Функции автоматические регуляторы возбуждения синхронных машин:
- обеспечение поддержания требуемого уровня напряжения на зажимах машин или реактивной мощности в установившемся режиме системы;
- повышение статической и динамической устойчивости при возмущениях в электроэнергетической системе;
- увеличение требуемого качества переходных процессов в электроэнергетической системе.
Устройства АРВ подразделяются на 2 типа: пропорционального и сильного действия.
Структурная схема пропорционального действия:
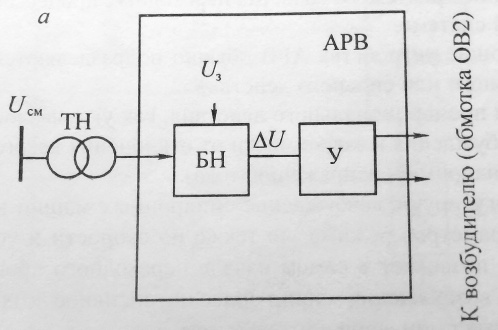
Он изменяет ток возбуждения в зависимости от отклонения какого-либо параметра режима.
От тр-ра напряжения(ТН) подается напряжение, пропорциональное напряжению статора СМ(UСМ), на вход блока напряжения(БН).Блок БН выявляет отклонение напряжения от заданной уставки ΔU=UЗ-UСМ.Полученная разность ΔU усиливается в усилителе(У) и подается на обмотку возбуждения ОВ2 возбудителя синхронной машины. Такой регулятор стремиться поддерживать напряжение на зажимах синхронной машины в соответствии с заданным значением UЗ . В синхронных машинах с регуляторами АРВ ПД напряжение поддерживается с определенной точностью, статизмом, зависящие от коэф.усиления(kU) усилителя У. Регулирование UСМ по отклонению напряжения приводит к поддержанию неизменным напряжения внутри обмотки синхронной машины за некоторым его сопротивлением.
Структурная схема сильного действия:
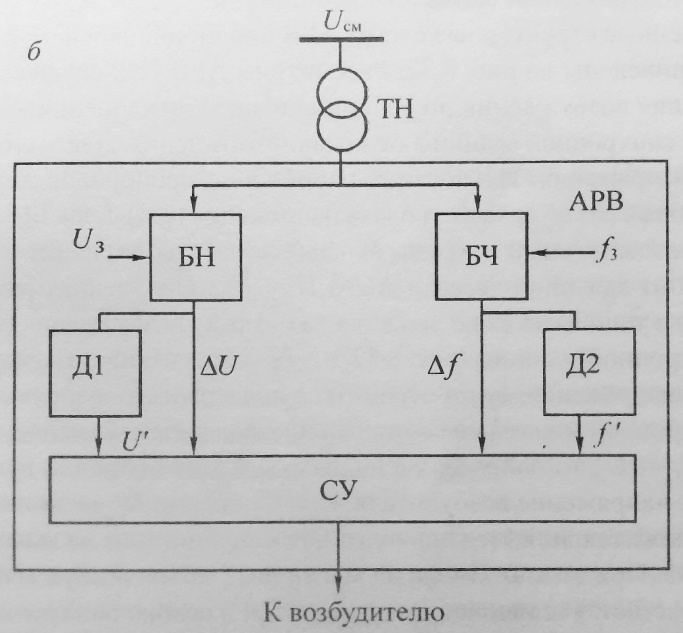
Осуществляет регулирование по ΔU, U I, Δf, f I. Напряжение статора синхронной машины UСМ подводится от трансформатора напряжения ТН к блоку напряжения БН и к блоку частоты БЧ. Блок БН выявляет отклонения частоты, а дифференцирующий элемент(Д1) определяет скорость изменения напряжения U I. Блок БЧ выявляет отклонения частоты от нормального значения и формирует сигнал Δf. Одновременно дифференцирующий элемент(Д2) определдяет скорость изменения частоты f I. Значения параметров ΔU, U I, Δf, f I подаются на суммирующий усилитель(СУ). Сигнал с выхода СУ АРВ СД поступает в схему управления тиристорной или бесщеточной систем возбуждения. АРВ СД реагирует ещё и на скорость изменения параметров, это позволяет с опережением выявлять характер возникшего переходного процесса и оказывать воздействие на систему возбуждения синхронной машины в самом начале изменения режима. Такая система может поддерживать практически постоянное напряжение на шинах синхронных машин во всех режимах её работы при малых возмущениях. При возникновении больших возмущений в энергосистеме возбуждения, оснащённые АРВ СД, не могут поддерживать постоянного напряжения на шинах синхронных машин. Поэтому в начале переходного процесса синхронная машина с АРВ СД может быть представлена аналогично машине с АРВ ПД.
61 Аварийное управление мощностью турбин электростанций для повышения устойчивости.
