ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по дисциплине «Теория автоматического управления»
на тему: «Исследование линейных и нелинейных систем управления».
Реферат
32 с., 26 рис., 3 табл., 3 источника информации
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ, АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР, СИНТЕЗ, УПРАВЛЯЕМОСТЬ, НАБЛЮДАЕМОСТЬ, НЕЛИНЕЙНЫЙ, АВТОКОЛЕБАНИЯ
Основной задачей курсового проекта является практическое использование знаний, полученных в процессе изучения курса, развитие навыков в расчете и выборе оптимальных параметров настройки регуляторов одноконтурных систем регулирования при проектировании.
В данной работе синтезированы П-, ПИ-, ПИД-регуляторы для линейной САР, произведены анализ качества регулирования, оценка управляемости и наблюдаемости САР, для нелинейной САР определена возможность возникновения автоколебаний.
Содержание
Введение
1 Расчет параметров настройки типовых регуляторов линейной САР
1.1 Анализ объекта регулирования
1.2 Расчет коэффициентов передачи п-регулятора
1.3 Расчет параметров настройки пи-регулятора
1.4 Расчет параметров настройки пид-регулятора
2 Анализ переходных характеристик линейной сар
2.1 Оценка качества САР по каналу управляющего воздействия
2.2 Оценка качества САР по каналу возмущающего воздействия
2.3 Оценка запаса устойчивости САР
3 Оценка управляемости и наблюдаемости линейной САР
3.1 Анализ САР с п-регулятором
3.1.1 Разработка математической модели типа «вход-состояние-выход»
3.1.2 Структурная схема САР с п-регулятором
3.1.3 Оценка управляемости САР с п-регулятором
3.1.4 Оценка наблюдаемости САР с п-регулятором
3.2 Анализ САР с пи-регулятором
3.2.1 Разработка математической модели типа «вход-состояние-выход»
3.2.2 Структурная схема САР с пи-регулятором
3.2.3 Оценка управляемости САР с пи-регулятором
3.2.4 Оценка наблюдаемости САР с пи-регулятором
3.3 Анализ САР с пид-регулятором
3.3.1 Разработка математической модели типа «вход-состояние-выход»
3.3.2 Структурная схема САР с пид-регулятором
3.3.3 Оценка управляемости САР с пид-регулятором
3.3.4 Оценка наблюдаемости САР с пид-регулятором
4 Анализ нелинейной САР
4.1 Описание нелинейной САР
4.2 Оценка возможности возникновения автоколебаний
4.3 Моделирование нелинейной САР в simulink
Заключение
Список использованных источников
Введение
Всякая система регулирования может быть представлена рядом элементов, выполняющих определенные функции. В данной курсовой работе будут рассмотрены непрерывная система регулирования, состоящая из объекта регулирования, автоматического регулятора, и нелинейная система, включающая нелинейное звено.
Принципиально отличает объект регулирования от всех остальных элементов системы то, что он обычно бывает, задан и при разработке системы автоматического регулирования не может быть изменен, тогда как остальные элементы выбираются специально для решения заданной задачи управления.
Задача выбора параметров настройки в системе автоматического регулирования или управления состоит в том, чтобы найти такие параметры регулятора, при которых переходный процесс в системе удовлетворяет следующим требованиям:
· затухание переходного процесса должно быть интенсивным;
· перерегулирование должно быть минимальным;
· продолжительность переходного процесса должна быть минимальным.
Большинство уравнений объектов являются нелинейными, однако в этих случаях знание решений, полученных для линейных систем, часто дает возможность подойти к решению для нелинейной системы.
Анализ нелинейной САР
Описание нелинейной САР
Cтруктурная схема нелинейной САР представлена на рисунке 21.

Рисунок 21 – Структурная схема нелинейной САР
Роль АР выполняет ПИ-регулятор с передаточной функцией, полученной в п. 1.4:
 .
.
Нелинейное звено – звено с насыщением (ограничением), статическая характеристика звена изображена на рисунке 22.

