

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Топ:
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
СОДЕРЖАНИЕ
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
УТВЕРЖДАЮ
Зав. кафедрой
« » 2017г.
ЗАДАНИЕ
НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ
По курсу Теория автоматическогоуправления
Студенту
Темапроекта Анализ и синтез системы автоматическогоуправления
 Вариант 15. Исходные данные
Вариант 15. Исходные данные
Рисунок 1. Структурная схема системы автоматического управления Передаточные функции:
k1 = 2,
k2 = 1,
W1 (p)= ,
p 1
W2 (p)=
2
0.6p +2,
W3 (p)=
1
0.02 p +1,
W4 (p)=
3
2.5 p+1
, W5
(p)=
1
3p +2
Возмущающее воздействие .
Показатели качества регулирования: ,
,
.
ЗАДАНИЕ
1. Привести исходную структурную схему к типовой одноконтурной системе автоматического управления.
2. По полученной передаточной функции объекта управлениязаписать:
2.1. линейное дифференциальное уравнение объекта управления и привести его к стандартной формезаписи;
2.2. получить описание объекта управления через нули полюса и коэффициенты усилениясистемы;
2.3. получить описание объекта управления в форме матрицы пространства состояния.
3. Найти передаточную функцию системы по задающему и возмущающему воздействию. Записать уравнение динамикиАСУ.
4. Исследоватьобъектуправлениянаустойчивостьалгебраическимиичастотными методами, определить запасустойчивости.
5. Выбрать закон управления и произвести расчет настроечных параметров регулятора по заданным параметрам качествауправления.
|
|
Рекомендуемая литература:
1. Теория автоматического управления. Методические указания и варианты заданий для практических занятий. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 42 с.- Электрон. опт. диск (CD- ROM).
2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 71 с.- Электрон. опт. диск (CD- ROM).
3. Гоппе Г.Г., Федорова З.А. Теория автоматического управления. Методическое пособие и варианты заданий для курсового проектирования студентам специальностей: 1804 – Электропривод и автоматика промышленных и технологических комплексов; 1807 – Электрический транспорт– Иркутск, Изд-во ИрГТУ, 2003 г.- 26c.
Дата выдачизадания« » 2017 г.
Дата представления проектаруководителю« » 2017 г. Руководителькурсовогопроектирования ГерасимовД.О.
ВВЕДЕНИЕ
Теория автоматического управления — научная дисциплина, изучающая процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Является составной частью технической кибернетики и предназначена для разработки общих принципов автоматического управления, а также методов анализа (исследования функционирования) и синтеза (выбора параметров) систем автоматического управления (САУ) техническими объектами.
В ИЭС ААС важная роль отводится активно-адаптивной электрической сети, как технологической инфраструктуре электроэнергетики, собственно наделяющей интеллектуальную энергосистему принципиально новыми свойствами.
Активно-адаптивная сеть — это совокупность подключённых к генерирующим источникам и потребителям «интеллектуальных» устройств — линий электропередачи, преобразователей электроэнергии, коммутационных аппаратов, устройств защиты и автоматики, современных информационно-технологических и управляющих систем, источников генерации, в том числе использующих возобновляемую энергию, — снабженная распределённой системой мониторинга и автоматического управления распределёнными техническими средствами.
Эта система выдаёт информацию о текущем состоянии оборудования, организует адаптивную реакцию системы в режиме реального времени на различные возмущения, обеспечивая тем самым надёжное энергоснабжение потребителей, энергоэффективность и устойчивость функционирования электроэнергетических систем в целом.
|
|
Уравнение динамики АСУ
ЗАКЛЮЧЕНИЕ
В данной курсовой работе были определены передаточные функции по задающему воздействию и по возмущающему. Проведена проверка устойчивости САУ с помощью критерия Гурвица и критерия Михайлова, в результате чего был сделан вывод, что она устойчива. Так же были определены переходные функции по задающему воздействию и по возмущающему воздействию. Построены их характеристики (было выполнено построение имитационной модели с использованием приложения SIMULINK пакета MATLAB). Выполнен переходный процесс при одновременном действии задающего и возмущающего воздействия. Для САУ статического режима сделан синтез. Он был проверен получением переходной функции способом структурного моделирования.
СОДЕРЖАНИЕ
Министерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
ИРКУТСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
УТВЕРЖДАЮ
Зав. кафедрой
« » 2017г.
ЗАДАНИЕ
НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ
По курсу Теория автоматическогоуправления
Студенту
Темапроекта Анализ и синтез системы автоматическогоуправления
Вариант 15. Исходные данные
Рисунок 1. Структурная схема системы автоматического управления Передаточные функции:
k1 = 2,
k2 = 1,
W1 (p)= ,
p 1
W2 (p)=
2
0.6p +2,
W3 (p)=
1
0.02 p +1,
W4 (p)=
3
2.5 p+1
, W5
(p)=
1
3p +2
Возмущающее воздействие .
Показатели качества регулирования: ,
,
.
ЗАДАНИЕ
|
|
1. Привести исходную структурную схему к типовой одноконтурной системе автоматического управления.
2. По полученной передаточной функции объекта управлениязаписать:
2.1. линейное дифференциальное уравнение объекта управления и привести его к стандартной формезаписи;
2.2. получить описание объекта управления через нули полюса и коэффициенты усилениясистемы;
2.3. получить описание объекта управления в форме матрицы пространства состояния.
3. Найти передаточную функцию системы по задающему и возмущающему воздействию. Записать уравнение динамикиАСУ.
4. Исследоватьобъектуправлениянаустойчивостьалгебраическимиичастотными методами, определить запасустойчивости.
5. Выбрать закон управления и произвести расчет настроечных параметров регулятора по заданным параметрам качествауправления.
Рекомендуемая литература:
1. Теория автоматического управления. Методические указания и варианты заданий для практических занятий. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 42 с.- Электрон. опт. диск (CD- ROM).
2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 71 с.- Электрон. опт. диск (CD- ROM).
3. Гоппе Г.Г., Федорова З.А. Теория автоматического управления. Методическое пособие и варианты заданий для курсового проектирования студентам специальностей: 1804 – Электропривод и автоматика промышленных и технологических комплексов; 1807 – Электрический транспорт– Иркутск, Изд-во ИрГТУ, 2003 г.- 26c.
Дата выдачизадания« » 2017 г.
Дата представления проектаруководителю« » 2017 г. Руководителькурсовогопроектирования ГерасимовД.О.
ВВЕДЕНИЕ
Теория автоматического управления — научная дисциплина, изучающая процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Является составной частью технической кибернетики и предназначена для разработки общих принципов автоматического управления, а также методов анализа (исследования функционирования) и синтеза (выбора параметров) систем автоматического управления (САУ) техническими объектами.
|
|
В ИЭС ААС важная роль отводится активно-адаптивной электрической сети, как технологической инфраструктуре электроэнергетики, собственно наделяющей интеллектуальную энергосистему принципиально новыми свойствами.
Активно-адаптивная сеть — это совокупность подключённых к генерирующим источникам и потребителям «интеллектуальных» устройств — линий электропередачи, преобразователей электроэнергии, коммутационных аппаратов, устройств защиты и автоматики, современных информационно-технологических и управляющих систем, источников генерации, в том числе использующих возобновляемую энергию, — снабженная распределённой системой мониторинга и автоматического управления распределёнными техническими средствами.
Эта система выдаёт информацию о текущем состоянии оборудования, организует адаптивную реакцию системы в режиме реального времени на различные возмущения, обеспечивая тем самым надёжное энергоснабжение потребителей, энергоэффективность и устойчивость функционирования электроэнергетических систем в целом.
Приведение структурной схемы к одноконтурной САУ
Типовая одноконтурная система автоматического управления.


