Микропроцессорные информационно-управляющие системы
Что такое микропроцессор?
Ядром любой микропроцессорной системы является микропроцессор или просто процессор (от английского processor). Перевести на русский язык это слово правильнее всего как "обработчик", так как именно микропроцессор — это тот узел, блок, который производит всю обработку информации внутри микропроцессорной системы . Остальные узлы выполняют всего лишь вспомогательные функции: хранение информации (в том числе и управляющей информации, то есть программы), связи с внешними устройствами, связи с пользователем и т.д. Процессор заменяет практически всю "жесткую логику", которая понадобилась бы в случае традиционной цифровой системы. Он выполняет арифметические функции (сложение, умножение и т.д.), логические функции (сдвиг, сравнение, маскирование кодов и т.д.), временное хранение кодов (во внутренних регистрах), пересылку кодов между узлами микропроцессорной системы и многое другое. Количество таких элементарных операций, выполняемых процессором, может достигать нескольких сотен. Процессор можно сравнить с мозгом системы.
Но при этом надо учитывать, что все свои операции процессор выполняет последовательно, то есть одну за другой, по очереди. Конечно, существуют процессоры с параллельным выполнением некоторых операций, встречаются также микропроцессорные системы, в которых несколько процессоров работают над одной задачей параллельно, но это редкие исключения. С одной стороны, последовательное выполнение операций — несомненное достоинство, так как позволяет с помощью всего одного процессора выполнять любые, самые сложные алгоритмы обработки информации. Но, с другой стороны, последовательное выполнение операций приводит к тому, что время выполнения алгоритма зависит от его сложности. Простые алгоритмы выполняются быстрее сложных. То есть микропроцессорная система способна сделать все, но работает она не слишком быстро, ведь все информационные потоки приходится пропускать через один-единственный узел — микропроцессор (рис.HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=1" HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=1"1.3). В традиционной цифровой системе можно легко организовать параллельную обработку всех потоков информации, правда, ценой усложнения схемы.
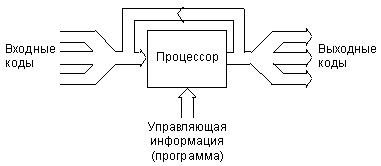
Рис. 1.3. Информационные потоки в микропроцессорной системе.
Итак, микропроцессор способен выполнять множество операций. Но откуда он узнает, какую операцию ему надо выполнять в данный момент? Именно это определяется управляющей информацией, программой. Программа представляет собой набор команд (инструкций), то есть цифровых кодов, расшифровав которые, процессор узнает, что ему надо делать. Программа от начала и до конца составляется человеком, программистом, а процессор выступает в роли послушного исполнителя этой программы, никакой инициативы он не проявляет (если, конечно, исправен). Поэтому сравнение процессора с мозгом не слишком корректно. Он всего лишь исполнитель того алгоритма, который заранее составил для него человек. Любое отклонение от этого алгоритма может быть вызвано только неисправностью процессора или каких-нибудь других узлов микропроцессорной системы.
Все команды, выполняемые процессором, образуют систему команд процессора. Структура и объем системы команд процессора определяют его быстродействие, гибкость, удобство использования. Всего команд у процессора может быть от нескольких десятков до нескольких сотен. Система команд может быть рассчитана на узкий круг решаемых задач (у специализированных процессоров) или на максимально широкий круг задач (у универсальных процессоров). Коды команд могут иметь различное количество разрядов (занимать от одного до нескольких байт). Каждая команда имеет свое время выполнения, поэтому время выполнения всей программы зависит не только от количества команд в программе, но и от того, какие именно команды используются.
Для выполнения команд в структуру процессора входят внутренние регистры, арифметико-логическое устройство (АЛУ, ALU — Arithmetic Logic Unit) , мультиплексоры, буферы, регистры и другие узлы. Работа всех узлов синхронизируется общим внешним тактовым сигналом процессора. То есть процессор представляет собой довольно сложное цифровое устройство (рис.HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=1" HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=1"1.4).
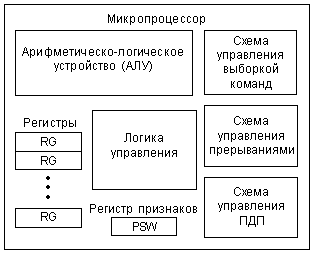
Рис. 1.4. Пример структуры простейшего процессора.
