

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Топ:
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного хозяйства...
Проблема типологии научных революций: Глобальные научные революции и типы научной рациональности...
Интересное:
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Метод вращений Якоби предполагает решение полной проблемы собственных значений для симметричных вещественных матриц. Для таких матриц собственные вектора образуют полную ортонормированную систему, т.е. пользуясь обозначениями, введенными в свойстве 6 предыдущего раздела, можно записать:
 ,
,  (1.4)
(1.4)
Значит, для всякой симметричной матрицы А найдется диагональная матрица  , ей ортогонально подобная. Приближенно реализовать равенство (1.4), т.е. найти сразу все собственные числа матрицы А (элементы диагонали матрицы
, ей ортогонально подобная. Приближенно реализовать равенство (1.4), т.е. найти сразу все собственные числа матрицы А (элементы диагонали матрицы  ) и все соответствующие им собственные векторы (столбцы матрицы X), позволяет применение к А последовательности однотипных преобразований, сохраняющих спектр и приводящих в пределе данную матрицу к диагональному виду.
) и все соответствующие им собственные векторы (столбцы матрицы X), позволяет применение к А последовательности однотипных преобразований, сохраняющих спектр и приводящих в пределе данную матрицу к диагональному виду.
Для этих целей используются преобразования с помощью так называемой матрицы плоских вращений:
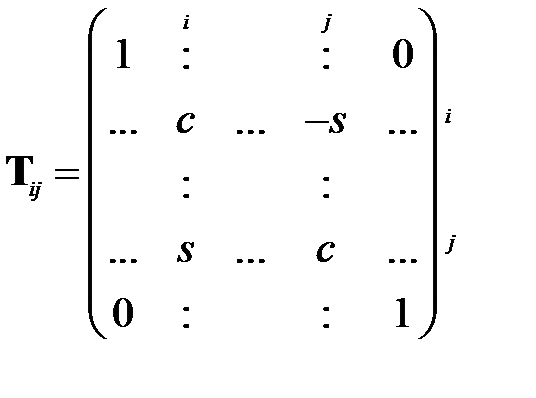 (1.5)
(1.5)
Она получается из единичной матрицы заменой двух единиц и двух нулей на пересечениях i-x и j-x строк и столбцов числами с и  , как показано в (1.5), такими, что
, как показано в (1.5), такими, что
1.  . (1.6)
. (1.6)
Условие нормировки (1.6) позволяет интерпретировать числа c и s как косинус и синус некоторого угла  , и, так как умножение любой матрицы на матрицу
, и, так как умножение любой матрицы на матрицу  изменяет у нее только две строки и два столбца по формулам поворота на угол
изменяет у нее только две строки и два столбца по формулам поворота на угол  в плоскости, отделяемой выбранной парой индексов i и j, то это объясняет название матрицы
в плоскости, отделяемой выбранной парой индексов i и j, то это объясняет название матрицы  .
.
Матрица  ортогональна при любых
ортогональна при любых  , и значит, матрица
, и значит, матрица
 (1.7)
(1.7)
подобна А, т.е. имеет тот же набор собственных чисел, что и матрица А.
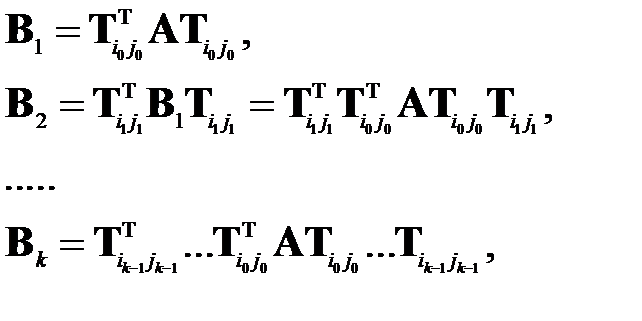
Классический итерационный метод вращений, предложенный Якоби (1846 г.), предполагает построение последовательности матриц

