Пусть движение точки задано в координатной форме. Проекция ускорения на касательную к траектории равна  , алгебраическая скорость с точностью до знака равна модулю скорости
, алгебраическая скорость с точностью до знака равна модулю скорости  , а модуль скорости равен
, а модуль скорости равен
 . Вычислим первую производную по времени от этого выражения, получим
. Вычислим первую производную по времени от этого выражения, получим

Проекция ускорения на нормаль к траектории равна  .
.
3.При векторном способе задания движения поло-
жение точки определяется ее радиусом-вектором r ,
проведенным из некоторой точки О, принимаемой за
начало выбранной системы отсчета (рисунок 1.1).
Уравнение, выражающее зависимость радиус-вектора
точки от времени r r (t) , называют законом движе-
ния точки в векторной форме.
Для нахождения положения точки при коорди-
натном способе задания ее движения используют
выражения координат как функций времени, например, x = x (t), y = y (t).
 Векторный способ. Положение движущейся точки M относительно тела отсчета O можно определить радиус-вектором точки r, соединяющим тело отсчета и точку (рис. 57).
Векторный способ. Положение движущейся точки M относительно тела отсчета O можно определить радиус-вектором точки r, соединяющим тело отсчета и точку (рис. 57).
При движении точки M радиус-вектор r будет изменяться по модулю и направлению с течением времени t, то есть