Впрочем, для разработчика микропроцессорных систем информация о тонкостях внутренней структуры процессора не слишком важна. Разработчик должен рассматривать процессор как "черный ящик", который в ответ на входные и управляющие коды производит ту или иную операцию и выдает выходные сигналы. Разработчику необходимо знать систему команд, режимы работы процессора, а также правила взаимодействия процессора с внешним миром или, как их еще называют, протоколы обмена информацией. О внутренней структуре процессора надо знать только то, что необходимо для выбора той или иной команды, того или иного режима работы.
Шинная структура связей
Для достижения максимальной универсальности и упрощения протоколов обмена информацией в микропроцессорных системах применяется так называемая шинная структура связей между отдельными устройствами, входящими в систему. Суть шинной структуры связей сводится к следующему.

Рис. 1.5. Классическая структура связей.
При классической структуре связей (рис.HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2" HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2"1.5) все сигналы и коды между устройствами передаются по отдельным линиям связи. Каждое устройство, входящее в систему, передает свои сигналы и коды независимо от других устройств. При этом в системе получается очень много линий связи и разных протоколов обмена информацией.
При шинной структуре связей (рис.HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2" HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2"1.6) все сигналы между устройствами передаются по одним и тем же линиям связи, но в разное время (это называется мультиплексированной передачей). Причем передача по всем линиям связи может осуществляться в обоих направлениях (так называемая двунаправленная передача). В результате количество линий связи существенно сокращается, а правила обмена (протоколы) упрощаются. Группа линий связи, по которым передаются сигналы или коды как раз и называется шиной (англ. bus).
Понятно, что при шинной структуре связей легко осуществляется пересылка всех информационных потоков в нужном направлении, например, их можно пропустить через один процессор, что очень важно для микропроцессорной системы. Однако при шинной структуре связей вся информация передается по линиям связи последовательно во времени, по очереди, что снижает быстродействие системы по сравнению с классической структурой связей.

Рис. 1.6. Шинная структура связей.
Большое достоинство шинной структуры связей состоит в том, что все устройства, подключенные к шине, должны принимать и передавать информацию по одним и тем же правилам (протоколам обмена информацией по шине). Соответственно, все узлы, отвечающие за обмен с шиной в этих устройствах, должны быть единообразны, унифицированы.
Существенный недостаток шинной структуры связан с тем, что все устройства подключаются к каждой линии связи параллельно. Поэтому любая неисправность любого устройства может вывести из строя всю систему, если она портит линию связи. По этой же причине отладка системы с шинной структурой связей довольно сложна и обычно требует специального оборудования.
В системах с шинной структурой связей применяют все три существующие разновидности выходных каскадов цифровых микросхем:
стандартный выход или выход с двумя состояниями (обозначается 2С, 2S, реже ТТЛ, TTL);
выход с открытым коллектором (обозначается ОК, OC);
выход с тремя состояниями или (что то же самое) с возможностью отключения (обозначается 3С, 3S).
Упрощенно эти три типа выходных каскадов могут быть представлены в виде схем на рис.HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2" HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2"1.7.
У выхода 2С два ключа замыкаются по очереди, что соответствует уровням логической единицы (верхний ключ замкнут) и логического нуля (нижний ключ замкнут). У выхода ОК замкнутый ключ формирует уровень логического нуля, разомкнутый — логической единицы. У выхода 3С ключи могут замыкаться по очереди (как в случае 2С), а могут размыкаться одновременно, образуя третье, высокоимпедансное состояние. Переход в третье состояние (Z-состояние) управляется сигналом на специальном входе EZ.

Рис. 1.7. Три типа выходов цифровых микросхем.
Выходные каскады типов 3С и ОК позволяют объединять несколько выходов микросхем для получения мультиплексированных (рис.HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2" HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2"1.8) или двунаправленных (рис.HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2" HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2"1.9) линий.

Рис. 1.8. Мультиплексированная линия.
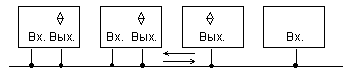
Рис. 1.9. Двунаправленная линия.
При этом в случае выходов 3С необходимо обеспечить, чтобы на линии всегда работал только один активный выход, а все остальные выходы находились бы в это время в третьем состоянии, иначе возможны конфликты. Объединенные выходы ОК могут работать все одновременно, без всяких конфликтов.
Типичная структура микропроцессорной системы приведена на рис.HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2" HYPERLINK "http://www.intuit.ru/studies/courses/3/3/lecture/62?page=2"1.10. Она включает в себя три основных типа устройств:
процессор;
память, включающую оперативную память (ОЗУ, RAM — Random Access Memory) и постоянную память (ПЗУ, ROM —Read Only Memory ), которая служит для хранения данных и программ;
устройства ввода/вывода (УВВ, I/O — Input/Output Devices), служащие для связи микропроцессорной системы с внешними устройствами, для приема (ввода, чтения, Read) входных сигналов и выдачи (вывода, записи, Write) выходных сигналов.
