Из соображений симметрии.
Если тело имеет центр материальной симметрии, то его центр тяжести совпадает с этим центром симметрии. Отсюда, например, следует, что центр тяжести однородного шара совпадает с центром шара (см. рис. 116).

Рис. 116
Если тело имеет ось материальной симметрии, то его центр тяжести лежит на оси симметрии. Исходя из этого, легко найти центр тяжести однородной прямоугольной пластинки (см. рис. 117).

Рис. 117
Если тело имеет плоскость материальной симметрии, то его центр тяжести лежит в плоскости симметрии. Пользуясь этим, легко найти центр тяжести однородного кругового цилиндра (см. рис. 118).

Рис. 118
Метод разбиения тела на части.
Пусть тело можно разбить на несколько частей, для каждой из которых положение центра тяжести известно (см. рис. 119). Тогда общий центр тяжести тела может быть найден по формуле
 (86)
(86)
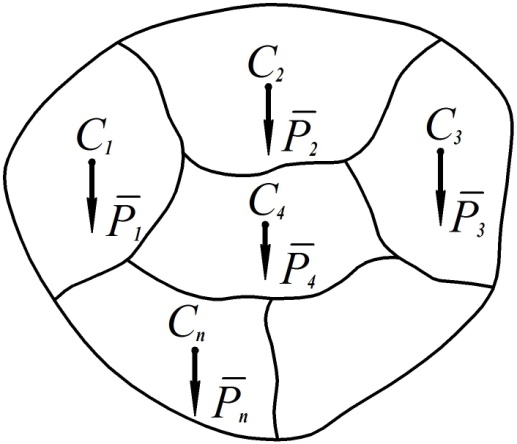
Рис. 119
Метод отрицательных масс.
Этот метод является обобщением метода разбиения тела на части на случай, когда тело имеет пустые полости с известным положением их центров тяжести, если эти полости заполнить веществом. В этом случае можно считать тело с пустыми полостями состоящим из воображаемого тела с заполненными полостями и телами в виде полостей, которым следует приписать отрицательную массу. После этого центр тяжести исходного тела можно найти по формуле (86). Поясним этот метод на примере.
Пример 10
Определим положение центра тяжести однородной прямоугольной пластинки с вырезанным полукругом (см. рис. 120). Пусть задан радиус

Рис. 120
вырезанного полукруга R=1 м. Выберем оси координат, как показано на рисунке. Эту пластинку можно рассматривать как фигуру, составленную из прямоугольной пластинки и полукруга с отрицательной массой. Площади таких фигур и координаты их центров тяжести равны:
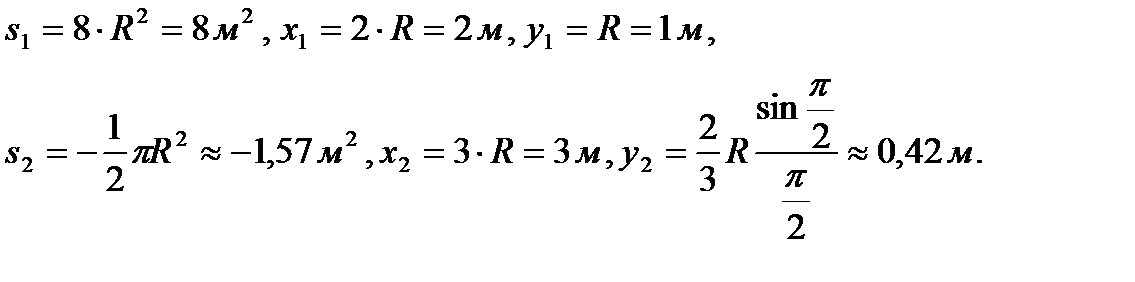
Далее в соответствии с формулой (86) найдем координаты центра тяжести пластинки:

Метод подвешивания.
Это экспериментальный метод, с помощью которого удобно находить положение центров тяжести плоских, в том числе и неоднородных, тел. Тело, подвешенное на нити, находится в равновесии под действием двух сил: силы тяжести, приложенной в центре тяжести, и силы натяжения, направленной вдоль нити. Эти две силы равны по величине и направлены вдоль одной прямой, являющейся продолжением нити. Поэтому для нахождения центра тяжести достаточно два раза подвесить тело за две различные точки и в условиях равновесия отметить на теле продолжение нити (см. рис. 121).

Рис. 121
В результате центр тяжести найдем как точку пересечения двух полученных прямых.
Метод взвешивания.
Этот экспериментальный метод используют для нахождения центров тяжести транспортных средств. Для его реализации используются весы, приспособленные для взвешивания транспортных средств. Для нахождения центра тяжести снимают два показания весов: Р – для случая, когда транспортное средство опирается на платформу весов четырьмя колесами, и  - для случая, когда транспортное средство опирается на платформу весов двумя колесами (см. рис. 122).
- для случая, когда транспортное средство опирается на платформу весов двумя колесами (см. рис. 122).