Проблема обеспечения устойчивости энергосистем существует из-за возникающего в аварийных режимах небаланса мощности на валу синхронных машин, приводящему к недопустимому их ускорению или торможению, следствием которых является потеря синхронизма. Если бы механическая мощность агрегатов могла достаточно быстро и точно изменяться в соответствии с изменениями электрической мощности, то небалансы мощности были бы устранены и, следовательно, нарушения динамической устойчивости в энергосистемах были бы исключены. Однако существующие системы регулирования паровых турбин пока не могут решить такую задачу. Более того, системы регулирования, обычно применяемые в нормальном режиме, из-за наличия инерции, органов с зонами нечувствительности практически не реагируют в начале переходного процесса и мощности турбин почти не изменяются. Для обеспечения динамической устойчивости требуется быстрое изменение мощности турбины при возникновении возмущения в энергосистеме. Поэтому для быстрого управления мощностью турбины в аварийных режимах она оснащается специальным электрогидравлическим преобразователем (ЭГП), который позволяет вводить в систему регулирования электрические сигналы (импульсы) и тем самым осуществить быстродействующее управление регулирующих клапанов турбины. При этом происходит относительно быстрое уменьшение механической мощности на валу агрегата, необходимое для обеспечения устойчивости в случае сброса электрической нагрузки генератором. Различные аварийные ситуации требуют различной глубины разгрузки, но по возможности наибольшей скорости ее осуществления. Скорость разгрузки турбины не может быть сколь угодно большой и ограничивается в основном быстродействием регулирующих клапанов и наличием парового объема между ними и турбиной. Поэтому мощность турбины снижается постепенно и ее изменение зависит от амплитуды Um, длительности Тu и величины остаточного Uoc управляющего сигнала от ЭГП. Изменяя его, можно получить различные изменения механической мощности во времени, которые называют импульсными характеристиками турбин (рис. 8.37). После снятия управляющего сигнала регулирующие клапаны открываются и мощности агрегатов восстанавливаются до заданного значения, определяемого условиями устойчивости (рис. 8.38).
Рассмотрим влияние аварийной разгрузки турбины (APT) на устойчивость системы при возникновении КЗ. Для этого на диаграмме характеристик мощности (рис. 8.39) нанесем изменение механической мощности турбины Рт в функции угла ᵟ.

Рис. 8.37. Импульсная характеристика (I) турбины и график (2) управляющего
сигнала от ЭГП

Рис. 8.38. Изменение мощности турбины по условиям обеспечения устойчивости: 1 - динамической; 2 - статической и динамической; 3 - статической

Рис. 8.39. Влияние аварийной разгрузки турбин на динамическую устойчивость
Из приведенных зависимостей видно, что существенное уменьшение РT наступает после времени отключения КЗ, длительность которых для современных систем электроснабжения составляет 0,1-0,2 с. Поэтому APT практически не уменьшает площадку ускорения, и это было одним из препятствий для его применения. Однако в конце переходного процесса Рт начинает уменьшаться, что приводит к увеличению площадки торможения и критического угла с ᵟкр до ᵟ^mкр, определяющего предел синхронной динамической устойчивости генератора.
Таким образом, применение APT позволяет повысить динамическую устойчивость и быстро восстановить режим электростанции в послеава-рийном режиме. Это ее главное достоинство. К недостаткам следует отнести задержку в ограничении механической мощности, что в ряде аварийных режимов снижает ее эффективность, а также возможность нарушения устойчивости во втором и последующих циклах качаний из-за высокой скорости восстановления мощности турбины.