Рисунок 22 – Статическая характеристика нелинейного элемента
Параметры звена с насыщением:  .
.
Оценка возможности возникновения автоколебаний
Для оценки возможности и устойчивости автоколебаний в нелинейной САР по методу Гольдфарба необходимо линеаризовать систему. Применим к нелинейному элементу гармоническую линеаризацию. Тогда передаточная функция звена с насыщением будет иметь вид:
 , ,
|
|
где  ,
,
 при
при  , т. е.
, т. е.  .
.
Таким образом, передаточная функция нелинейного элемента принимает вид:
 .
.
Условие возникновения автоколебаний:
 , ,
|
|
или
 , ,
|
|
где  ,
,
 – передаточная функция линейной части разомкнутой САР с ПИ-регулятором (см. п. 1.4).
– передаточная функция линейной части разомкнутой САР с ПИ-регулятором (см. п. 1.4).
Уравнение (19) решаем графически. Для этого необходимо построить на одной комплексной плоскости годограф Найквиста линейной части и годограф Гольдфарба  .
.
Script 21:
>> A=0.001:0.001:5;
>> Wnon=(2./pi).*(asin(2.4./A)+(2.4./A).*sqrt(1-5.76./A.^2));
>> Z=-1./(Wnon);
>> Re=real(Z);
>> Im=imag(Z);
>> w=0.1:0.01:1;
>> W2=(b3*(j*w).^3+b2*(j*w).^2+b1*(j*w)+b0)./ ...
(a4*(j*w).^4+a3*(j*w).^3+a2*(j*w).^2+a1*(j*w));
>> re=real(W2);
>> im=imag(W2);
>> plot(re,im,Re,Im);grid
Построенные в результате выполнения Script 21 годографы приведены на рисунке 23. На рисунке 24 показана увеличенно область, в которой годографы могут пересекаться. Видно, что годографы не пересекаются, значит автоколебания в системе невозможны.

Рисунок 23 – Годографы линеаризованной САР
Рисунок 24 – Годографы линеаризованной САР (увеличенно)
Моделирование нелинейной САР в Simulink
Для подтверждения сделанных выводов построим модель САР в Simulink. Схема модели изображена на рисунке 25, переходная характеристика, полученная с помощью этой модели – на рисунке 26.

Рисунок 25 – Схема s-модели нелинейной САР
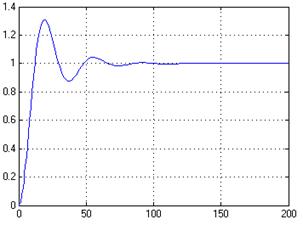
Рисунок 26 – Переходная характеристика нелинейной САР
Очевидно, что автоколебаний в системе нет, значит, расчеты и вывод о том, что в системе невозможны автоколебания, были сделаны верно.
Заключение
В ходе выполнения курсового проекта был произведен анализ объекта регулирования, построены кривая разгона ОР.
В результате проведения необходимых расчетов были определены оптимальные параметры настройки П, ПИ, ПИД-регуляторов, запас устойчивости систем, оценено качество переходных процессов САР с П, ПИ, ПИД-регуляторами. Также был проведен анализ наблюдаемости и управляемости САР: система со всеми тремя регуляторами оказалась полностью наблюдаемой и управляемой.
Для случая, когда регулирующий орган имеет нелинейную характеристику был проведен анализ на возможность возникновения автоколебаний в нелинейной системе регулирования методом Гольдфарба. Установлено, что автоколебания в системе невозможны. Невозможность автоколебаний подтверждена моделированием системы в Simulink.
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по дисциплине «Теория автоматического управления»
на тему: «Исследование линейных и нелинейных систем управления».
Реферат
32 с., 26 рис., 3 табл., 3 источника информации
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ, АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР, СИНТЕЗ, УПРАВЛЯЕМОСТЬ, НАБЛЮДАЕМОСТЬ, НЕЛИНЕЙНЫЙ, АВТОКОЛЕБАНИЯ
Основной задачей курсового проекта является практическое использование знаний, полученных в процессе изучения курса, развитие навыков в расчете и выборе оптимальных параметров настройки регуляторов одноконтурных систем регулирования при проектировании.