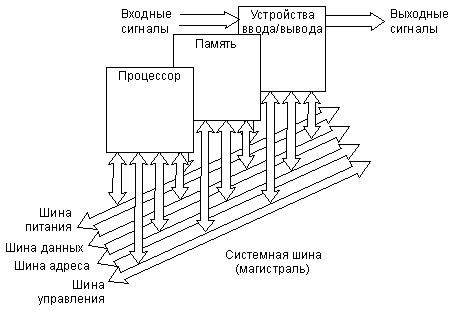
Рис. 1.10. Структура микропроцессорной системы.
Все устройства микропроцессорной системы объединяются общей системной шиной (она же называется еще системной магистралью или каналом). Системная магистраль включает в себя четыре основные шины нижнего уровня:
шина адреса (Address Bus);
шина данных (Data Bus);
шина управления (Control Bus);
шина питания (Power Bus).
Шина адреса служит для определения адреса (номера) устройства, с которым процессор обменивается информацией в данный момент. Каждому устройству (кроме процессора), каждой ячейке памяти в микропроцессорной системе присваивается собственный адрес. Когда код какого-то адреса выставляется процессором на шине адреса, устройство, которому этот адрес приписан, понимает, что ему предстоит обмен информацией. Шина адреса может быть однонаправленной или двунаправленной.
Шина данных — это основная шина, которая используется для передачи информационных кодов между всеми устройствами микропроцессорной системы. Обычно в пересылке информации участвует процессор, который передает код данных в какое-то устройство или в ячейку памяти или же принимает код данных из какого-то устройства или из ячейки памяти. Но возможна также и передача информации между устройствами без участия процессора. Шина данных всегда двунаправленная.
Шина управления в отличие от шины адреса и шины данных состоит из отдельных управляющих сигналов. Каждый из этих сигналов во время обмена информацией имеет свою функцию. Некоторые сигналы служат для стробирования передаваемых или принимаемых данных (то есть определяют моменты времени, когда информационный код выставлен на шину данных). Другие управляющие сигналы могут использоваться для подтверждения приема данных, для сброса всех устройств в исходное состояние, для тактирования всех устройств и т.д. Линии шины управления могут быть однонаправленными или двунаправленными.
Наконец, шина питания предназначена не для пересылки информационных сигналов, а для питания системы. Она состоит из линий питания и общего провода. В микропроцессорной системе может быть один источник питания (чаще +5 В) или несколько источников питания (обычно еще –5 В, +12 В и –12 В). Каждому напряжению питания соответствует своя линия связи. Все устройства подключены к этим линиям параллельно.
Если в микропроцесссорную систему надо ввести входной код (или входной сигнал), то процессор по шине адреса обращается к нужному устройству ввода/вывода и принимает по шине данных входную информацию. Если из микропроцессорной системы надо вывести выходной код (или выходной сигнал), то процессор обращается по шине адреса к нужному устройству ввода/вывода и передает ему по шине данных выходную информацию.
Если информация должна пройти сложную многоступенчатую обработку, то процессор может хранить промежуточные результаты в системной оперативной памяти. Для обращения к любой ячейке памяти процессор выставляет ее адрес на шину адреса и передает в нее информационный код по шине данных или же принимает из нее информационный код по шине данных. В памяти (оперативной и постоянной) находятся также и управляющие коды (команды выполняемой процессором программы), которые процессор также читает по шине данных с адресацией по шине адреса. Постоянная память используется в основном для хранения программы начального пуска микропроцессорной системы, которая выполняется каждый раз после включения питания. Информация в нее заносится изготовителем раз и навсегда.
Таким образом, в микропроцессорной системе все информационные коды и коды команд передаются по шинам последовательно, по очереди. Это определяет сравнительно невысокое быстродействие микропроцессорной системы. Оно ограничено обычно даже не быстродействием процессора (которое тоже очень важно) и не скоростью обмена по системной шине (магистрали), а именно последовательным характером передачи информации по системной шине (магистрали).
Важно учитывать, что устройства ввода/вывода чаще всего представляют собой устройства на "жесткой логике". На них может быть возложена часть функций, выполняемых микропроцессорной системой. Поэтому у разработчика всегда имеется возможность перераспределять функции системы между аппаратной и программной реализациями оптимальным образом. Аппаратная реализация ускоряет выполнение функции, но имеет недостаточную гибкость. Программная реализация значительно медленнее, но обеспечивает высокую гибкость. Аппаратная реализация функций увеличивает стоимость системы и ее энергопотребление, программная — не увеличивает. Чаще всего применяется комбинирование аппаратных и программных функций.