| x(t) |
| f(t) |
| + |
| + |
| + |
| y(t) |
| - |
| W o (p) |
| W p (p) |

| + |
| 2 |
 Структурная схема регулятора.
Структурная схема регулятора.
|
| 2 0.6p +1 |
W6 (p)=k1+W1(p)=2 +  =
= 
Wp(p) = W6(p)· W2(p) = ·  =
=  ·
·
| 2p +1 0.6p2 +p |
Структурная схема объекта

|

 +
+

|

|


 =
=
|
Типовая одноконтурная схема
|
x(t)

Линейное дифференциальное уравнение объекта управления по передаточной функции объекта управления.
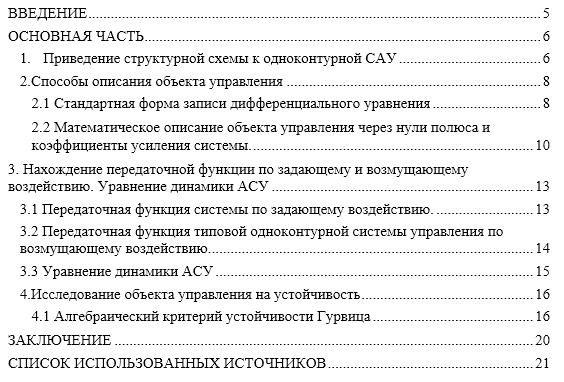
Передаточная функция объекта управления.

Линейное дифференциальное уравнение объекта управления.

Приводим дифференциальное уравнение к стандартной форме записи.