| (1)
|
Выражение (1) определяет закон движения точки и является ее кинематическим уравнением движения в векторной форме.
Конец радиус-вектора совместно с точкой M движется в пространстве по кривой, которая является годографом радиус-вектора, а в кинематике называется траекторией точки. Движение точки по кривой называется криволинейным движением точки, если траектория точки - прямая линия, движение точки называется прямолинейным.
То обстоятельство, что радиус-вектор не связан с конкретной системой координат, позволяет широко использовать векторный способ задания движения для теоретических доказательств.
Для решения практических задач обычно используют координатный и естественный способы задания движения.
При векторном способе задания движения, ускорение точки определяется как первая производная от скорости или вторая производная от радиус-вектора:
 А
А 
13. Сложное движение точки (тела) – такое движение, при котором точка (тело) одновременно участвует в нескольких движениях (напр. пассажир, перемещающийся по движущемуся вагону). В этом случае вводится подвижная система координат (Oxyz), которая совершает заданное движение относительно неподвижной (основной) системы координат (O1x1y1z1). Абсолютным движением точки назыв. движение по отношению к неподвижной системе координат. Относительное движение – движение по отношению к подвижной системе коорд. (движение по вагону). Переносное движение – движение подвижной сист. координат относительно неподвижной (движение вагона). Теорема о сложении скоростей:  ,
,  ;
;  -орты (единичные вектора) подвижной системы координат, орт вращается вокруг мгновенной оси, поэтому скорость его конца
-орты (единичные вектора) подвижной системы координат, орт вращается вокруг мгновенной оси, поэтому скорость его конца  и т.д., Þ:
и т.д., Þ:  ,
,
 ;
;  – относительная скорость.
– относительная скорость.
 ; переносная скорость:
; переносная скорость:  , поэтому абсолютная скорость точки = геометрической сумме ее переносной (ve) и относительной (vr) скоростей
, поэтому абсолютная скорость точки = геометрической сумме ее переносной (ve) и относительной (vr) скоростей  , модуль:
, модуль:  . Теорема о сложении ускорений (теорема Кориолиса):
. Теорема о сложении ускорений (теорема Кориолиса): 
 и т.д. Слагаемые выражения, определяющего ускорения
и т.д. Слагаемые выражения, определяющего ускорения  : 1)
: 1)  – ускорение полюса О;
– ускорение полюса О;
2) 
3)  – относительное ускорение точки;
– относительное ускорение точки;
4)  ,
,
получаем:  .
.
Первые три слагаемых представляют собой ускорение точки в переносном движении:  – ускорение полюса О;
– ускорение полюса О;  – вращательное уск.,
– вращательное уск.,  – осестремительное уск., т.е.
– осестремительное уск., т.е.  . Теорема о сложении ускорений (теорема Кориолиса):
. Теорема о сложении ускорений (теорема Кориолиса):  , где
, где  – ускорение Кориолиса (кориолисово ускорение) – в случае непоступательного переносного движения абсолютное ускорение = геометрической сумме переносного, относительного и кориолисова ускорений. Кориолисово ускорение характеризует: 1) изменение модуля и направления переносной скорости точки из-за ее относительного движения; 2) изменение направления относительной скорости точки из-за вращательного переносного движения. Модуль ускорения Кориолиса: ас= 2×|we×vr|×sin(we^vr), направление вектора
– ускорение Кориолиса (кориолисово ускорение) – в случае непоступательного переносного движения абсолютное ускорение = геометрической сумме переносного, относительного и кориолисова ускорений. Кориолисово ускорение характеризует: 1) изменение модуля и направления переносной скорости точки из-за ее относительного движения; 2) изменение направления относительной скорости точки из-за вращательного переносного движения. Модуль ускорения Кориолиса: ас= 2×|we×vr|×sin(we^vr), направление вектора  определяется по правилу векторного произведения, или по правилу Жуковского: проекцию относительной скорости на плоскость,
определяется по правилу векторного произведения, или по правилу Жуковского: проекцию относительной скорости на плоскость,  перпендикулярную переносной угловой скорости, надо повернуть на 90о в направлении вращения.
перпендикулярную переносной угловой скорости, надо повернуть на 90о в направлении вращения.
Кориолисово уск. = 0 в трех случаях: 1) we=0, т.е. в случае поступательного переносного движения или в момент обращения угл. скорости в 0; 2) vr=0; 3) sin(we^vr)=0, т.е. Ð(we^vr)=0, когда относительная скорость vr параллельна оси переносного вращения. В случае движения в одной плоскости – угол между vr и вектором we = 90о, sin90o=1, ас=2×we×vr.
14.ПАРАЛЛЕЛЬНЫЙ ПЕРЕНОС СИЛЫ. Силу  , не меняя действия на тело, можно перенести в любую точку пространства О, при этом добавляется присоединенная пара, момент которой
, не меняя действия на тело, можно перенести в любую точку пространства О, при этом добавляется присоединенная пара, момент которой  равен моменту силы относительно точки О (рис. 1):
равен моменту силы относительно точки О (рис. 1):
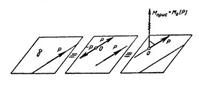
Рисунок 1.
ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К ДАННОМУ ЦЕНТРУ В ВЕКТОРНОЙ ФОРМЕ. Выполняется операция параллельного переноса со всеми силами системы. Векторы сил, перенесенных в точку О, посредством построения силового многоугольника, заменяются главным вектором системы сил  , равным их геометрической сумме (рис. 2):
, равным их геометрической сумме (рис. 2):
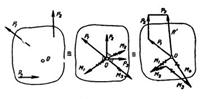
Рисунок 2.
Моменты присоединенных пар посредством построения многоугольника моментов заменяются результирующей парой, момент которой - главный момент системы  равен геометрической сумме моментов присоединенных пар (рис. 2):
равен геометрической сумме моментов присоединенных пар (рис. 2):
Таким образом, при приведении системы сил к данному центру О последняя заменяется мотором - совокупностью скользящего вектора - главного вектора и свободного вектора - главного момента .
ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ К ЦЕНТРУ В АНАЛИТИЧЕСКОЙ ФОРМЕ. Определение главного вектора системы:
проекции на оси координат:
модуль
направляющие косинусы:
Определение главного момента системы:
проекции на оси координат:
где



модуль:
направляющие косинусы:
угол между и :
линия действия равнодействующей при  :
:
где x, у, z - координаты точки на линии действия равнодействующей;
уравнение центральной оси динамы (при  ):
):
где х, y, z - координаты точки на оси динамы;
определение момента динамы:
условия приведения системы сил к паре:
условия приведения системы сил к равнодействующей:





