Иногда устройства ввода/вывода имеют в своем составе процессор, то есть представляют собой небольшую специализированную микропроцессорную систему. Это позволяет переложить часть программных функций на устройства ввода/вывода, разгрузив центральный процессор системы.
Внутренние интерфейсы
| Стандарт
| Типичное применение
| Пиковая пропускная способность
| Примечания
|
| ISA
| Звуковые карты, модемы
| 2Мбит/сдо8,ЗЗМбит/с
| Практически не используется начиная с 1999 г.
|
| EISA
| Сети, адаптеры SCSI
| 33 Мбит/с
| Практически не используется, замещается PCI
|
| PCI
| Графические карты, адаптеры SCSI, звуковые карты новых поколений
| 133 Мбит/с (32-битовая шина с частотой 33 МГц)
| Стандарт для периферийных устройств
|
| PCI-X
|
| 1 Гбит/с (64-битовая шина с частотой 133 МГц)
| Расширение PCI, предложенное IBM, HP, Compaq. Увеличена скорость и количество устройств
|
| PCI Express
|
| До 16 Гбит/с
| Разработка "интерфейса 3-го поколения" ( Third generation Input/Output -3GIO ), заменяет AGP. Последовательная шина
|
| AGP
| Графические карты
| 528 Мбит/с, 2х-графика (2х-графические карты)
| Стандарт для Intel-PC начиная с Pentium II, сосуществует с PCI
|
| AGP PRO
| ЗD -графика
| 800 Мбит/с (4х-графика)
| Поддерживает видеокарты, потребляющие мощность до 100BT( AGP-flo25BT )
|
Например : ШИНА PCI (PERIPHERAL COMPONENT INTERCONNECT BUS)
Разработка шины PCI закончилась в июне 1992 года как внутренний проект корпорации Intel. Основные возможности шины следующие:
• синхронный 32- или 64-разрядный обмен данными (64-разрядная шина в настоящее время используется только в Alpha-системах и серверах на базе процессоров Intel Xeon). При этом для уменьшения числа контактов (и стоимости) используется мультиплексирование, то есть адрес и данные передаются по одним и тем же линиям;
• частота работы шины 33 или 66 МГц (в версии 2.1) позволяет обеспечить широкий диапазон пропускных способностей (с использованием пакетного режима);
• полная поддержка многих активных устройств (например, несколько контроллеров жестких дисков могут одновременно работать на шине);
• спецификация шины позволяет комбинировать до восьми функций на одной карте (например, видео, звук и так далее).
Внешние интерфейсы
Для интерфейса, соединяющего (физически или логически) два устройства, различают три возможных режима обмена - дуплексный, полудуплексный и симплексный.
Режимы обмена информации
Дуплексный режим позволяет по одному каналу связи одновременно передавать информацию в обоих направлениях. Он может быть асимметричным, если пропускная способность в противоположных направлениях имеет существенно различающиеся значения, или симметричным.
Полудуплексный режим позволяет передавать информацию в противоположных направлениях поочередно, при этом интерфейс имеет средства переключения направления канала.
Симплексный (односторонний) режим предусматривает только одно направление передачи информации (во встречном направлении передаются только вспомогательные сигналы интерфейса).
Параллельный интерфейс
IEEE 1284 (параллельный порт, LPT) - международный стандарт параллельного интерфейса для подключения периферийных устройств персонального компьютера.
В основном используется для подключения к компьютеру принтера, сканера и других внешних устройств (часто использовался для подключения внешних устройств хранения данных), однако может применяться и для других целей, например для организации связи между двумя компьютерами и т.д.. В основе данного стандарта лежит интерфейс Centronics и его расширенные версии ( ECP, EPP ).
Последовательный интерфейс
Последовательный порт или COM-порт (произносится "ком-порт", от англ. COMmunication port ) - двунаправленный последовательный интерфейс, предназначенный для обмена байтовой информацией. Последовательный потому, что информация через него передаeтся по одному биту, бит за битом (в отличие от параллельного порта). Наиболее часто для последовательного порта персональных компьютеров используется стандарт RS-232C. Ранее последовательный порт использовался для подключения терминала, позже для сканера, модема или мыши. Сейчас он используется для соединения с источниками бесперебойного питания, для связи с аппаратными средствами разработки встраиваемых вычислительных систем.