Передаточная функция объекта управления по стандартной форме записи дифференциальногоуравнения.
W o (p)=
0.47  +0.31p+1
+0.31p+1
0.15p3 +7.6p2 + 5.02p +1
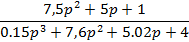
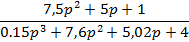
Корректность преобразований верифицируем сравнением результатов реакции передаточных функций объекта управления на единичное ступенчатое воздействие.
Проверка проводится в системе Octave пакета Control.
|
|
>> wo1=tf([7.55 1],[0.15 7.65.024])
Transfer function 'wo1' from input 'u1' to output ...
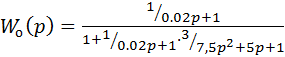
7.5 s^2 + 5 s + 1
y1: ------------------------------------
0.15 s^3 + 7.6 s^2 + 5.02 s + 4
>> wo2=tf([0.47 0.31 1],[0.15 7.64 5.02 1])
Transfer function 'wo2' from input 'u1' to output ...
0.47s^2 + 0.31s + 1
y1: -------------------------------------
0.15 s^3 + 7.64s^2 + 5.02s + 1
step(wo1)
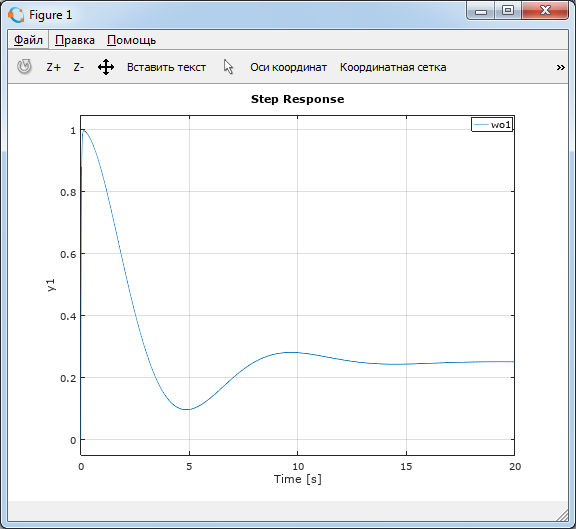
Рисунок 2. Графикпередаточной функции объекта управления
step(wo2)

Рисунок 3. График передаточной функции объекта управления
Анализ полученных графиков показал полное совпадение переходных характеристик, следовательно, преобразования выполнены корректно.
Математическоеописаниеобъектауправлениячерезнулиполюсаикоэффициенты усилениясистемы.
Передаточная функция объекта управления, полученная по стандартной форме линейного дифференциального уравнения объекта управления.
W o (p)=
0.47 +0.31p+1
0.15p3 +7.6p2 + 5.02p +1
В числители и знаменатели передаточной функции записаны полиномы. Корни знаменателя называются полюсами, корни числителя нулями. В общем виде математическое описание объекта управления через нули полюса икоэффициенты усиления системы имеетвид.
W (p)=k
(p -Z m)(p -Z m-1 )...(p -Z1 )
o (p-N
)(p -N )...(p -N )
n n-1 1
Коэффициент усиления системы
k =a m
b n
=0.47 =3
0.15
Корни числителя и знаменателя найдём, используя систему Octave пакета Control.
pkgloadcontrol
>>wo1=tf([0.470.311],[0.15 7.6 5.02 1])
Transfer function 'wo1' from input 'u1' to output
0.47 s^2 + 0.31 s + 1
y1: ----------------------------------
0.15 s^3 + 7.6 s^2 + 5.02 s + 1
>>pole(wo1)
ans =
-50.00000 + 0.00000i
-0.33333 + 0.14907i
-0.33333 - 0.14907i
>>zero(wo1)
ans =
-0.3298
-0.3298

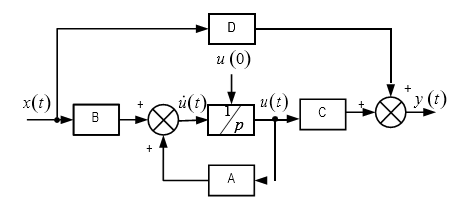
Математическое описание объекта управления в виде модели пространства состояния.
Уравнения состояния – система дифференциальных уравнений, записанных в нормальной форме Коши.

Где:
u(t)-вектор состояния;
x(t),y (t)-векторы входа и выхода системы;
A -матрица коэффициентов;
B -матрица управления;
C - матрица выхода;
D -матрица, характеризующая связь входного сигнала с выходным.
Сущность данной формы представления заключается в том, что дифференциальное уравнение n -го порядка записывается в виде системы дифференциальных уравнений первого порядка. Процедура преобразования дифференциального уравнения n -го порядка в векторно – матричное уравнение, состоящее из n дифференциальных уравнений первого порядка, осуществляется путём введения дополнительных переменных. Эти дополнительные называются переменными состояния системы, объекта.
Структурная схема непрерывной линейной системы, представленной в виде переменных состояний.
Матрицы пространства состояния найдем, используя систему Octave пакета Control.
>> wo1=tf[0.47 0.31 1],[0.15 7.6 5.02 1])
Transfer function 'wo1' from input 'u1' to output ...
0.47 s^2 + 0.31 s + 1
y1: -------------------------------
0.15 s^3 + 7.6 s^2 + 5.02 s + 1
Continuous-time model.
>>ss(wo1)
ans.a =
x1 x2 x3
x1 1.111e-016 -8.979e-016 -0.6667
x2 -1 -1.021e-016 3.347
x3 0 -10 -50.67
ans.b =
u1
x1 0.1
x2 -0.031
x3 0.47
ans.c =
x1 x2 x3
y1 0 0 6.667
ans.d =
u1
y1 0
Continuous-time model.
А = 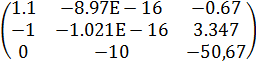
B =  C =
C =  D = 0
D = 0
|
|
|
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!