Аннотация
Целью курсового проекта является детальный расчет регулируемого электропривода производственной установки с двигателем переменного тока в системе ПЧ-АД.
При выполнении курсовой работы производится анализ данных о режимах нагрузки, построении нагрузочных диаграмм механизма, выбираются электрические машины и преобразовательные устройства с учетом требований технологического процесса, рассчитываются параметры и выбираются элементы заданной системы электропривода, оцениваются энергетические показатели спроектированной системы.
Данный курсовой проект отражает механику электромеханической системы ПЧ-АД и электромеханические свойства двигателя и представляется в виде расчетно-пояснительной записки, включающей в себя заданные и расчетные графики, диаграммы, тип выбранного двигателя и преобразователя, характеристики системы электропривода, а также принципиальную схему спроектированной системы.
В ней приводятся все необходимые расчеты (мощности приводного двигателя по заданной тахограмме и механической характеристике механизма, выбор двигателя и преобразовательного устройства, расчет и построение механических характеристик электропривода, расчет энергетики).
Задание на курсовое проектирование
Рассчитать регулируемый электропривод производственной установки с двигателем переменного тока в системе ПЧ-АД по заданному варианту тахограммы, закону изменения момента сопротивления (нагрузки) механизма и значения момента инерции механизма в долях от момента инерции выбранного приводного двигателя. Исходные данные рабочей машины указаны в таблице 1.
Таблица 1 Исходные данные
| ω1, рад/с
| ω2, рад/с
| ω3, рад/с
| t1,c
| t2,c
| t3,c
| t0,c
| Мсм, Н*м
| Jм, кг*м2
|
|
|
|
|
|
|
|
| 1600-40*ω
| 3,5
|
Введение.
В данном курсовом проекте представлен расчет регулируемый электропривод производственной установки с двигателем переменного тока в системе ПЧ-АД.
Асинхронные приводы нашли применение во всех сферах нашей жизни. Впервые конструкция трёхфазного асинхронного двигателя была разработана, создана и опробована нашим русским инженером М. О. Доливо-Добровольским в 1889-91 годах. Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. На выставке было представлено три трёхфазных двигателя разной мощности. Самый мощный из них имел мощность 1.5 кВт и использовался для приведения во вращение генератора постоянного тока. Конструкция асинхронного двигателя, предложенная Доливо-Добровольским, оказалась очень удачной и является основным видом конструкции этих двигателей до настоящего времени.
Асинхронный двигатель состоит из неподвижной части, называемой статором, и подвижной – ротора. Различают два вида асинхронных двигателей – с фазным ротором и короткозамкнутым ротором. Как видно из названий они отличаются конструкцией ротора.
В первом случаи обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь. Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины.
Во втором случаи обмотка ротора состоит из стержней, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки”. Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов. В настоящее время чаще всего применяются асинхронные двигатели с короткозамкнутым ротором
Данный вид электрических машин по всем параметрам превосходит двигатели постоянного тока, обладая более высокими показателями надежности, низкой стоимостью, простотой конструкции. До недавнего времени асинхронные двигатели мало применялись в промышленных приводах из-за сложностей в регулировании скорости, так как нельзя было осуществлять плавное регулирование частоты вращения, существовало всего несколько ступеней скоростей, а их переключение требовало существенных усилий. Однако с появлением современных преобразователей частоты эта проблема была решена, и асинхронный привод стал повсеместно вытеснять двигатели постоянного тока. В настоящее время на большинстве производств используется регулируемый асинхронный привод.
Во время расчета курсового проекта предполагается использовать современный зарубежный частотный преобразователь Danfoss, который обладает высокой надежностью, простотой использования, а так же большим функционалом для решения любых поставленных задач.
Тахограмма рабочей машины
Тахограмму рабочей машины  строится по данным табл. 1. В ней указаны три установившиеся скорости
строится по данным табл. 1. В ней указаны три установившиеся скорости  ,
,  ,
,  и время t 1, t 2, t 3 работы с этими скоростями, а также время паузы t 0.
и время t 1, t 2, t 3 работы с этими скоростями, а также время паузы t 0.
