поступает на вход генератора накачки, задавая мощность накачки и, следовательно, амплитуду выходного сигнала ЛГ. Микроконтроллер изменяет скважность ШИМ таким образом, чтобы амплитуда выходного сигнала ЛГ оставалась постоянной (2В на выходе усилителя).
Контур регулирования периметра также использует сигнал с детектора. В микроконтроллере методом синхронного детектирования из него выделяется сигнал отклика на пилот-сигнал. Сам пилот-сигнал в виде меандра частотой ~230 гц формируется в микроконтроллере, затем усиливается ключевым усилителем и поступает на вход пьезокерамического вибратора. Вибратор установлен в корпусе нагревателя и при его работе происходит модуляция плотности воздуха в канале ЛГ и, следовательно, модуляция периметра. Следствием этого и является появление сигнала отклика в выходном сигнале ЛГ. Микроконтроллер формирует ШИМ сигнал регулировки периметра, который через ключевой усилитель поступает на нагреватель. Скважность этого сигнала определяет плотность воздуха в канале ЛГ и, в конечном счете, оптическую длину периметра. Микроконтроллер так меняет скважность ШИМ последовательности, чтобы сигнал отклика был близок к нулю, что при правильной фазировке контура регулирования означает, что частота резонатора ЛГ находится в максимуме усиления лазерного перехода.
Начальный поджиг ЛГ осуществляется генератором поджига, который формирует импульсы поджига амплитудой ~300В, поступающие на вход трансформатора поджига. Генератор поджига управляется микроконтроллером жизнеобеспечения, который отключает генератор, когда появится выходной сигнал ЛГ или по прошествии заданного времени поджига ~ 30 сек. В последнем случае формируется признак отказа ЛГ.
В ИИМ применяются акселерометры типа АК-10. Эти акселерометры содержат внутри всю электронику жизнеобеспечения и не требуют какого-либо внешнего управления. Аналоговый сигнал акселерометра поступает на вход схемы преобразователя аналог-частота и далее на счетчик микроконтроллера обработки информации.
Каждый из микроконтроллеров имеет встроенный CAN интерфейс. Эти интерфейсы через буферные схемы связаны между собой и внешним разъемом ИИМ трехпроводной линией, что даёт возможность передавать информацию внешнему потребителю и друг другу. Кроме того, микроконтроллер формирует для внешнего потребителя синхроимпульсы частотой 1 кГц, синфазные с моментами опроса датчиков.
ИИМ соединяется электрически с вращающемся токоподводом посредством трех разъемов С1, С2 и С3 типа РС-10.
DMayo 0
0 0 DMazo]; -погрешности масштабных коэффициентов ЛА;
Cab – матрицаориентации осей чувствительности ЛА (их приведения к осям измерительного блока (ИБ) – приборным осям xb,yb,zb);
weight_Dn=[weight_Dnx 0 0
0 weight_Dny 0
0 0 weight_Dnz];
– веса текущих оценок смещений нулей ЛА.
Входные переменные:
n(i+1)=[nxb;nyb;nzb] – текущие на высокой частоте (с дискретностью dt); значениявектора кажущегося ускорения в проекциях на оси ИБ БИИМ (yb - продольная ось, zb – ортогонально палубе объекта, xb – правый борт), измеряемые ЛА
Выходные переменные:
b1b(j+1)=[b1xb;b1yb;b1zb] - приращения составляющих вектора кажущейся линейной скорости в приборных осях (осях ИБ БИИМ), формируемые с дискретностью dT;
b2b(j+1)=[b2xb;b2yb;b2zb] - приращения составляющих вектора кажущегося линейного перемещения в приборных осях (осях ИБ БИИМ), формируемые с дискретностью dT.
% формирование первых и вторых интегралов в осях чувствительности акселерометров на шаге dT
Алгоритм задачи, решаемой с дискретностью dt (оператор i) внутри рабочего цикла dT:
b1a_(i+1)=b1a_(i)+k_aks*n(i+1)*dt;
b2a_(i+1)=b2a_(i)+(b1a_(i+1)+b1a_(i))*dt/2;
при i=0
b1a_(i)=0;b2a_(i)=0;
В конце цикла dt
( значенияпервых и вторых интегралов в осях чувствительности ЛА на шаге dT)
b1a_(j+1)=b1a_(i+1);
b2a_(j+1)=b2a_(i+1); -
% формирование первых и вторых интегралов в осях ИБ с учетом погрешностей масштабных коэффициентов и смещений нуля (м/c2) ЛА
В цикле dT ( оператор j)
b1b_(j+1)=Cab*[(E - DMao)*b1a_(j+1) - DAo*dT];
b2b_(j+1)=Cab*[(E - DMao)*b2a_(j+1) - DAo*(dT^2)/2];
b1(j+1)=b1b_(j+1) - weight_Dn*FKDn(j)*dT;
b2(j+1)=b2b_(j+1) - weight_Dn*FKDn(j)*(dT^2)/2;
DMgyo 0
0 0 DMgzo]; -по