Все элементы АСР по своим динамическим характеристикам, т.е по зависимости выходной величины  можно классифицировать на следующие типовые звенья:
можно классифицировать на следующие типовые звенья:
-безинерционные (усилительные);
-инерционные (апериодическое звено 1-го порядка);
-интегрирующая(астатическое звено 1-го порядка);
-дифференцирующие звенья;
-колебательно затухающее звено;
-аппериодическое звено 2-го порядка;
-звено чистого запаздывания.
Апериодическое звено 1-го порядка – в нем вых. Величина изменяется с изменяющейся до 0 скоростью.


Такая динамика объясняется наличием внутренней отр. обратной связи. Звено описывается ур-ем: T 
T - постоянное времени, к - коэффициент усиления.
Передаточная ф-я 
Решением уравнения динамики является след.выражение: y= 
Дифференцирующее звено – такое у которого выходная величина пропорциональна скорости изменения входной величины


Передаточная функция:
При ступенчатом входном воздействии величина идеального дифференцирующего звена равна ∞, при t=0 и равна 0, при t›0.


В реальных условиях из-за инерционных свойств, т.е. не возможности изменения с ∞ большой скоростью входных и выходных значений динамика дифференцирующего звена описывается следующим уравнением:

Передаточная функция:

Запаздывание выражается в том, что его выходная величина начинает изменяться не сразу после нанесения возмущения, а только через некоторый промежуток времени τ, называемый временем запаздывания. Все реальныеобъекты обладают запаздыванием, так как изменение потоков вещества или тепла распространяется в объектах с конечной скоростью и требуется время для прохождения сигнала от места нанесения возмущения до места, где фиксируется изменение выходной величины. Обозначив это расстояние через l, а скорость прохождения сигнала через v, выразим время запаздывания: τ= l/ v. Примером объекта, обладающего чистым запаздыванием, является ленточный питатель сыпуч.материала.
Звено запаздывания характеризуется ур-ем вида у(t)=X*(t-t)
W(p)=e-pt
Т.е. выходная величина воспроизводит входную с запаздыванием по времени равным t.

Системы любой сложности могут быть представлены как совокупность элементарных динамических звеньев соед. Последовательно, параллельноили с обратной связью.
Основные законы управления
Позиционные регуляторы - регул-ры, у кот.выходная величина при непрерывн. измен. входной величины,может принимать только 2 устойч.состояния. При этом исполнительный механизм обеспечивает мгновенное перемещение из состояния «открыто»в «закрыто» и наоборот. Они просты по конструкции и надёжны в работе. Статич. характеристика регуляторов выражается:

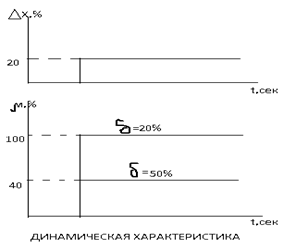
µ-входная величина регулятора,  -заданное значение регулируемого парметра, х-входная величина. Величина 2σ наз. зоной нечувствительности
-заданное значение регулируемого парметра, х-входная величина. Величина 2σ наз. зоной нечувствительности





 - статическая характеристика
- статическая характеристика
σ σ


 0 х
0 х
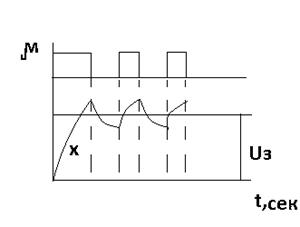 Переходный процесс в системе с позицион.регуляторами(динамич.хар-ка):
Переходный процесс в системе с позицион.регуляторами(динамич.хар-ка):
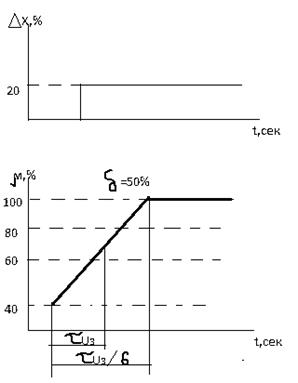
Интегральные – регул-ры,вкот.входная величина влияет на скор.изменения выходной вел-ны. «+»: отсутствие статической ошибки, «-»: низкое быстродействие,можно применять только на объектах с самовыравниваем.
Ур-ние динамики:  , где
, где  -постоянная интегрирования,явл-ся настроечным параметром регулятора и представляет собой время, за кот.выходная величина изменяется на 100% при 100% изменении входн.величины,
-постоянная интегрирования,явл-ся настроечным параметром регулятора и представляет собой время, за кот.выходная величина изменяется на 100% при 100% изменении входн.величины,  – отклонение от заданного значения.
– отклонение от заданного значения.


Пропорциональные-рег-ры, в кот. выходная вел-на изменяется пропорц-льно рассогласованию в пределах зоны регулирования, т.е.  , где σ - предел пропорц-сти - величина входного сигнала, выраженная в %,по действием которой выходной сигнал изменяется от 0 до 100%.
, где σ - предел пропорц-сти - величина входного сигнала, выраженная в %,по действием которой выходной сигнал изменяется от 0 до 100%.
Вне предела пропорциональности(который является настроечным параметром) выходной сигнал = 0 или 100%. «+» регуляторов: выс.быстродействие, можно применять с объектами без самовыравнивания. «-»: статическая ошибка,кот.растёт с увелич.пропорциональности.

