Структурная схема системы представлена в графической части. Частотный преобразователь имеет множество регистров. Каждый регистр (или несколько регистров) отвечает за определенную функцию и хранит в себе значение параметра, например регистр 1-20 хранит в себе номинальное значение напряжения двигателя и участвует в формировании математической модели подключенного двигателя. В регистры можно записывать значение параметров, либо считывать их. В некоторые регистры нельзя записывать значение, а можно только считывать их, например это регистры, отображающие текущие состояние двигателя: слово состояния, напряжение, ток и частота двигателя. Исходя из значений параметров, заложенных в регистры, частотный преобразователь формирует управляющие сигналы и посылает их на двигатель, кроме этого частотный преобразователь считывает некоторые параметры двигателя и записывает их в соответствующие регистры.
Так как частотный преобразователь соединен с ПК при помощи интерфейса RS-485, мы имеем возможность удаленно осуществлять мониторинг состояния двигателя и формировать управляющее воздействия. Другими словами мы можем считывать значение параметров из регистров, а так же осуществлять запись. Для этого мы пользуемся открытым коммуникационным протоколом Modbus, а именно стандартом Modbus RTU, который поддерживает данным частотным преобразователем. ПК является устройством-ведущим (master), преобразователь – ведомым-устройством (slave). Master осуществляет опрос устройства slave c определенным интервалом времени, например раз в секунду. Данная технология широко применяется в промышленности для организации связи между электронными устройствами. Может использоваться для передачи данных через последовательные линии связи RS-485, RS-422, RS-232.
Так как LabVIEW содержит множество библиотек для создания программ, она способна работать с протоколом Modbus напрямую, без использования стороннего программного обеспечения, так как имеется готовая библиотека компонентов. Используя эту и другие библиотеки LabVIEW, мы имеем возможность построить пользовательский интерфейс, который позволит осуществлять отображение состояния двигателя и формировать управляющие воздействия.
Примеры опроса регистров
В данной главе будут приведены примеры считывания из регистров и записи в них определенных значений.
1. Управление двигателем (пример записи):
Управление двигателем осуществляется с помощью регистра командного слова, имеющим адрес 49999 в десятичной системе счисления. Этот регистр состоит из 16 битов, каждый отвечает за определённую функцию. Ниже представлена таблица, в которой указаны эти функции.
Таблица 14. Биты командного слова.
| Бит
| Логическое состояние бита
|
|
|
|
|
| Предустановленное задание, младший бит
|
|
|
|
|
| Предустановленное задание, старший бит
|
|
|
|
|
| Торможение постоянным током
| Нет торможения постоянным током
|
|
| Останов выбегом
| Нет останова выбегом
|
|
| Быстрый останов
| Нет быстрого останова
|
|
| Фиксация частоты
| Нет фиксации частоты
|
|
| Останов с замедлением
| Пуск
|
|
| Нет сброса
| Сброс
|
Продолжение таблицы 14.
|
| Работа по заданию
| Фиксированная частота
|
|
| Изменение скорости 1
| Изменение скорости 2
|
|
| Данные недействительны
| Данные действительны
|
|
| Реле 1 выключено
| Реле 1 включено
|
| 12-13
| Не используются
|
|
| Активен НАБОР1
| Активен НАБОР2
|
|
| Нет реверса
| Реверс
|
Следовательно, изменяя значение нужных битов можно получать различные командные слова. Командные слова задаются в десятичной системе счисления. Ниже приведены примеры:
а) 00000100011111002= 114810 – пуск двигателя в прямом направлении;
б) 10000100011111002=3391610 – пуск двигателя в обратном направлении;
в) 10000100001010002=3383210 – быстрый останов;
г) 10000100001100002=3384010 – останов свободным выбегом;
и т. д.
За задание частоты отвечает другой регистр, имеющий адрес 50009. Частота задается десятичным числом от 0 до 16384.
На рисунке ниже представлена реализация схемы задания командного слова, частоты и места управления (цифровое задание, задание с помощью командного слова, либо комбинированное). Перед опросом регистров необходимо проинициализировать порт, то есть необходимо задать: имя порта, стандарт Modbus, скорость передачи, контроль четности, скорость опроса, а также таймаут. После этого используется специальная функция из библиотеки Modbus, в ней указывается адрес регистра, данные, которые необходимо записать, информация о порте, а так же информация об устройстве, куда нужно выполнить запись (его адрес и стандарт Modbus). Параметры в регистре хранятся в виде массива, то есть перед записью необходимо выбрать преобразование данных.
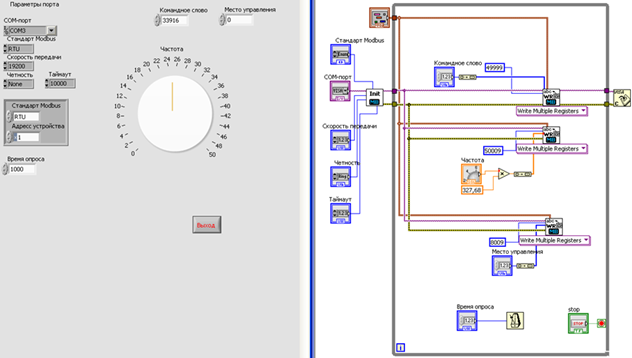
Рис. 9 – Схема записи данных в регистры.