USB (англ. Universal Serial Bus) - универсальная последовательная шина, предназначенная для подключения периферийных устройств. Шина USB представляет собой последовательный интерфейс передачи данных для среднескоростных и низкоскоростных периферийных устройств.
Для подключения периферийных устройств к шине USB используется четырeхпроводный кабель, при этом два провода в дифференциальном включении используются для приeма и передачи данных, а два провода - для питания периферийного устройства. Благодаря встроенным линиям питания, USB позволяет подключать периферийные устройства без собственного источника питания (максимальная сила тока, потребляемого устройством по линиям питания шины USB, не должна превышать 500 мА).
FireWire IEEE 1394 (FireWire, i-Link) - последовательная высокоскоростная шина, предназначенная для обмена цифровой информацией между компьютером и другими электронными устройствами.
IrDA - Infrared Data Association, ИК-порт, Инфракрасный порт - группа стандартов, описывающая протоколы физического и логического уровня передачи данных с использованием инфракрасного диапазона световых волн в качестве носителя.
Bluetooth "ВТ" (синий зуб) - это фактический стандарт на миниатюрные недорогие средства передачи информации на небольшие расстояния посредством радиосвязи между мобильными (и настольными) компьютерами, мобильными телефонами и любыми другими портативными устройствами.
Wi-Fi (англ. Wireless Fidelity - "беспроводная точность") - стандарт на оборудование Wireless LAN.
Разработан консорциумом Wi-Fi Alliance на базе стандартов IEEE 802.11.
Обычно схема Wi-Fi сети содержит не менее одной точки доступа и не менее одного клиента. Также возможно подключение двух клиентов в режиме точка-точка, когда точка доступа не используется, а клиенты соединяются посредством сетевых адаптеров "напрямую". Точка доступа передает свой идентификатор сети ( SSID ) с помощью специальных сигнальных пакетов на скорости 0.1 Mбит/с каждые 100 мс. Так что 0.1 Mбит/с - наименьшая скорость передачи данных для Wi-Fi. Зная SSID сети, клиент может выяснить, возможно ли подключение к данной точке доступа. При попадании в зону действия двух точек доступа с идентичными SSID, приeмник может выбирать между ними на основании данных об уровне сигнала.
Локальная вычислительная сеть (ЛВС, локальная сеть; (англ. Local Area Network, LAN - компьютерная сеть, покрывающая обычно относительно небольшую территорию или небольшую группу зданий (дом, офис, фирму, институт).
Лекция 3.
1.3. ТИПОВАЯ СТРУКТУРА СИСТЕМЫ УПРАВЛЕНИЯ
В общем случае система цифрового управления физическим/техническим процессом состоит из следующих компонентов (рис. 1.4) [1]:
• управляющая ЭВМ (УВМ);
• каналы обмена информацией;
• аналого-цифровые и цифро-аналоговые преобразователи (АЦП и ЦАП);
• датчики и исполнительные механизмы;
• сам физический/технический процесс.
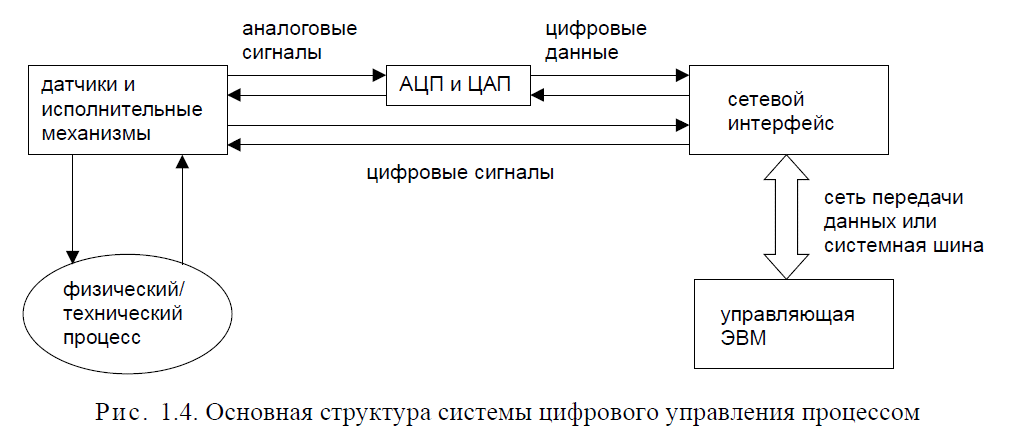
Физический процесс контролируется с помощью датчиков, т.е. устройств, преобразующих физические параметры процесса (температуру, давление или координаты) в электрические величины, которые можно непосредственно измерить (сопротивление, ток или разность потенциалов). Непосредственное влияние на процесс осуществляется с помощью исполнительных механизмов. Они преобразуют электрические сигналы в физические воздействия, главным образом движение – перемещение или вращение, которые можно использовать для разных целей, например, для открытия или закрытия заслонки.
