

Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Археология об основании Рима: Новые раскопки проясняют и такой острый дискуссионный вопрос, как дата самого возникновения Рима...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Основы обеспечения единства измерений: Обеспечение единства измерений - деятельность метрологических служб, направленная на достижение...
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Интересное:
Что нужно делать при лейкемии: Прежде всего, необходимо выяснить, не страдаете ли вы каким-либо душевным недугом...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Отражение на счетах бухгалтерского учета процесса приобретения: Процесс заготовления представляет систему экономических событий, включающих приобретение организацией у поставщиков сырья...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Анализ САР с П-регулятором
Разработка математической модели типа «вход-состояние-выход»
Основная передаточная функция САР с П-регулятором была получена в п. 1.3. Она имеет вид:
 ,
,
где  ,
,

Порядок характеристического полинома  . Для данной САР выбираем вторую управляемую форму или управляемое каноническое представление (УКП). Математическая модель САР описывается следующей системой векторно-матричных уравнений:
. Для данной САР выбираем вторую управляемую форму или управляемое каноническое представление (УКП). Математическая модель САР описывается следующей системой векторно-матричных уравнений:
|
где 
Script 12:
>> b2=2.397;b1=18.64;b0=5.859;
>> a3=336;a2=148.4;a1=39.64;a0=6.859;
>> A1=[0 1 0;0 0 1;-a0/a3 -a1/a3 -a2/a3];
>> B1=[0;0;1];
>> C1=[b0/a3 b1/a3 b2/a3];
>> D1=0;
>> sys1=ss(A1,B1,C1,D1)
a =
x1 x2 x3
x1 0 1 0
x2 0 0 1
x3 -0.02041 -0.118 -0.4417
b =
u1
x1 0
x2 0
x3 1
c =
x1 x2 x3
y1 0.01744 0.05548 0.007134
d =
u1
y1 0
Continuous-time model.
>> step(sys1);grid

Рисунок 9 – Переходная характеристика САР с П-регулятором
При исользовании модели «вход-выход» и модели «вход-состояние-выход» были получены абсолютно идентичные переходные характеристики (рисунки 4 и 9), следовательно, модель «вход-состояние-выход» для САР с П-регулятором рассчитана, верно.
Структурная схема САР с П-регулятором
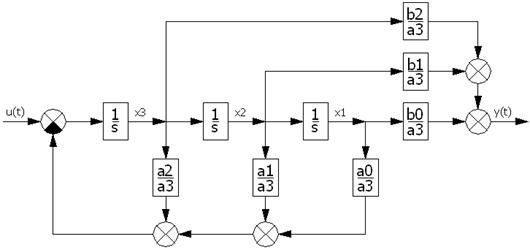
Рисунок 10 – Структурная схема САР с П-регулятором
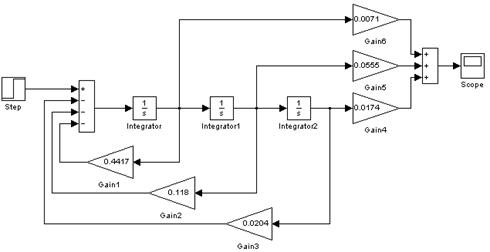
Рисунок 11 – Схема s-модели САР с П-регулятором

Рисунок 12 – Переходная характеристика САР с П-регулятором
Переходная характеристика, полученная по s-модели САР с П-регулятором с помощью пакета Simulink системы MATLAB совпадает с полученными ранее переходными характеристиками, значит s-модель построена верно.
Оценка управляемости САР с П-регулятором
Оценку управляемости САР будем проводить с помощью критерия управляемости Калмана. Матрица управляемости имеет следующий вид:

|
Script 13:
>> Y1=[B1 A1*B1 A1^2*B1]
Y1 =
0 0 1.0000
0 1.0000 -0.4417
1.0000 -0.4417 0.0771
>> rY1=rank(Y1)
rY1 =
3
>> dY1=det(Y1)
dY1 =
-1
Согласно критерию управляемости Калмана исследуемая система полностью управляема, так как ранг матрицы управляемости равен размеру вектора переменных состояния. Определитель матрицы управляемости не равен нулю, значит, она является не вырожденной. Это также означает, что САУ полностью управляема.
Оценка наблюдаемости САР с П-регулятором
Оценку наблюдаемости САР будем проводить с помощью критерия наблюдаемости Калмана. Матрица наблюдаемости имеет следующий вид:

|
Script 14:
>> H1=[C1; C1*A1; C1*A1^2]
H1 =
0.0174 0.0555 0.0071
-0.0001 0.0166 0.0523
-0.0011 -0.0063 -0.0065
>> rH1=rank(H1)
rH1 = 3
>> dH1=det(H1)
dH1 =
8.5991e-007
Согласно критерию наблюдаемости Калмана исследуемая система полностью наблюдаема, так как ранг матрицы наблюдаемости равен размеру вектора переменных состояния. Определитель матрицы наблюдаемости не равен нулю, значит, она является не вырожденной. Это также означает, что САУ полностью наблюдаема.
Анализ САР с ПИ-регулятором
Разработка математической модели типа «вход-состояние-выход»
Основная передаточная функция САР с ПИ-регулятором была получена в п. 1.4. Она имеет вид:
 ,
,
где  ,
,
 .
.
Порядок характеристического полинома  . Для данной САР выбираем вторую управляемую форму или управляемое каноническое представление (УКП). Математическая модель САР описывается следующей системой векторно-матричных уравнений:
. Для данной САР выбираем вторую управляемую форму или управляемое каноническое представление (УКП). Математическая модель САР описывается следующей системой векторно-матричных уравнений:

|
где 
Script 15:
>> b3=1.089;b2=8.558;b1=3.348;b0=0.2156;
>> a4=336;a3=147.1;a2=29.56;a1=4.348;a0=0.2156;
>> A2=[0 1 0 0;0 0 1 0;0 0 0 1;-a0/a4 -a1/a4 -a2/a4 -a3/a4];
>> B2=[0;0;0;1];
>> C2=[b0/a4 b1/a4 b2/a4 b3/a4];
>> D2=0;
>> sys2=ss(A2,B2,C2,D2)
a =
x1 x2 x3 x4
x1 0 1 0 0
x2 0 0 1 0
x3 0 0 0 1
x4 -0.0006417 -0.01294 -0.08798 -0.4378
b =
u1
x1 0
x2 0
x3 0
x4 1
c =
x1 x2 x3 x4
y1 0.0006417 0.009964 0.02547 0.003241
d =
u1
y1 0
Continuous-time model.
>> step(sys2);grid

Рисунок 13 – Переходная характеристика САР с ПИ-регулятором
При исользовании модели «вход-выход» и модели «вход-состояние-выход» были получены абсолютно идентичные переходные характеристики (рисунки 5 и 13), следовательно, модель «вход-состояние-выход» для САР с ПИ-регулятором рассчитана верно.
Структурная схема САР с ПИ-регулятором
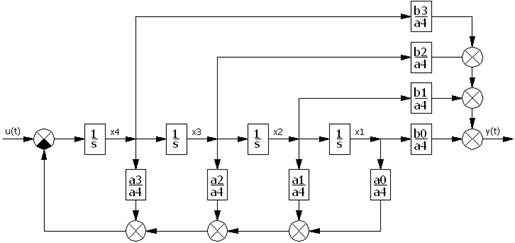
Рисунок 14 – Структурная схема САР с ПИ-регулятором
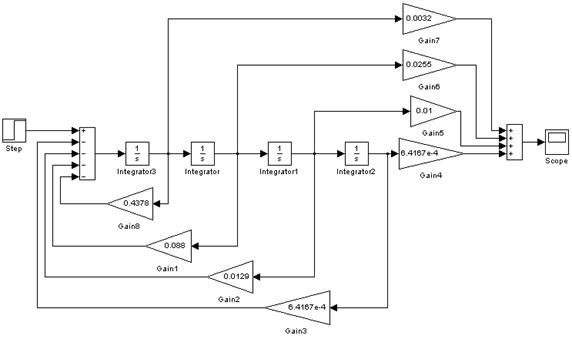
Рисунок 15 – Схема s-модели САР с ПИ-регулятором