Расчетное ПВ%расч определяется как:

 ,1/с ,1/с
| |
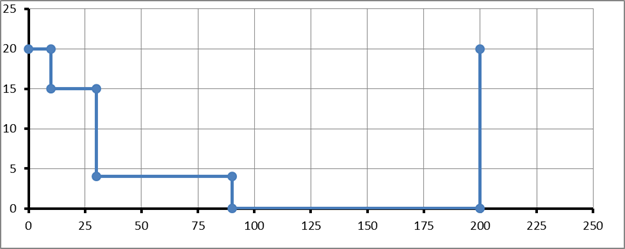
Рис 1. - Тахограмма рабочей машины
Тахограмма работы двигателя
Тахограмма ω = f (t) работы двигателя с установившимся скоростями строится по тахограмме рабочей машины и передаточному числу редуктора.
| ,1/с
| |
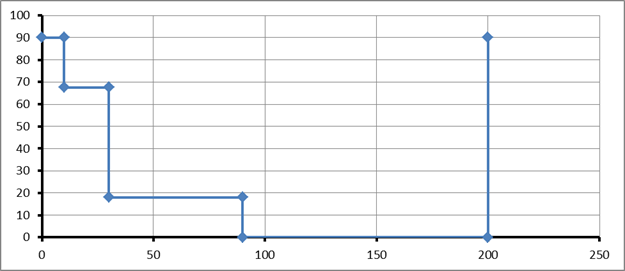
Рис 4. – Тахограмма работы двигателя
Описание учебного стенда
Схема стенда представлена в графической части. Стенд состоит из частотного преобразователя ОВЕН ПЧВ3-2К2-В, асинхронного двигателя с короткозамкнутым ротором мощностью 1,5 кВт, потенциометра, одноканального цифрового измерителя ОВЕН ИДЦ1, калибратора токовой петли ОВЕН РЗУ-420 и пары двухпозиционных переключателей.
Преобразователь частоты векторный ОВЕН ПЧВ3 предназначен для управления асинхронными электродвигателями насосов и вентиляторов в промышленности, жилищно-коммунальном и сельском хозяйстве, на транспорте, а также в других областях, в том числе подконтрольных органам Ростехнадзора. Преобразователь частоты векторный ПЧВ3 соответствует требованиям ГОСТ Р 52931. Прибор предназначен для работы со всеми стандартными трехфазными асинхронными двигателями в большинстве существующих промышленных механизмов, в диапазоне мощностей от 0,25 до 90 кВт.
Прибор обеспечивает выполнение ряда функций, таких как:
1) Частотный(F) или векторный(V) алгоритм управления двигателем.
2) Автоматическая адаптация (ААД) асинхронного двигателя.
3) Диагностика частотного преобразователя и нагрузки.
4) Защитное отключение по напряжению, току, температуре.
5) Предупредительная и аварийная сигнализация.
6) Выбор источника управления (аналоговые/дискретные входы и RS-485)
7) Ручное и автоматическое управление.
8) Управление по интерфейсу RS-485.
9) Встроенный ПЛК.
10) Прямое и реверсное вращение вала.
и др.
Более подробную информацию о преобразователе частоты можно найти в руководствах на официальном сайте.
Цифровой измеритель ОВЕН ИДЦ1 предназначен для измерения и регулирования различных физических величин, значение которых внешним датчиком может быть преобразовано в сигналы постоянного тока или напряжения. Прибор может быть использован для измерения и регулирования технологических процессов в различных отраслях промышленности, коммунального и сельского хозяйства. В нашем случае прибор может быть использован для отображения текущей частоты вращения асинхронного двигателя, либо тока.
Задание частоты может осуществляться 4 способами:
· С помощью панели оператора преобразователя частоты.
· С помощью потенциометра, который подключен к аналоговому входу частотного преобразователя и работает с унифицированным сигналом 0-10 В.
· С помощью калибратора токовой петли ОВЕН РЗУ-420, который также как и потенциометр подключен к аналоговому входу, но работает с унифицированным сигналом 4-20 мА.
· Удаленно, с помощью интерфейса RS-485.
Стенд имеет подключение к ПК, так как частотный преобразователь имеет интерфейс RS-485. Для прямого подключение к USB порту используется преобразователь интерфейсов ОВЕН АС4, который предназначен для взаимного преобразования сигналов интерфейсов USB и RS-485. Преобразователь позволяет подключать к промышленной информационной сети RS-485 персональный компьютер, имеющий USB-порт.