Цифровые системы управления работают только с информацией, представленной в цифровой форме, поэтому полученные в результате измерений электрические величины необходимо обработать с помощью АЦП. Обратная операция – управление исполнительными механизмами – несколько проще, поскольку компьютер может непосредственно вырабатывать электрические сигналы.
Информация от удалённых объектов через каналы связи поступает к управляющему компьютеру, который:
• интерпретирует все поступающие от физического процесса данные;
• принимает решения в соответствии с алгоритмами программ обработки;
• посылает управляющие сигналы;
• обменивается информацией с человеком-оператором и реагирует на его команды.
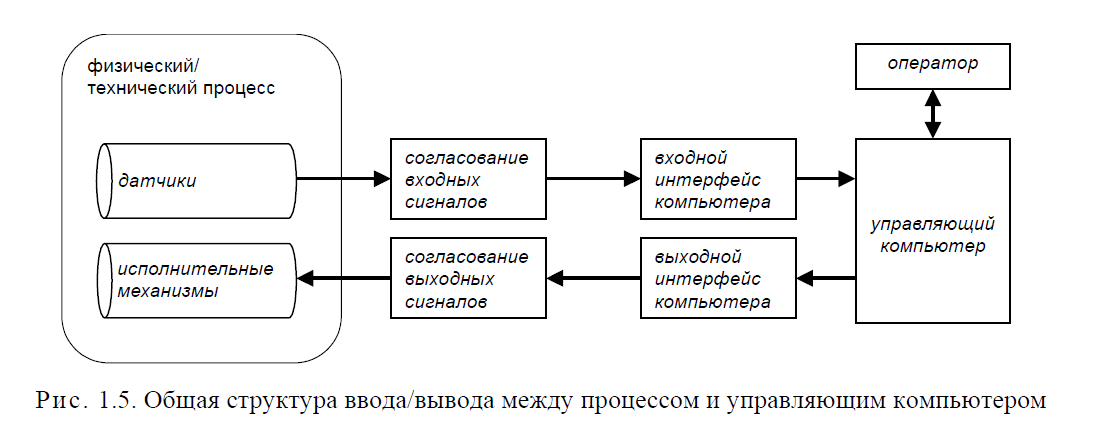
1.4. КОМПОНЕНТЫ ИНТЕРФЕЙСА МЕЖДУ ПРОЦЕССОМ И УПРАВЛЯЮЩИМ КОМПЬЮТЕРОМ
Общая структура ввода/вывода между процессом и управляющим компьютером показана на рис. 1.5. Хотя на практике используются разнообразные датчики, исполнительные механизмы и согласующие устройства, основная структура интерфейса всегда одна и та же.
Рабочий цикл ПЛК
Обмен данными между ПЛК и управляемым технологическим процессом (датчиками и исполнительными механизмами) является неотъемлемой частью АСУ ТП. Поэтому в большинстве ПЛК операция опроса состояния входов и установки нужных значений на выходах реализуется системным программным обеспечением ПЛК и не требует никаких усилий со стороны программиста. Такие программируемые контроллеры работают по методу периодического опроса входных данных. Именно на такую модель опирается стандарт МЭК 61131-3.
Рабочий цикл ПЛК включает четыре фазы [18]:
• опрос входов;
• выполнение пользовательской программы;
• установку значений выходов;
• некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, сетевой обмен и т.д).
Прикладная программа имеет дело с одномоментной копией значений входов. Внутри одного цикла выполнения программы, значения входов можно считать константами. Такая модель упрощает анализ и программирование сложных алгоритмов. Очевидно, что время реакции ПЛК на изменение значения на входе будет зависеть от времени выполнения одной итерации прикладной программы – одного цикла ПЛК.
Такая организация работы ПЛК обеспечивает:
• неизменность входных переменных в течение рабочего цикла;
• гарантированное время постоянства значений на выходных каналах контроллера (изменение не чаще чем один раз в рабочий цикл);
• возможность оценивать и управлять длительностью рабочего цикла всего приложения.