2. Слово состояния (пример считывания):
Слово состояния – особый регистр, который хранит текущее состояние электропривода. Он имеет адрес 500199 в десятичной системе счисления. Как и регистр командного слова, он состоит из нескольких бит, каждый из которых отвечает за определенную функцию. Ниже представлена таблица, в которой указаны эти функции.
Таблица 15. Биты слова состояния.
| Бит
| Логическое состояние бита
|
|
|
|
|
| Управление не готово
| Готовность к управлению
|
|
| Привод не готов
| Привод готов
|
|
| Останов выбегом
| Нет останова выбегом
|
|
| Нет аварийного сигнала
| Аварийный сигнал
|
| 4-6
| Не используются
|
|
| Нет предупреждения
| Предупреждение
|
|
| Не на задании (например, разгон)
| На задании
|
|
| Ручной режим
| автоматический режим
|
|
| Вне частотного диапазона
| В частотном диапазоне
|
|
| Остановлен
| Работа
|
|
| Не используется
|
Продолжение таблицы 15.
|
| Нет предупреждения о напряжении
| Предупреждение о напряжении
|
|
| Не на пределе по току
| Предел по току
|
|
| Нет предупреждения о перегреве
| Предупреждение о перегреве
|
При изменении состояния привода регистр состояния меняет свое значение. Это можно отследить с помощью считывания данных из регистра.
Схема считывания данных из регистра представлена ниже. Как и в случаи записи, необходимо проинициализировать порт, далее выбирается специальная функция из библиотеки Modbus. В ней указывается начальный адрес регистра, количество регистров, которые необходимо считать (некоторые параметры, например частота, хранятся в нескольких регистрах). Для правильного отображения данных необходимо выполнить преобразование, так как, в некоторых параметрах по умолчанию смещено положение десятичной точки, для того чтобы осуществлять передачу в формате регистра, например значение регистра 16-13, равное 504, указывает на частоту привода 50,4 Гц. В случаи со словом состояния его удобно преобразовать в логический массив для более понятно отображения данных.
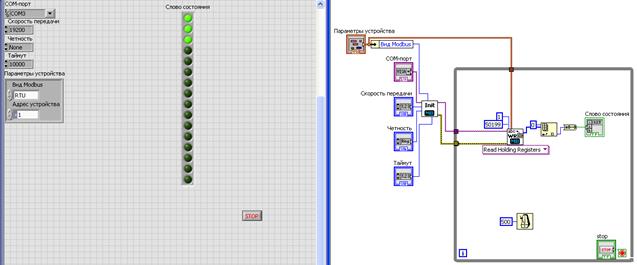
Рис. 10 – Схема считывания данных из регистров.
Для того чтобы определить адрес нужного нам регистра необходимо воспользоваться простым правилом: Адрес соответствующего регистра определяется по номеру параметра в ПЧВ3 по следующей формуле:
АДРЕС = НОМЕР _ РЕГИСТРА х НОМЕР _ ПАРАМЕТРАх10 -1
Заключение
В ходе курсового проекта проведен детальный расчет регулируемого электропривода производственной установки с двигателем переменного тока в системе ПЧ-АД. Произведены все необходимые вычисления, а так же построены требуемые характеристики. Получены навыки анализа данных о режимах нагрузки, построения нагрузочных диаграмм механизма, оценки энергетических показателей спроектированной системы, выбора электрических машин и преобразовательных устройств с учетом требований технологического процесса.
Описана разработка концепции системы мониторинга состояния и управления асинхронным двигателем на базе частотного преобразователя ОВЕН ПЧВ3 и графической среды разработки LabVIEW. Описан принцип построения программного продукта, технология работы с данными, принцип адресации регистров.
Список литературы
1. Д. А. Даденков, Методическое руководство к выполнению курсового проекта по дисциплине «Электрический привод», Пермь 2016 г. – 48с.
2. Н. Т. Мазунин, Методика пособие расчетов характеристик и параметров
электромеханических систем, Пермь 2000 г. – 30 с.
3. Д. А. Даденков, Электрический привод. Конспект лекций для студентов, Пермь 2016 г. – 131с.
4. А.Ю. Чернышев, Н.В. Кояин. Проектирование электрических приводов: Учебно - метод. пособие. - Томск: Издательство ТПУ, 2005. - 120 с.
5. Р.Ф. Бекишев, Ю.Н. Дементьев. Общий курс электропривода: Учебное пособие. - Томск: Издательство НИ ТПУ, 2010. - 302с.
6. [Электронный ресурс]. – URL: https://ru.wikipedia.org/
7. [Электронный ресурс]. – URL: https:// www.owen.ru/
Графическая часть