Рисунок 16 – Переходная характеристика САР с ПИ-регулятором
Переходная характеристика, полученная по s-модели САР с ПИ-регулятором с помощью пакета Simulink системы MATLAB совпадает с полученными ранее переходными характеристиками, значит s-модель построена, верно.
Оценка управляемости САР с ПИ-регулятором
Оценку управляемости САР будем проводить с помощью критерия управляемости Калмана. Матрица управляемости имеет следующий вид:

|
Script 16:
>> Y2=[B2 A2*B2 A2^2*B2 A2^3*B2]
Y2 =
0 0 0 1.0000
0 0 1.0000 -0.4378
0 1.0000 -0.4378 0.1037
1.0000 -0.4378 0.1037 -0.0198
>> rY2=rank(Y2)
rY2 = 4
>> dY2=det(Y2)
dY2 = 1
Согласно критерию управляемости Калмана исследуемая система полностью управляема, так как ранг матрицы управляемости равен размеру вектора переменных состояния. Определитель матрицы управляемости не равен нулю, значит, она является не вырожденной. Это также означает, что САУ полностью управляема.
Оценка наблюдаемости САР с ПИ-регулятором
Оценку наблюдаемости САР будем проводить с помощью критерия наблюдаемости Калмана. Матрица наблюдаемости имеет следующий вид:
|
Script 17:
>> H2=[C2; C2*A2; C2*A2^2; C2*A2^3]
H2 =
0.0006 0.0100 0.0255 0.0032
-0.0000 0.0006 0.0097 0.0241
-0.0000 -0.0003 -0.0015 -0.0009
0.0000 -0.0000 -0.0002 -0.0011
>> rH2=rank(H2)
rH2 =4
>> dH2=det(H2)
dH2 = -1.2054e-014
Согласно критерию наблюдаемости Калмана исследуемая система полностью наблюдаема, так как ранг матрицы наблюдаемости равен размеру вектора переменных состояния. Определитель матрицы наблюдаемости не равен нулю, значит, она является не вырожденной. Это также означает, что САУ полностью наблюдаема.
Анализ САР с ПИД-регулятором
Разработка математической модели типа «вход-состояние-выход»
Основная передаточная функция САР с ПИД-регулятором была получена в п. 1.5. Она имеет вид:
 ,
,
где  ,
,
 .
.
Порядок характеристического полинома . Математическая модель данной САР описывается следующей системой векторно-матричных уравнений:
|
где 
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Script 18:
>> b4=1.836;b3=16.13;b2=19;b1=5.77;b0=0.396;
>> a4=337.8;a3=162.1;a2=40;a1=6.77;a0=0.396;
>> v0=b4/a4;
>> v1=(b3-v0*a3)/a4;
>> v2=(b2-v0*a2-v1*a3)/a4;
>> v3=(b1-v0*a1-v1*a2-v2*a3)/a4;
>> v4=(b0-v0*a0-v1*a1-v2*a2-v3*a3)/a4;
>> A3=[0 1 0 0;0 0 1 0;0 0 0 1;-a0/a4 -a1/a4 -a2/a4 -a3/a4];
>> B3=[v1;v2;v3;v4];
>> C3=[1 0 0 0];
>> D3=v0;
>> sys3=ss(A3,B3,C3,D3)
a =
x1 x2 x3 x4
x1 0 1 0 0
x2 0 0 1 0
x3 0 0 0 1
x4 -0.001172 -0.02004 -0.1184 -0.4799
b =
u1
x1 0.04514
x2 0.03394
x3 -0.00466
x4 -0.001521
c =
x1 x2 x3 x4
y1 1 0 0 0
d =
u1
y1 0.005435
Continuous-time model.
>> step(sys3);grid
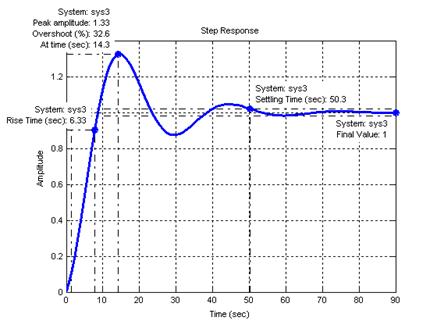
Рисунок 17 – Переходная характеристика САР с ПИД-регулятором
При исользовании модели «вход-выход» и модели «вход-состояние-выход» были получены абсолютно идентичные переходные характеристики (рисунки 7 и 17), следовательно, модель «вход-состояние-выход» для САР с ПИД-регулятором рассчитана, верно.
Структурная схема САР с ПИД-регулятором
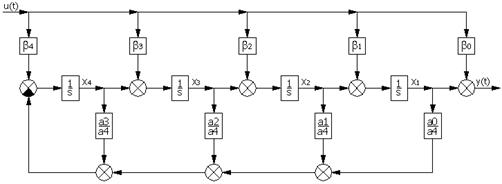
Рисунок 18 – Структурная схема САР с ПИД-регулятором
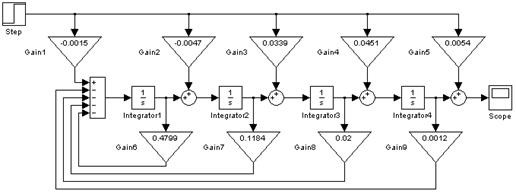
Рисунок 19 – Схема s-модели САР с ПИД-регулятором
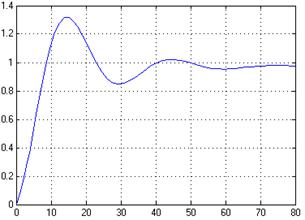
Рисунок 20 – Переходная характеристика САР с ПИД-регулятором
Переходная характеристика, полученная по s-модели САР с ПИД-регулятором с помощью пакета Simulink системы MATLAB совпадает с полученными ранее переходными характеристиками, значит s-модель построена, верно.
Оценка управляемости САР с ПИД-регулятором
Оценку управляемости САР будем проводить с помощью критерия управляемости Калмана. Матрица управляемости имеет вид (15):