В данной работе синтезированы П-, ПИ-, ПИД-регуляторы для линейной САР, произведены анализ качества регулирования, оценка управляемости и наблюдаемости САР, для нелинейной САР определена возможность возникновения автоколебаний.
Содержание
Введение
1 Расчет параметров настройки типовых регуляторов линейной САР
1.1 Анализ объекта регулирования
1.2 Расчет коэффициентов передачи п-регулятора
1.3 Расчет параметров настройки пи-регулятора
1.4 Расчет параметров настройки пид-регулятора
2 Анализ переходных характеристик линейной сар
2.1 Оценка качества САР по каналу управляющего воздействия
2.2 Оценка качества САР по каналу возмущающего воздействия
2.3 Оценка запаса устойчивости САР
3 Оценка управляемости и наблюдаемости линейной САР
3.1 Анализ САР с п-регулятором
3.1.1 Разработка математической модели типа «вход-состояние-выход»
3.1.2 Структурная схема САР с п-регулятором
3.1.3 Оценка управляемости САР с п-регулятором
3.1.4 Оценка наблюдаемости САР с п-регулятором
3.2 Анализ САР с пи-регулятором
3.2.1 Разработка математической модели типа «вход-состояние-выход»
3.2.2 Структурная схема САР с пи-регулятором
3.2.3 Оценка управляемости САР с пи-регулятором
3.2.4 Оценка наблюдаемости САР с пи-регулятором
3.3 Анализ САР с пид-регулятором
3.3.1 Разработка математической модели типа «вход-состояние-выход»
3.3.2 Структурная схема САР с пид-регулятором
3.3.3 Оценка управляемости САР с пид-регулятором
3.3.4 Оценка наблюдаемости САР с пид-регулятором
4 Анализ нелинейной САР
4.1 Описание нелинейной САР
4.2 Оценка возможности возникновения автоколебаний
4.3 Моделирование нелинейной САР в simulink
Заключение
Список использованных источников
Введение
Всякая система регулирования может быть представлена рядом элементов, выполняющих определенные функции. В данной курсовой работе будут рассмотрены непрерывная система регулирования, состоящая из объекта регулирования, автоматического регулятора, и нелинейная система, включающая нелинейное звено.
Принципиально отличает объект регулирования от всех остальных элементов системы то, что он обычно бывает, задан и при разработке системы автоматического регулирования не может быть изменен, тогда как остальные элементы выбираются специально для решения заданной задачи управления.
Задача выбора параметров настройки в системе автоматического регулирования или управления состоит в том, чтобы найти такие параметры регулятора, при которых переходный процесс в системе удовлетворяет следующим требованиям:
· затухание переходного процесса должно быть интенсивным;
· перерегулирование должно быть минимальным;
· продолжительность переходного процесса должна быть минимальным.
Большинство уравнений объектов являются нелинейными, однако в этих случаях знание решений, полученных для линейных систем, часто дает возможность подойти к решению для нелинейной системы.
Расчет параметров настройки типовых регуляторов линейной САР
Анализ объекта регулирования
Кривая разгона показывает реакцию объекта регулирования на единичное ступенчатое воздействие. Она строится по данным, полученным в результате решения дифференциального уравнения системы при скачкообразном входном воздействии и нулевых начальных условиях.
Передаточная функция объекта регулирования
| (
|
Построим кривую разгона, с помощью системы MATLAB.
Script 1:
>> Wop=tf([0.9 7 2.2],[336 146 21 1]);
>> step(Wop);grid
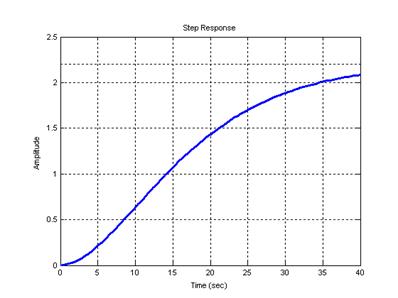
Рисунок 2 – Кривая разгона ОР
Анализируя разгонную характеристику, можно сделать вывод, что ОР обладает свойством самовыравнивания и запаздывания, является многоемкостным.
Расчет коэффициентов передачи П-регулятора
Степень колебательности переходного процесса:

Передаточная функция П-регулятора определяется по формуле
Для того чтоб определить коэффициент передачи  , необходимо построить кривую равной степени затухания.
, необходимо построить кривую равной степени затухания.
Script 2:
>> m=0.313;
>> w=0:0.001:0.26;
>> Wex=(0.9*((j-m).*w).^2+7*(j-m).*w+2.2)./ ...
(336*((j-m).*w).^3+146*((j-m).*w).^2+21*(j-m).*w+1);
>> Win=1./Wex;
>> R=real(Win);
>> I=imag(Win);
>> Ki=w*(m^2+1).*I;
>> Kp=m.*I-R;
>> plot(Kp,Ki);xlabel('Axis Kp');ylabel('Axis Ki');grid

Рисунок 3 – Кривая равной степени затухания
Согласно полученной кривой kp=2.663 при ki=0. Значит коэффициент передачи П-регулятора kP=2.663.
Построим переходную характеристику САР с П-регулятором.
Script 3:
>> Wop=tf([0.9 7 2.2],[336 146 21 1]);
>> Wap1=tf(2.663);
>> W1=series(Wap1,Wop)
Transfer function:
2.397 s^2 + 18.64 s + 5.859
----------------------------
336 s^3 + 146 s^2 + 21 s + 1
>> Fi1=feedback(W1,1)
Transfer function:
2.397 s^2 + 18.64 s + 5.859
-------------------------------------
336 s^3 + 148.4 s^2 + 39.64 s + 6.859
>> step(Fi1);grid
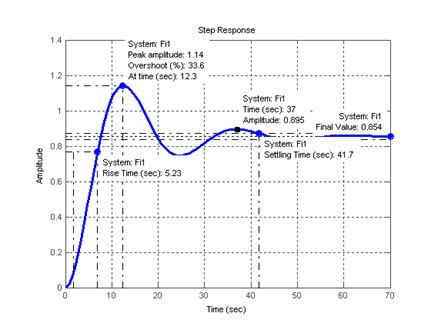
Рисунок 4 – Переходная характеристика САР с П-регулятором
Определяем полученную в результате синтеза степень затухания по формуле
| (
|
Script 4:
>> ((1.14-0.854)-(0.895-0.854))/(1.14-0.854)
ans = 0.8566
Полученная степень затухания примерно совпадает с заданной, значит коэффициент передачи выбран верно.
Расчет параметров настройки ПИ-регулятора
Передаточная функция ПИ-регулятора определяется по формуле
Коэффициенты kp и ki определяем по кривой равной степени затухания (рисунок 3). kp = 1.21 и ki = 0.098. Тогда передаточная функция ПИ-регулятора будет иметь вид
.
Построим переходную характеристику САР с ПИ-регулятором.
Script 5:
>> Wop=tf([0.9 7 2.2],[336 146 21 1]);
>> Wap2=tf([1.21 0.098],[1 0]);
>> W2=series(Wap2,Wop)
Transfer function:
1.089 s^3 + 8.558 s^2 + 3.348 s + 0.2156
----------------------------------------
336 s^4 + 146 s^3 + 21 s^2 + s
>> Fi2=feedback(W2,1)
Transfer function:
1.089 s^3 + 8.558 s^2 + 3.348 s + 0.2156
--------------------------------------------------
336 s^4 + 147.1 s^3 + 29.56 s^2 + 4.348 s + 0.2156
>> step(Fi2);grid
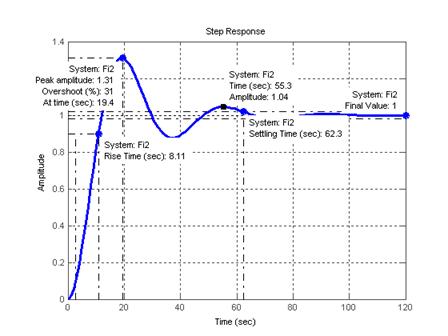
Рисунок 5 – Переходная характеристика САР с ПИ-регулятором
По формуле (3) определяем степень затухания ψ
Script 6:
>> ((1.31-1)-(1.04-1))/(1.31-1)
ans = 0.8710
Полученная степень затухания примерно совпадает с заданной, значит параметры настройки регулятора выбраны верно.
Расчет параметров настройки ПИД-регулятора
Передаточная функция ПИД-регулятора определяется по формуле
 , ,
|
|
где  .
.
Т. к. для ПИД-регулятора необходимо определить три коэффициента, то построим кривую равной степени затухания с учетом времени дифференцирования  .
.
Script 7:
>> w=0.15:0.001:0.26;
>> Wex=(0.9*((j-m).*w).^2+7*(j-m).*w+2.2)./ ...
(336*((j-m).*w).^3+146*((j-m).*w).^2+21*(j-m).*w+1);
>> Win=1./Wex;
>> R=real(Win);
>> I=imag(Win);
>> Ki=w*(m^2+1).*(I+w*2.04);
>> Kp=m.*I-R+2*m.*w*2.04;
>> plot(Kp,Ki);xlabel('Axis Kp');ylabel('Axis Ki');grid

Рисунок 6 – Кривая равной степени затухания
Коэффициенты kp и ki определяем по кривой равной степени затухания (рисунок 6). kp = 2.05 и ki = 0.18. Тогда передаточная функция ПИД-регулятора будет иметь вид
 .
.
Построим переходную характеристику САР с ПИД-регулятором.
Script 8:
>> Wop=tf([0.9 7 2.2],[336 146 21 1]);
>> Wap3=tf([2.04 2.05 0.18],[1 0]);
>> W3=series(Wap3,Wop)
Transfer function:
1.836 s^4 + 16.13 s^3 + 19 s^2 + 5.77 s + 0.396
-----------------------------------------------
336 s^4 + 146 s^3 + 21 s^2 + s
>> Fi3=feedback(W3,1)
Transfer function:
1.836 s^4 + 16.13 s^3 + 19 s^2 + 5.77 s + 0.396
-----------------------------------------------
337.8 s^4 + 162.1 s^3 + 40 s^2 + 6.77 s + 0.396
>> step(Fi3);grid
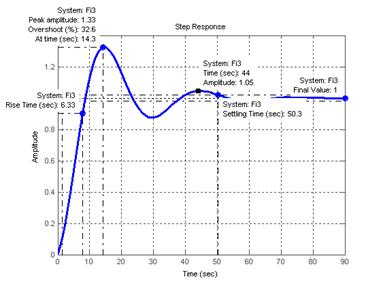
Рисунок 7 – Переходная характеристика САР с ПИД-регулятором
По формуле (3) определяем степень затухания ψ
Script 9:
>> ((1.33-1)-(1.05-1))/(1.33-1)
ans =0.8485
Полученная степень затухания примерно совпадает с заданной, значит параметры настройки регулятора выбраны верно.