 Трехфазная симметричная модель синхронной машины. Рассмотрим двухполюсную синхронную машину, состоящую из неподвижной части - статора, на которой расположены три фазные обмотки, и вращающейся части - ротора, с расположенной на ней обмоткой возбуждения. Ротор такой модели машины имеет две оси симметрии. Ось, совпадающую с осью полюсов, принято называть продольной осью ротора, а ось к ней перпендикулярную - поперечной его осью. Примем, что продольная ось опережает по направлению вращения поперечную.
Трехфазная симметричная модель синхронной машины. Рассмотрим двухполюсную синхронную машину, состоящую из неподвижной части - статора, на которой расположены три фазные обмотки, и вращающейся части - ротора, с расположенной на ней обмоткой возбуждения. Ротор такой модели машины имеет две оси симметрии. Ось, совпадающую с осью полюсов, принято называть продольной осью ротора, а ось к ней перпендикулярную - поперечной его осью. Примем, что продольная ось опережает по направлению вращения поперечную.
Обмотки статора расположены симметрично как относительно друг друга, так и относительно осей вращения. Тогда магнитные оси трех фаз статора сдвинуты друг относительно друга на 120 электрических градусов. Если пренебречь потерями в стали и не учитывать насыщения во всех частях машины, то мгновенное значение напряжения на выводах любой из ее обмоток можно записать в виде
 где r - активное сопротивление обмотки;
где r - активное сопротивление обмотки;
i - ток;  - результирующее потокосцепление обмотки;
- результирующее потокосцепление обмотки;
 - ЭДС индуктируемая в обмотке.
- ЭДС индуктируемая в обмотке.
Таким образом, для каждой обмотки приложенное к ней внешнее напряжение, за вычетом активного падения в обмотке, уравновешивается обратной ЭДС. Поскольку рассматриваемые четыре электрические цепи машины (три статорные обмотки и обмотка возбуждения) являются индуктивно связанными, то результирующее потокосцепление любой обмотки зависит от собственной индуктивности обмотки, взаимных индуктивностей между нею и другими обмотками и токов, протекающих в обмотках: 
 В общем случае ротор машины, кроме обмотки возбуждения, имеет еще и демпферную обмотку. Обычно демпферная обмотка представляет собой короткозамкнутую клетку, состоящую из металлических стержней, уложенных в специальные пазы в полюсных наконечниках и соединенных между собой по торцам полюсов. В неявнополюсной машине с массивным ротором специальной демпферной обмотки может и не быть. Роль такой обмотки выполняет тогда массив ротора.
В общем случае ротор машины, кроме обмотки возбуждения, имеет еще и демпферную обмотку. Обычно демпферная обмотка представляет собой короткозамкнутую клетку, состоящую из металлических стержней, уложенных в специальные пазы в полюсных наконечниках и соединенных между собой по торцам полюсов. В неявнополюсной машине с массивным ротором специальной демпферной обмотки может и не быть. Роль такой обмотки выполняет тогда массив ротора.
В магнитном поле по продольной оси машины короткозамкнутые стержни образуют несколько контуров с токами. Эти контуры, работающие параллельно, можно заменить одним эквивалентным продольным демпферным контуром с током iD и параметрами: активным r и индуктивным xD сопротивлениями демпферной обмотки по продольной оси.
Наличие демпферной обмотки усложняет анализ переходных процессов в синхронной машине, поскольку систему дифференциальных уравнений машины необходимо дополнить уравнениями для демпферных контуров по продольной и поперечной осям.
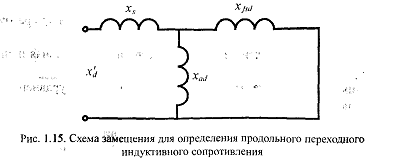 По этому уравнению построена схема замещения для определения продольного переходного индуктивного сопротивления.
По этому уравнению построена схема замещения для определения продольного переходного индуктивного сопротивления.
Переходное индуктивное сопротивление по продольной оси можно измерить в режимах машины, аналогичных для определения синхронного индуктивного сопротивления по этой же оси. Отличие состоит лишь в том, что токи в обмотку статора подаются мгновенно, и в этот же момент производится измерение величины напряжения на выводах статора машины. Скачкообразное изменение тока в обмотке статора обусловливает мгновенное возникновение магнитного поля, стремящегося создать поток через полюса машины. Такой поток был бы сцеплен с обмоткой возбуждения. Но, согласно теореме о постоянстве потокосцепления, в момент подачи тока в статор потокосцепление обмотки возбуждения должно остаться равным нулю. Поэтому в начальный момент может возникнуть только поток рассеяния, не сцепленный с обмоткой возбуждения, а проходящий через обладающие большим магнитным сопротивлением пути рассеяния, преимущественно в воздухе. Возникновению потока через полюса противодействует возникающий в обмотке возбуждения ток ( ), стремящийся поддержать потокосцепление обмотки неизменным, т. е. равным нулю. В этих условиях даже значительное изменение тока (
), стремящийся поддержать потокосцепление обмотки неизменным, т. е. равным нулю. В этих условиях даже значительное изменение тока ( ) приводит к малому изменению потокосцепления (
) приводит к малому изменению потокосцепления ( ) по продольной оси, определяемого только величиной изменения тока в статоре. Поэтому очевидно, что отношение
) по продольной оси, определяемого только величиной изменения тока в статоре. Поэтому очевидно, что отношение  и в рассматриваемых условиях определяет индуктивное сопротивление, называемое переходным:
и в рассматриваемых условиях определяет индуктивное сопротивление, называемое переходным: 
 При отсутствии демпферной обмотки на роторе магнитные потоки в поперечной оси машины связаны только с обмоткой статора и зависят только от поперечной составляющей тока статора.