Рис. 122
В результате первого взвешивания определяется вес транспортного средства Р. Результат второго взвешивания дает силу давления передних колес на платформу весов при втором взвешивании.
Рассмотрим теперь в качестве объекта равновесия транспортное средство при втором взвешивании. Оно находится в равновесии под действием трех сил  Обозначим
Обозначим  - колесную базу транспортного средства и
- колесную базу транспортного средства и  - расстояние по горизонтали от центра тяжести до оси задних колес (см. рис. 122). Для такой системы сил сумма алгебраических моментов относительно точки касания задними колесами опорной поверхности равна нулю:
- расстояние по горизонтали от центра тяжести до оси задних колес (см. рис. 122). Для такой системы сил сумма алгебраических моментов относительно точки касания задними колесами опорной поверхности равна нулю:

Отсюда, учитывая, что  , найдем
, найдем
Библиографический список
1. Тарг, С.М. Краткий курс теоретической механики/ С.М. Тарг. М.: Высшая школа, 2007. 416с.
2. Яблонский, А.А. Курс теоретической механики/ Яблонский, А.А., Никифорова, В.М. СПб.: Лань, 2001. 764 с.
3. Мещерский, И.В. Сборник задач по теоретической механике/ И.В. Мещерский.: Лань, 2001. 448с.
4. Сборник заданий для курсовых работ по теоретической механике/ Под ред. А.А. Яблонского. М.: Интеграл-Пресс, 2001. 382с.
5. Сборник коротких задач по теоретической механике/ Под ред. О.Э. Кепе. СПб.: Лань, 2008. 368с.
О Г Л А В Л Е Н И Е
Введение 3
Раздел 1. КИНЕМАТИКА 4
Глава 1. КИНЕМАТИКА ТОЧКИ 4
1.1. Векторный способ задания движения точки 4
1.2. Задание движения точки в декартовых координатах 6
1.3.Задание движения точки естественным способом 8
Глава 2. ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 14
2.1. Поступательное движение твердого тела 14
2.2. Вращательное движение твердого тела 16
2.2.1. Основные понятия 16
2.2.2. Угловая скорость и угловое ускорение тела 17
2.2.3. Простейшие случаи вращательного движения твердого тела 18
2.2.4. Определение скоростей и ускорений точек тела 19
2.2.5. Векторные формулы для скоростей и ускорений точек тела 20
Глава 3. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ 23
3.1. Основные понятия 23
3.2. Связь между полной и локальной производными от вектора 25
3.3. Теорема сложения скоростей при сложном движении точки 27
3.4. Теорема сложения ускорений при сложном движении точки 30
Глава 4. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 37 4.1. Основные понятия 37
4.2. Скорости точек тела при плоском движении 40
4.3. Мгновенный центр скоростей 42
4.4. Ускорения точек тела при плоском движении 47
4.5. Мгновенный центр ускорений 48
4.6. Вычисление угловой скорости и углового ускорения тела при
плоском движении 52
Раздел 2. СТАТИКА 54
Глава 1. ВВЕДЕНИЕ В СТАТИКУ 54
1.1.Основные понятия 54
1.2. Аксиомы статики 56
1.3. Основные виды связей и их реакции 58
Глава 2. СИСТЕМА СХОДЯЩИХСЯ СИЛ 62
2.1. Классификация систем сил 62
2.2. Приведение сходящейся системы сил к равнодействующей 62
2.3. Уравнения равновесия 63
Глава 3. МОМЕНТ СИЛЫ ОТНОСИТЕЛЬНО ТОЧКИ И ОСИ 66
3.1. Векторный момент силы относительно точки 66
3.2. Момент силы относительно оси 67
3.3. Алгебраический момент силы относительно точки 70
Глава 4. ПАРА СИЛ И ЕЕ СВОЙСТВА 71
4.1. Понятие о паре сил 71
4.2. Основные свойства пар сил 72
Глава 5. ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К ЦЕНТРУ 74
5.1. Приведение произвольной пространственной системы сил к центру 74
5.2. Частные случаи приведения системы сил к центру 76
Глава 6. УРАВНЕНИЯ РАВНОВЕСИЯ 79
6.1. Независимые уравнения равновесия для различных систем сил 79
6.2. Различные формы независимых уравнений равновесия для плоской произвольной системы сил 81
6.3. Непрерывно распределенная нагрузка 85
6.4. Равновесие системы тел 88
Глава 7. ТРЕНИЕ И ФЕРМЫ 93
7.1. Трение скольжения 93 7.2. Трение качения 95 7.3. Расчет ферм 97
Глава 8. ЦЕНТР ТЯЖЕСТИ 103
8.1. Основные понятия 103 8.2. Центры тяжести простейших однородных тел 106 8.3. Методы нахождения центров тяжести тел 108
Библиографический список 112