Примеры опроса регистров
В данной главе будут приведены примеры считывания из регистров и записи в них определенных значений.
1. Управление двигателем (пример записи):
Управление двигателем осуществляется с помощью регистра командного слова, имеющим адрес 49999 в десятичной системе счисления. Этот регистр состоит из 16 битов, каждый отвечает за определённую функцию. Ниже представлена таблица, в которой указаны эти функции.
Таблица 14. Биты командного слова.
| Бит
| Логическое состояние бита
|
|
|
|
|
| Предустановленное задание, младший бит
|
|
|
|
|
| Предустановленное задание, старший бит
|
|
|
|
|
| Торможение постоянным током
| Нет торможения постоянным током
|
|
| Останов выбегом
| Нет останова выбегом
|
|
| Быстрый останов
| Нет быстрого останова
|
|
| Фиксация частоты
| Нет фиксации частоты
|
|
| Останов с замедлением
| Пуск
|
|
| Нет сброса
| Сброс
|
Продолжение таблицы 14.
|
| Работа по заданию
| Фиксированная частота
|
|
| Изменение скорости 1
| Изменение скорости 2
|
|
| Данные недействительны
| Данные действительны
|
|
| Реле 1 выключено
| Реле 1 включено
|
| 12-13
| Не используются
|
|
| Активен НАБОР1
| Активен НАБОР2
|
|
| Нет реверса
| Реверс
|
Следовательно, изменяя значение нужных битов можно получать различные командные слова. Командные слова задаются в десятичной системе счисления. Ниже приведены примеры:
а) 00000100011111002= 114810 – пуск двигателя в прямом направлении;
б) 10000100011111002=3391610 – пуск двигателя в обратном направлении;
в) 10000100001010002=3383210 – быстрый останов;
г) 10000100001100002=3384010 – останов свободным выбегом;
и т. д.
За задание частоты отвечает другой регистр, имеющий адрес 50009. Частота задается десятичным числом от 0 до 16384.
На рисунке ниже представлена реализация схемы задания командного слова, частоты и места управления (цифровое задание, задание с помощью командного слова, либо комбинированное). Перед опросом регистров необходимо проинициализировать порт, то есть необходимо задать: имя порта, стандарт Modbus, скорость передачи, контроль четности, скорость опроса, а также таймаут. После этого используется специальная функция из библиотеки Modbus, в ней указывается адрес регистра, данные, которые необходимо записать, информация о порте, а так же информация об устройстве, куда нужно выполнить запись (его адрес и стандарт Modbus). Параметры в регистре хранятся в виде массива, то есть перед записью необходимо выбрать преобразование данных.
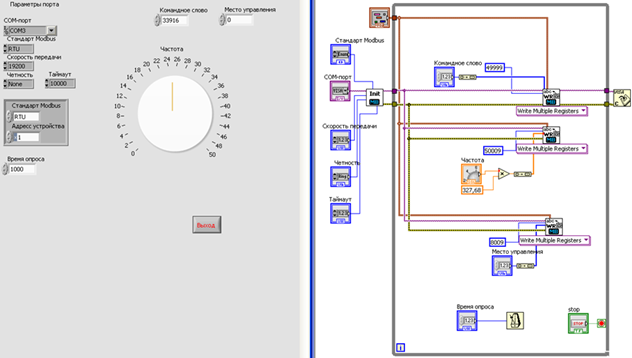
Рис. 9 – Схема записи данных в регистры.
2. Слово состояния (пример считывания):
Слово состояния – особый регистр, который хранит текущее состояние электропривода. Он имеет адрес 500199 в десятичной системе счисления. Как и регистр командного слова, он состоит из нескольких бит, каждый из которых отвечает за определенную функцию. Ниже представлена таблица, в которой указаны эти функции.
Таблица 15. Биты слова состояния.
| Бит
| Логическое состояние бита
|
|
|
|
|
| Управление не готово
| Готовность к управлению
|
|
| Привод не готов
| Привод готов
|
|
| Останов выбегом
| Нет останова выбегом
|
|
| Нет аварийного сигнала
| Аварийный сигнал
|
| 4-6
| Не используются
|
|
| Нет предупреждения
| Предупреждение
|
|
| Не на задании (например, разгон)
| На задании
|
|
| Ручной режим
| автоматический режим
|
|
| Вне частотного диапазона
| В частотном диапазоне
|
|
| Остановлен
| Работа
|
|
| Не используется
|
Продолжение таблицы 15.
|
| Нет предупреждения о напряжении
| Предупреждение о напряжении
|
|
| Не на пределе по току
| Предел по току
|
|
| Нет предупреждения о перегреве
| Предупреждение о перегреве
|
При изменении состояния привода регистр состояния меняет свое значение. Это можно отследить с помощью считывания данных из регистра.