При отсутствии демпферной обмотки на роторе магнитные потоки в поперечной оси машины связаны только с обмоткой статора и зависят только от поперечной составляющей тока статора.
Если не учитывать магнитные потоки рассеяния, то в продольной оси нагруженной машины существуют два магнитных потока, пронизывающих обмотку статора и ротора: полезный поток  создаваемый током возбуждения, величина которого пропорциональна ЭДС синхронной машины; продольный магнитный поток реакции статора
создаваемый током возбуждения, величина которого пропорциональна ЭДС синхронной машины; продольный магнитный поток реакции статора  вызываемый продольной составляющей тока статора
вызываемый продольной составляющей тока статора  . Как известно, кроме магнитных потоков и существуют еще магнитные потоки рассеяния статора и ротора, сцепленные только со своими обмотками. Поскольку они не оказывают влияния на качественный анализ процессов в синхронной машине, то в дальнейшем мы их рассматривать не будем. Таким образом, результирующий магнитный поток
. Как известно, кроме магнитных потоков и существуют еще магнитные потоки рассеяния статора и ротора, сцепленные только со своими обмотками. Поскольку они не оказывают влияния на качественный анализ процессов в синхронной машине, то в дальнейшем мы их рассматривать не будем. Таким образом, результирующий магнитный поток  сцепленный с обмоткой возбуждения, равен
сцепленный с обмоткой возбуждения, равен 
Такое упрощенное представление синхронной машины в расчетах динамической устойчивости тем более правомерно при оснащении синхронных машин автоматическими регуляторами возбуждения, которые в переходных режимах увеличивают напряжение возбуждения. Тем самым предотвращается снижение тока в обмотке ротора, что способствует стабилизации  на более длительном интервале времени.
на более длительном интервале времени.
5 ФИЗИЧЕСКИЙ СМЫСЛ УГЛА δ
С электрической точки зрения угол δ- это угловой сдвиг во времени синусоид напряжения на шинах бесконечной мощности и ЭДС генератора. Эта же величина имеет вполне определенный механический смысл, что позволяет связать в единых уравнениях как электрические, так и механические величины, характеризующие электромеханические переходные процессы. Известно, что ток возбуждения генератора создает магнитный поток, основная часть которого пронизывает воздушный зазор, пересекает обмотку статора машины и при вращении ротора наводит в ней ЭДС Е q, (рис. 2.4). Векторы Ф d и Е q можно считать жестко связанными с ротором и вращающимися со скоростью ω. При этом вектор Е q отстает от Ф d на 90°. На угол δ вектор Е q опережает вектор напряжения шин системы U.
Проведем в роторе условную пространственную ось, параллельную вектору U, и будем считать, что она вращается с постоянной синхронной скоростью ω 0, так же как и вектор U. Угол, который составляет эта ось с поперечной осью полюсов ротора или вектора Е q в пространстве, равен углу δ. Предположим, что генератор снижает свою активную мощность до нуля (Р = 0, Ia = 0). В таком режиме вектор ЭДС будет совпадать по фазе с вектором U на шинах системы (рис. 2.5).
Поскольку ось полюсов вращается с такой же скоростью, как и вектор ЭДС, то при повороте вектора Е q на некоторый угол она повернется на такой же угол. Таким образом, при работе генератора на холостом ходу поперечная ось полюсов совпадет с проведенной нами выше синхронно вращающейся осью. Следовательно, с механической точки зрения угол δ представляет собой угол в пространстве между поперечной осью полюсов

 ротора при данной активной мощности и синхронно вращающейся в пространстве осью, с которой поперечная ось полюсов совпадала при нулевой активной мощности генератора. Поскольку синхронно вращающаяся в пространстве ось совпадает с вектором U, то с механической точки зрения угол δ характеризует положение ротора относительно оси, совпадающей с вектором U системы и вращающейся в пространстве со скоростью ω 0. С математической точки зрения угол δ в произвольный момент Т
ротора при данной активной мощности и синхронно вращающейся в пространстве осью, с которой поперечная ось полюсов совпадала при нулевой активной мощности генератора. Поскольку синхронно вращающаяся в пространстве ось совпадает с вектором U, то с механической точки зрения угол δ характеризует положение ротора относительно оси, совпадающей с вектором U системы и вращающейся в пространстве со скоростью ω 0. С математической точки зрения угол δ в произвольный момент Т
где δ0 - начальное значение угла.
Рис. 2.4. Схема взаимного расположения
векторов напряжения, и ЭДС в простейшей системе
 Eгол δ отражает связь между механическим состоянием агрегата, состоящего из первичного двигателя и генератора и его электрическим состоянием. Следовательно, угол δ может рассматриваться как один из наиболее важных и информативных параметров режима системы.
Eгол δ отражает связь между механическим состоянием агрегата, состоящего из первичного двигателя и генератора и его электрическим состоянием. Следовательно, угол δ может рассматриваться как один из наиболее важных и информативных параметров режима системы.
Рис. 2.5. Векторная диаграмма режима системы при P=0 генератора