|
Script 19:
>> Y3=[B3 A3*B3 A3^2*B3 A3^3*B3]
Y3 =
0.0451 0.0339 -0.0047 -0.0015
0.0339 -0.0047 -0.0015 0.0005
-0.0047 -0.0015 0.0005 -0.0000
-0.0015 0.0005 -0.0000 -0.0000
>> rY3= rank(Y3)
rY3 = 4
>> dY3=det(Y3)
dY3 = -1.6937e-014
Согласно критерию управляемости Калмана исследуемая система полностью управляема, так как ранг матрицы управляемости равен размеру вектора переменных состояния. Определитель матрицы управляемости не равен нулю, значит, она является не вырожденной. Это также означает, что САУ полностью управляема.
Оценка наблюдаемости САР с ПИД-регулятором
Оценку наблюдаемости САР будем проводить с помощью критерия наблюдаемости Калмана. Матрица наблюдаемости имеет следующий вид:
|
Script 20:
>> H3=[C3;C3*A3;C3*A3^2;C3*A3^3]
H3 =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
>> rH3=rank(H3)
rH3 = 4
>> dH3=det(H3)
dH3 = 1
Согласно критерию наблюдаемости Калмана исследуемая система полностью наблюдаема, так как ранг матрицы наблюдаемости равен размеру вектора переменных состояния. Определитель матрицы наблюдаемости не равен нулю, значит, она является не вырожденной. Это также означает, что САУ полностью наблюдаема.
Анализ нелинейной САР
Описание нелинейной САР
Cтруктурная схема нелинейной САР представлена на рисунке 21.