Схема считывания данных из регистра представлена ниже. Как и в случаи записи, необходимо проинициализировать порт, далее выбирается специальная функция из библиотеки Modbus. В ней указывается начальный адрес регистра, количество регистров, которые необходимо считать (некоторые параметры, например частота, хранятся в нескольких регистрах). Для правильного отображения данных необходимо выполнить преобразование, так как, в некоторых параметрах по умолчанию смещено положение десятичной точки, для того чтобы осуществлять передачу в формате регистра, например значение регистра 16-13, равное 504, указывает на частоту привода 50,4 Гц. В случаи со словом состояния его удобно преобразовать в логический массив для более понятно отображения данных.
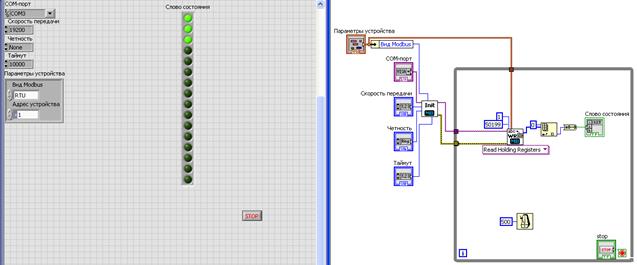
Рис. 10 – Схема считывания данных из регистров.
Для того чтобы определить адрес нужного нам регистра необходимо воспользоваться простым правилом: Адрес соответствующего регистра определяется по номеру параметра в ПЧВ3 по следующей формуле:
АДРЕС = НОМЕР _ РЕГИСТРА х НОМЕР _ ПАРАМЕТРАх10 -1
Заключение
В ходе курсового проекта проведен детальный расчет регулируемого электропривода производственной установки с двигателем переменного тока в системе ПЧ-АД. Произведены все необходимые вычисления, а так же построены требуемые характеристики. Получены навыки анализа данных о режимах нагрузки, построения нагрузочных диаграмм механизма, оценки энергетических показателей спроектированной системы, выбора электрических машин и преобразовательных устройств с учетом требований технологического процесса.
Описана разработка концепции системы мониторинга состояния и управления асинхронным двигателем на базе частотного преобразователя ОВЕН ПЧВ3 и графической среды разработки LabVIEW. Описан принцип построения программного продукта, технология работы с данными, принцип адресации регистров.
Список литературы
1. Д. А. Даденков, Методическое руководство к выполнению курсового проекта по дисциплине «Электрический привод», Пермь 2016 г. – 48с.
2. Н. Т. Мазунин, Методика пособие расчетов характеристик и параметров
электромеханических систем, Пермь 2000 г. – 30 с.
3. Д. А. Даденков, Электрический привод. Конспект лекций для студентов, Пермь 2016 г. – 131с.
4. А.Ю. Чернышев, Н.В. Кояин. Проектирование электрических приводов: Учебно - метод. пособие. - Томск: Издательство ТПУ, 2005. - 120 с.
5. Р.Ф. Бекишев, Ю.Н. Дементьев. Общий курс электропривода: Учебное пособие. - Томск: Издательство НИ ТПУ, 2010. - 302с.
6. [Электронный ресурс]. – URL: https://ru.wikipedia.org/
7. [Электронный ресурс]. – URL: https:// www.owen.ru/
Графическая часть
Аннотация
Целью курсового проекта является детальный расчет регулируемого электропривода производственной установки с двигателем переменного тока в системе ПЧ-АД.
При выполнении курсовой работы производится анализ данных о режимах нагрузки, построении нагрузочных диаграмм механизма, выбираются электрические машины и преобразовательные устройства с учетом требований технологического процесса, рассчитываются параметры и выбираются элементы заданной системы электропривода, оцениваются энергетические показатели спроектированной системы.