Для доступа программиста к значениям на входах и выходах ПЛК выделяются специальные области памяти. Чаще всего, это либо две области: область памяти входов и область памяти выходов, либо четыре: области памяти дискретных и аналоговых входов и области памяти дискретных и аналоговых выходов. Тогда рабочий цикл ПЛК можно представить следующим образом (рис. 2.8).
Входные дискретные и аналоговые сигналы обрабатываются модулями дискретного ввода (Discrete Input, DI) и аналогового ввода (Analog Input, AI) и в виде двоичного кода записываются в области памяти входов (первая фаза).
Во время исполнения программы (вторая фаза) используются данные изо всех областей памяти. В результате исполнения программы рассчитываются новые значения внутренних переменных, а также значения, которые должны быть установлены на выходах контроллера. Рассчитанные значения размещаются в соответствующих областях памяти (см. рис. 2.8).

Во время третьей фазы цифровые значения из областей выходов пересылаются в модули дискретного вывода (Discrete Output, DO) и аналогового вывода (Analog Output, AO) соответственно, модули преобразуют их в соответствующие значения тока или напряжения на своих выходах.
Четвёртая фаза используется, например, для обмена данными по сети.
Распределённый ввод/вывод
Количество модулей расширения, подключаемых на одну шину с модулем центрального процессора, ограничено электрическими характеристиками системной шины. Для того чтобы подключить большее количество модулей используются технологии удалённого и распределённого ввода/вывода (такую терминологию использует компания Schneider Electric). Дополнительные модули ввода вывода подключаются к специальному модулю – станции расширения, которая опрашивает подключенные к ней модули ввода-вывода и обменивается информацией с модулем центрального процессора по последовательному интерфейсу (рис. 2.11). При этом модули, подключаемые на одну шину с модулем центрального процессора, называются локальным вводом-выводом.
Главная особенность удалённого ввода-вывода − использование закрытого стандарта для организации интерфейса между ПЛК и станцией расширения. Поэтому его характеристики могут весьма сильно отличаться для разных фирм производителей. Например, контроллеры Siemens серии S7-300 используют пару интерфейсных модулей (ИМ, рис. 2.11) со встроенным кабелем связи длиной до четырёх метров. Платформа Quantum компании Schneider Electric предлагает использование специальных модулей для организации удалённого ввода-вывода на расстоянии до 800 метров (Remote I/O). Платформа Premium компании Schneider Electric вообще не использует интерфейсные модули. Для того чтобы организовать удалённый ввод-вывод предлагается использовать специальные расширяемые рейки с разъёмами расширения шины, кабель (до 12 метров) и терминаторы для нормализации волновых сопротивлений на концах шины.

Для организации удалённого ввода-вывода некоторые производители предлагают использовать интерфейс программирования ПЛК, встроенный в модуль центрального процессора.
При распределённом вводе-выводе для организации связи используется стандартная промышленная сеть. В этом случае в качестве станции расширения выступает коммуникационный контроллер (КК, рис. 2.11), который обеспечивает поддержку протокола промышленной сети.
Режимы работы ПЛК
В каждый момент времени ПЛК находится в одном из состояний [22]:
• выключен (OFF);
• останов (STOP);
• запуск или рестарт (STARTUP);
• выполнение (RUN);
• неисправность (ERROR).
В состоянии «выключен» ПЛК находится при отсутствии напряжения питания. После включения питания контроллер переходит в состояние «останов».
В состоянии «останов» ПЛК проверяет, существуют ли фактически все конфигурированные модули, и устанавливает выходы в предварительно определённое начальное состояние. В состоянии «останов» программа пользователя не выполняется.
В состоянии «запуск» различают типы запуска «холодный рестарт», «теплый рестарт» и «горячий рестарт».
При теплом рестарте рабочий цикл ПЛК начинается с опроса входов контроллера при текущих значениях всех внутренних переменных программы. Теплый рестарт – это повторный запуск, который выполняется вручную после перехода в состояние «останов» в случае появления критического события (неисправности) обработка которого не описана в программе контроллера (например, срабатывание сторожевого таймера).
При холодном рестарте рабочий цикл ПЛК начинается с начала (также при теплом рестарте). Все внутренние переменные принимают предварительно заданные значения из загрузочной памяти. Холодный рестарт может быть автоматическим (например, после пропадания питания, потери информации, хранящейся в оперативной памяти) или ручным (например, с помощью кнопки перезапуска).