с помощью преобразований типа (1.7)
 (1.8)
(1.8)
такой, что на  -м шаге обнуляется максимальный по модулю элемент матрицы
-м шаге обнуляется максимальный по модулю элемент матрицы  предыдущего шага (а значит, и симметричный ему элемент). Эта стратегия определяет способ фиксирования пары индексов i, j, задающих позиции
предыдущего шага (а значит, и симметричный ему элемент). Эта стратегия определяет способ фиксирования пары индексов i, j, задающих позиции  ,
,  ,
,  ,
,  «существенных» элементов в матрице вращения
«существенных» элементов в матрице вращения  , и угол поворота
, и угол поворота  , конкретизирующий значения этих элементов:.
, конкретизирующий значения этих элементов:.  .и
.и  . На каждом шаге таких преобразований пересчитываются только две строки (или два столбца, что неважно в силу симметрии) матрицы предыдущего шага.
. На каждом шаге таких преобразований пересчитываются только две строки (или два столбца, что неважно в силу симметрии) матрицы предыдущего шага.
|
|
Пусть 
 – исходная симметричная матрица, а
– исходная симметричная матрица, а 
 – матрица, получающаяся после одного шага преобразований по формуле (1.7). Обозначим через
– матрица, получающаяся после одного шага преобразований по формуле (1.7). Обозначим через  и
и  двумерные подматрицы этих матриц, определяемые фиксированием позиции
двумерные подматрицы этих матриц, определяемые фиксированием позиции  некоторого элемента
некоторого элемента  матрицы
матрицы  :
:
 ,
,  ,
,
а через  – такую же подматрицу матрицы
– такую же подматрицу матрицы  :
:
 .
.
Очевидно, что равенство (1.7), записанное для матриц А, В,  , будет верным и для их подматриц
, будет верным и для их подматриц  ,
,  ,
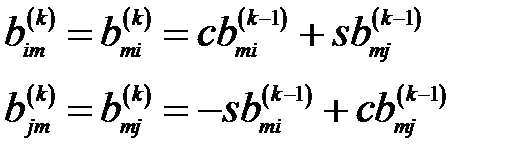
,  . Рассчитаем с его помощью элементы матрицы
. Рассчитаем с его помощью элементы матрицы  :
:

 .
.
Очевидно, что  , если
, если  т.е. если
т.е. если
 .
.
Учитывая тригонометрическую интерпретацию чисел  и
и  , в соответствии с чем можно считать
, в соответствии с чем можно считать
 ,
,  ,
,
приходим к выводу, что матрица В будет иметь нулевые внедиагональные элементы  , если использовать преобразование плоского вращения по формуле (1.7) на угол
, если использовать преобразование плоского вращения по формуле (1.7) на угол  такой, что
такой, что
 .
.
(для определенности считают  ).
).
Находить непосредственно угол  нет необходимости, поскольку нужные для выполнения преобразований числа с и s можно получить через значение
нет необходимости, поскольку нужные для выполнения преобразований числа с и s можно получить через значение  . На этой стадии метода предъявляются наибольшие требования к точности, так как искажение с и s нарушает ортогональность матриц Т, что ведет к неустранимым погрешностям (метод вращений, итерационный по форме, не является итерационным по существу: ему не присуща самоисправляемость методов последовательных приближений).
. На этой стадии метода предъявляются наибольшие требования к точности, так как искажение с и s нарушает ортогональность матриц Т, что ведет к неустранимым погрешностям (метод вращений, итерационный по форме, не является итерационным по существу: ему не присуща самоисправляемость методов последовательных приближений).
Нужно отметить, что описанный подход к решению полной проблемы собственных значений эффективен и тогда, когда исходная матрица имеет кратные и, что хуже, близкие собственные числа.
Пользуясь проделанными рассуждениями, запишем последовательность действий, определяющих один шаг метода вращений Якоби (каждый шаг состоит в расчёте матрицы  на основе
на основе  при помощи соотношения (1.8)):
при помощи соотношения (1.8)):
|
|
1. Выбирается ключевой элемент  матрицы
матрицы  (стратегия его выбора рассматривается ниже).
(стратегия его выбора рассматривается ниже).
2. Вычисляется  ,
,  ,
,  .
.
3. Вычисляются значения  и
и  : Если
: Если  то
то  ,
,  ,
,  (если
(если  то лучше
то лучше  ), если же q =0, то
), если же q =0, то  .
.
4. Вычисляются новые диагональные элементы матрицы  :
:
5. Внедиагональные элементы  и
и  полагаются равными 0 (для контроля точности их значения можно вычислить по формуле:
полагаются равными 0 (для контроля точности их значения можно вычислить по формуле:  );
);
6. При  таких, что
таких, что  ,
,  вычисляются изменяющиеся внедиагональные элементы:
вычисляются изменяющиеся внедиагональные элементы:
7. Для всех остальных пар индексов  принимается
принимается 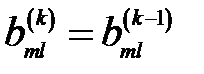 .
.
Вернёмся теперь к стратегии выбора ключевого элемента  . На практике наиболее распространены два подхода:
. На практике наиболее распространены два подхода:
1. Классический, при котором в качестве ключевого элемента, определяющего индексы  и
и  , принимается максимальный по модулю элемент матрицы
, принимается максимальный по модулю элемент матрицы  :
:
 .
.
В [1] показано, что при таком способе выбора ключевого элемента последовательность подобных матриц  сходится к диагональной матрице
сходится к диагональной матрице  из собственных значений со скоростью геометрической прогрессии. Однако при больших величинах n его реализация наталкивается на существенные потери машинных ресурсов, связанные с поиском наибольшего по модулю ключевого элемента.
из собственных значений со скоростью геометрической прогрессии. Однако при больших величинах n его реализация наталкивается на существенные потери машинных ресурсов, связанные с поиском наибольшего по модулю ключевого элемента.
2. Метод барьеров. Стратегия выбора ключевого элемента здесь такова: устраивается циклический перебор всех над- или поддиагональных элементов матрицы  , но при этом пропускаются элементы, абсолютные величины которых меньше некоторого заданного положительного числа – барьера. Этот барьер может быть переменным (уменьшающимся по какому-либо осмысленному принципу). Сходимость метода несколько медленней, чем при классическом способе, но существенный выигрыш в быстродействии при выборе ключевого элемента оправдывает его практическое применение.
, но при этом пропускаются элементы, абсолютные величины которых меньше некоторого заданного положительного числа – барьера. Этот барьер может быть переменным (уменьшающимся по какому-либо осмысленному принципу). Сходимость метода несколько медленней, чем при классическом способе, но существенный выигрыш в быстродействии при выборе ключевого элемента оправдывает его практическое применение.
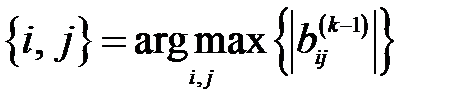
В завершение, остается вспомнить, что в соответствии со свойствами 6, 7 из предыдущего раздела и проведенными рассуждениями за собственные векторы  ,
,  , …,
, …,  матрицы А (имеющие единичную евклидову норму) могут быть приближенно приняты столбцы результирующей матрицы, получающейся справа от А в цепочке преобразований подобия:
матрицы А (имеющие единичную евклидову норму) могут быть приближенно приняты столбцы результирующей матрицы, получающейся справа от А в цепочке преобразований подобия:
т.е. матрицы  при некотором
при некотором  .
.
Критерием окончания процесса вращений Якоби может служить, например, достаточная малость модуля ключевого элемента на  -ом шаге:
-ом шаге:  , где
, где  – некоторое малое число, определяющее допустимую погрешность вычислений метода.
– некоторое малое число, определяющее допустимую погрешность вычислений метода.
|
|
Литература
1. Амелькин Н.И. Кинематика и динамика твердого тела (кватернионное изложение). – М.: МФТИ (ГУ), 2000. – 64 с.
2. Бесекерский В. А., Попов Е.П. Теория Систем автоматического управления. – Изд. 4-е, перераб. и доп. – Спб.: Профессия, 2003. – 752 с.
3. Бобронников В. Т., Красильщиков М. Н., Козорез Д. А. и др. Статистическая динамика и оптимизация управления летательных аппаратов: учебное пособие. / Под общ. ред. М. Н. Красильщикова, В. В. Малышева. – Изд. 2-е, перераб. и доп. – М.: Альянс, 2013. – 468 с.
4. Бранец В. Н., Шмыглевский И. П. Применение кватернионов в задачах ориентации твердого тела. – М.: Наука, 1973. – 320 с.
5. Вержбицкий В.М. Основы численных методов: Учебник для вузов. – М.: Высшая школа, 2002. – 840 с.
6. Желтов С.Ю., Веремеенко К.К., Ким Н.В. и др. Современные информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов. / Под ред. М.Н. Красильщикова, Г.Г. Себрякова. – М.: ФИЗМАТЛИТ, 2009. – 556 с.
7. Осипов Д.Л. – Delphi. Программирование для Windows, OS X, iOS и Android. – Спб.: БХВ-Петербург, 2014. – 464 с.
8. Рашевский П. К. Риманова геометрия и тензорный анализ. – М.: Наука, 1967. – 664 с.
9. Страуструп Б. Программирование: принципы и практика с использованием С++. – Второе издание. – М.: Вильямс, 2016. – 1328 с.
10. Умнов А. Е., Аналитическая геометрия и линейная алгебра: учебное пособие. – 3-е изд., испр. и доп. – М.: МФТИ, 2011. – 554 с.
11. Элджер Дж. С++: Библиотека программиста. – Спб.: Питер, 1999. – 320 с.
[1] Более подробно основные понятия и определения линейной алгебры рассматриваются, например, в [10].
[2] Строго говоря, такая интерпретация допустима и для  -мерного однородного гиперпространства, но в задачах моделирования процессов функционирования интегрированных систем ЛА такое обобщение, как правило, излишне.
-мерного однородного гиперпространства, но в задачах моделирования процессов функционирования интегрированных систем ЛА такое обобщение, как правило, излишне.
|
|
|

Двойное оплодотворение у цветковых растений: Оплодотворение - это процесс слияния мужской и женской половых клеток с образованием зиготы...

Автоматическое растормаживание колес: Тормозные устройства колес предназначены для уменьшения длины пробега и улучшения маневрирования ВС при...

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Архитектура электронного правительства: Единая архитектура – это методологический подход при создании системы управления государства, который строится...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!