Данный курсовой проект отражает механику электромеханической системы ПЧ-АД и электромеханические свойства двигателя и представляется в виде расчетно-пояснительной записки, включающей в себя заданные и расчетные графики, диаграммы, тип выбранного двигателя и преобразователя, характеристики системы электропривода, а также принципиальную схему спроектированной системы.
В ней приводятся все необходимые расчеты (мощности приводного двигателя по заданной тахограмме и механической характеристике механизма, выбор двигателя и преобразовательного устройства, расчет и построение механических характеристик электропривода, расчет энергетики).
Задание на курсовое проектирование
Рассчитать регулируемый электропривод производственной установки с двигателем переменного тока в системе ПЧ-АД по заданному варианту тахограммы, закону изменения момента сопротивления (нагрузки) механизма и значения момента инерции механизма в долях от момента инерции выбранного приводного двигателя. Исходные данные рабочей машины указаны в таблице 1.
Таблица 1 Исходные данные
| ω1, рад/с
| ω2, рад/с
| ω3, рад/с
| t1,c
| t2,c
| t3,c
| t0,c
| Мсм, Н*м
| Jм, кг*м2
|
|
|
|
|
|
|
|
| 1600-40*ω
| 3,5
|
Введение.
В данном курсовом проекте представлен расчет регулируемый электропривод производственной установки с двигателем переменного тока в системе ПЧ-АД.
Асинхронные приводы нашли применение во всех сферах нашей жизни. Впервые конструкция трёхфазного асинхронного двигателя была разработана, создана и опробована нашим русским инженером М. О. Доливо-Добровольским в 1889-91 годах. Демонстрация первых двигателей состоялась на Международной электротехнической выставке во Франкфурте на Майне в сентябре 1891 года. На выставке было представлено три трёхфазных двигателя разной мощности. Самый мощный из них имел мощность 1.5 кВт и использовался для приведения во вращение генератора постоянного тока. Конструкция асинхронного двигателя, предложенная Доливо-Добровольским, оказалась очень удачной и является основным видом конструкции этих двигателей до настоящего времени.
Асинхронный двигатель состоит из неподвижной части, называемой статором, и подвижной – ротора. Различают два вида асинхронных двигателей – с фазным ротором и короткозамкнутым ротором. Как видно из названий они отличаются конструкцией ротора.
В первом случаи обмотка выполняется трёхфазной, аналогично обмотке статора, с тем же числом пар полюсов. Витки обмотки закладываются в пазы сердечника ротора и соединяются по схеме звезда. Концы каждой фазы соединяются с контактными кольцами, закреплёнными на валу ротора, и через щётки выводятся во внешнюю цепь. Контактные кольца изготавливают из латуни или стали, они должны быть изолированы друг от друга и от вала. В качестве щёток используют металлографитовые щётки, которые прижимаются к контактным кольцам с помощью пружин щёткодержателей, закреплённых неподвижно в корпусе машины.
Во втором случаи обмотка ротора состоит из стержней, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки”. Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов. В настоящее время чаще всего применяются асинхронные двигатели с короткозамкнутым ротором
Данный вид электрических машин по всем параметрам превосходит двигатели постоянного тока, обладая более высокими показателями надежности, низкой стоимостью, простотой конструкции. До недавнего времени асинхронные двигатели мало применялись в промышленных приводах из-за сложностей в регулировании скорости, так как нельзя было осуществлять плавное регулирование частоты вращения, существовало всего несколько ступеней скоростей, а их переключение требовало существенных усилий. Однако с появлением современных преобразователей частоты эта проблема была решена, и асинхронный привод стал повсеместно вытеснять двигатели постоянного тока. В настоящее время на большинстве производств используется регулируемый асинхронный привод.
Во время расчета курсового проекта предполагается использовать современный зарубежный частотный преобразователь Danfoss, который обладает высокой надежностью, простотой использования, а так же большим функционалом для решения любых поставленных задач.
Основная расчетная часть курсового проекта.
Выполним необходимые расчеты и построим графики характеристик для проектирования системы ПЧ-АД.
Тахограмма рабочей машины
Тахограмму рабочей машины строится по данным табл. 1. В ней указаны три установившиеся скорости , , и время t 1, t 2, t 3 работы с этими скоростями, а также время паузы t 0.
Расчетное ПВ%расч определяется как:
| ,1/с
| |
Рис 1. - Тахограмма рабочей машины