Пропорционально-интегральные регуляторы объединяют «+» пропорцион.и интегральных регуляторов. Ур.динамики:

 , где
, где  -постоянная времени интегрирования(время изодрома)-время,за кот.выходная вел-нарегулятора под действием интегральной части изменится на такую же вел-ну,как и под действием пропорц-ной части,если предел пропорц-сти=100%
-постоянная времени интегрирования(время изодрома)-время,за кот.выходная вел-нарегулятора под действием интегральной части изменится на такую же вел-ну,как и под действием пропорц-ной части,если предел пропорц-сти=100%
 Для улучшения качества регулирования в закон регулирования вводят дифференциальную (Д) составляющую, что позволяет повысить воздействие при удалении регулируемой вел-ны от заданного значения и наоборот, т.к. Д-составляющая пропорц-на скор. изменения входной величины,всё это приводит к уменьшению времени регулирования.
Для улучшения качества регулирования в закон регулирования вводят дифференциальную (Д) составляющую, что позволяет повысить воздействие при удалении регулируемой вел-ны от заданного значения и наоборот, т.к. Д-составляющая пропорц-на скор. изменения входной величины,всё это приводит к уменьшению времени регулирования.
Ур.динамики: 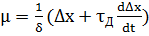 ,
,  -время дифференцирования(предварения). При изменяющейся с постоянной скоростью вх. величине, вых. величина µ скачкообразно изменится под действием Д-составл-щей и далее будет измен.спостоян.скор. под действием пропорциональн.(П)составляющей. Интенсивность Д-составл-щей определяется настройкой времени, на кот.вых.величина ПД-регулятора опережает его П-составляющую при изменении вх.величины с постоян.скор. и пределом пропорц-сти 100%
-время дифференцирования(предварения). При изменяющейся с постоянной скоростью вх. величине, вых. величина µ скачкообразно изменится под действием Д-составл-щей и далее будет измен.спостоян.скор. под действием пропорциональн.(П)составляющей. Интенсивность Д-составл-щей определяется настройкой времени, на кот.вых.величина ПД-регулятора опережает его П-составляющую при изменении вх.величины с постоян.скор. и пределом пропорц-сти 100%
Наиб. эффективным явл. пропорционально-интегрально-дифференциальн. з-н регулирования, в кот. вводится U-составляющая,пропорциональная скорости изменения вх.величины.Ур.динамики:µ= 
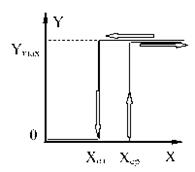
Дискретные преобразователи
Дискретные преобразователи имеют релейную статическую характеристику.При достижении измеряемой величиной значения Хср выходная величина скачкообразно изменяется от 0 до максимального значения Ymax. При дальнейшем увеличении входной величины (перемещения) выходная величина не изменяется. При уменьшении входной величины выходная уменьшается до 0 при другом значении Хот, которое всегда меньше Хср. Дискретные преобразователи характеризуются коэффициентом возврата К=Хот /Хср<1.Они могут быть контактными и бесконтактными.
54. Устойчивость. Критерий Рауса — один из методов анализа линейной стационарной динамической системы на устойчивость. Наряду с критерием Гурвица (который часто называют критерием Рауса — Гурвица) является представителем семейства алгебраических критериев устойчивости (в отличие от частотных критериев — таких, как критерий устойчивости Найквиста — Михайлова.
Несмотря на то, что критерий Рауса исторически предложен ранее критерия Гурвица, его можно использовать как более удобную схему расчёта определителей Гурвица, особенно при больши́х степенях характеристического полинома.
К достоинствам метода относятся простая реализация на ЭВМ, а также простота анализа для систем небольшого (до 3) порядка. К недостаткам можно отнести отсутствие наглядности метода: при его применении сложно получить информацию о степени устойчивости, о её запасах.
Метод работает с коэффициентами характеристического уравнения системы. Пусть  — передаточная функция системы, а
— передаточная функция системы, а  — характеристическое уравнение системы. Представим характеристический полином
— характеристическое уравнение системы. Представим характеристический полином  в виде
в виде

Критерий Рауса представляет собой алгоритм, по которому составляется специальная таблица, в которой записываются коэффициенты характеристического полинома таким образом, что:
1. в первой строке записываются коэффициенты уравнения с чётными индексами в порядке их возрастания
2. во второй строке — с нечётными
3. остальные элементы таблицы определяется по формуле:  , где
, где  — номер строки,
— номер строки,  — номер столбца
— номер столбца
4. число строк таблицы Рауса на единицу больше порядка характеристического уравнения
Формулировка критерия Рауса:
Для устойчивости линейной стационарной системы необходимо и достаточно, чтобы коэффициенты первого столбца таблицы Рауса  были положительными. Если это не выполняется, то система неустойчива.
были положительными. Если это не выполняется, то система неустойчива.