Рисунок 21 – Структурная схема нелинейной САР
Роль АР выполняет ПИ-регулятор с передаточной функцией, полученной в п. 1.4:
 .
.
Нелинейное звено – звено с насыщением (ограничением), статическая характеристика звена изображена на рисунке 22.

Рисунок 22 – Статическая характеристика нелинейного элемента
Параметры звена с насыщением:  .
.
Оценка возможности возникновения автоколебаний
Для оценки возможности и устойчивости автоколебаний в нелинейной САР по методу Гольдфарба необходимо линеаризовать систему. Применим к нелинейному элементу гармоническую линеаризацию. Тогда передаточная функция звена с насыщением будет иметь вид:
 , ,
|
где  ,
,
 при
при  , т. е.
, т. е.  .
.
Таким образом, передаточная функция нелинейного элемента принимает вид:
 .
.
Условие возникновения автоколебаний:
 , ,
|
или
 , ,
|
где  ,
,
 – передаточная функция линейной части разомкнутой САР с ПИ-регулятором (см. п. 1.4).
– передаточная функция линейной части разомкнутой САР с ПИ-регулятором (см. п. 1.4).
Уравнение (19) решаем графически. Для этого необходимо построить на одной комплексной плоскости годограф Найквиста линейной части и годограф Гольдфарба  .
.
Script 21:
>> A=0.001:0.001:5;
>> Wnon=(2./pi).*(asin(2.4./A)+(2.4./A).*sqrt(1-5.76./A.^2));
>> Z=-1./(Wnon);
>> Re=real(Z);
>> Im=imag(Z);
>> w=0.1:0.01:1;
>> W2=(b3*(j*w).^3+b2*(j*w).^2+b1*(j*w)+b0)./ ...
(a4*(j*w).^4+a3*(j*w).^3+a2*(j*w).^2+a1*(j*w));
>> re=real(W2);
>> im=imag(W2);
>> plot(re,im,Re,Im);grid
Построенные в результате выполнения Script 21 годографы приведены на рисунке 23. На рисунке 24 показана увеличенно область, в которой годографы могут пересекаться. Видно, что годографы не пересекаются, значит автоколебания в системе невозможны.

Рисунок 23 – Годографы линеаризованной САР
Рисунок 24 – Годографы линеаризованной САР (увеличенно)
Моделирование нелинейной САР в Simulink
Для подтверждения сделанных выводов построим модель САР в Simulink. Схема модели изображена на рисунке 25, переходная характеристика, полученная с помощью этой модели – на рисунке 26.

Рисунок 25 – Схема s-модели нелинейной САР
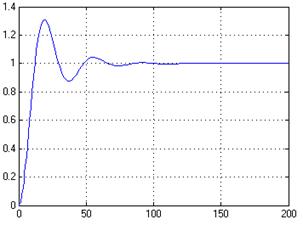
Рисунок 26 – Переходная характеристика нелинейной САР
Очевидно, что автоколебаний в системе нет, значит, расчеты и вывод о том, что в системе невозможны автоколебания, были сделаны верно.
Заключение
В ходе выполнения курсового проекта был произведен анализ объекта регулирования, построены кривая разгона ОР.
В результате проведения необходимых расчетов были определены оптимальные параметры настройки П, ПИ, ПИД-регуляторов, запас устойчивости систем, оценено качество переходных процессов САР с П, ПИ, ПИД-регуляторами. Также был проведен анализ наблюдаемости и управляемости САР: система со всеми тремя регуляторами оказалась полностью наблюдаемой и управляемой.
Для случая, когда регулирующий орган имеет нелинейную характеристику был проведен анализ на возможность возникновения автоколебаний в нелинейной системе регулирования методом Гольдфарба. Установлено, что автоколебания в системе невозможны. Невозможность автоколебаний подтверждена моделированием системы в Simulink.
|
|
|

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

Биохимия спиртового брожения: Основу технологии получения пива составляет спиртовое брожение, - при котором сахар превращается...
© cyberpedia.su 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