При горячем рестарте выполнение программы возобновляется в точке приостанова программы. ГОСТ Р 51840-2001 [20] определяет горячий рестарт как повторный запуск после пропадания питания в течение максимально допустимого промежутка времени при котором происходит восстановление работоспособности ПЛК, как если бы пропадания питания и не было. Возможность горячего рестарта требует наличия автономно питаемого таймера для определения времени отсутствия питания, а также наличия доступных пользователю средств для задания максимального времени отсутствия питания для обслуживаемого технологического процесса. Горячий рестарт поддерживается далеко не всеми контроллерами.
Первый запуск после загрузки в контроллер конфигурации или программы выполняется в режиме холодного рестарта. После успешного рестарта контроллер переходит в состояние «выполнение».
В состоянии «выполнение» ПЛК выполняет программу пользователя, обновляет входы и выходы, обслуживает прерывания и обрабатывает сообщения об ошибках.
При возникновении отказа, либо какого-то иного события, обработка которого не реализована в программе контроллера, ПЛК переходит в состояние «неисправность». Состояние «неисправность» фактически соответствует состоянию «останов», за одним исключением – на модуле центрального процессора загорается индикатор неисправности, а в диагностический буфер ПЛК заносится запись о времени и типе возникшей неисправности.
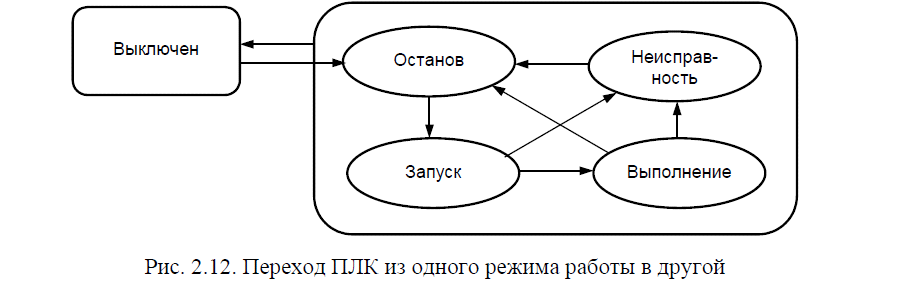
На рис. 2.12 представлена карта переходов ПЛК из состояния в состояние. При включении контроллер попадает в состояние «останов». В состояние «выключен» контроллер может перейти из любого другого состояния при отключении питания. Из состояния «останов», контроллер переходит в состояние «запуск». В зависимости от ситуации, при которой контроллер был переведён в состояние «останов», это может быть холодный, теплый или горячий рестарт. В случае неуспешного запуска контроллер переходит в состояние «неисправность».
При успешном запуске, ПЛК переходит в состояние «выполнение», в котором может находиться сколь угодно долго. Из состояния «выполнение» контроллер может перейти в состояние «Останов» по команде оператора или программной инструкции, либо в состояние «неисправность» в случае возникновения исключительной ситуации. Из состояния «неисправность» по команде оператора через состояние «останов» контроллер может быть переведён в состояние «запуск».
Загрузка конфигурации ПЛК выполняется в состоянии «останов». Загрузка программы может производиться как в состоянии «останов», так и в состоянии «выполнение». Нужно отметить, что загрузка программы в состоянии «выполнение» поддерживается далеко не всеми контроллерами и обычно является очень удобным свойством ПЛК, например, при поэтапной разработке программы ПЛК, управляющего непрерывным технологическим процессом.
Для защиты данных программы на случай выключения питания ПЛК применяется буферная батарея, которая позволяет сохранять состояние рабочей памяти. Если в состав ПЛК входит буферная батарея, то в таком контроллере может быть реализован запуск в режиме теплого и горячего рестарта.
2.7. ПРИНЦИПЫ ФУНКЦИОНИРОВАНИЯ МОДУЛЕЙ ВВОДА-ВЫВОДА ПЛК
Модуль дискретного ввода
Принципиальная электрическая схема типового модуля дискретного ввода приведена на рис. 2.13. Дискретные датчики (Д0 … Д7) представляют собой ключи (электронные или механические – неважно). Замыкание соответствующего ключа замыкает электрическую цепь, подключая светодиод соответствующей опто-пары к источнику питания датчиков. Ток, протекающий через светодиод опто-пары, переводит транзистор оптопары в проводящее состояние и потенциал на его коллекторе становится равен нулю (относительно внутренней земли модуля), что соответствует логической единице в ТТЛ-логике. Если ток через светодиод не протекает (ключ разомкнут), то транзистор закрывается и на коллекторе устанавливается напряжение +5В (логический нуль). Текущие значения дискретных входов (логические нули и единицы) сохраняются в регистре данных (локальная память модуля), откуда в любой момент могут быть переданы по системной шине ПЛК по запросу модуля центрального процессора.
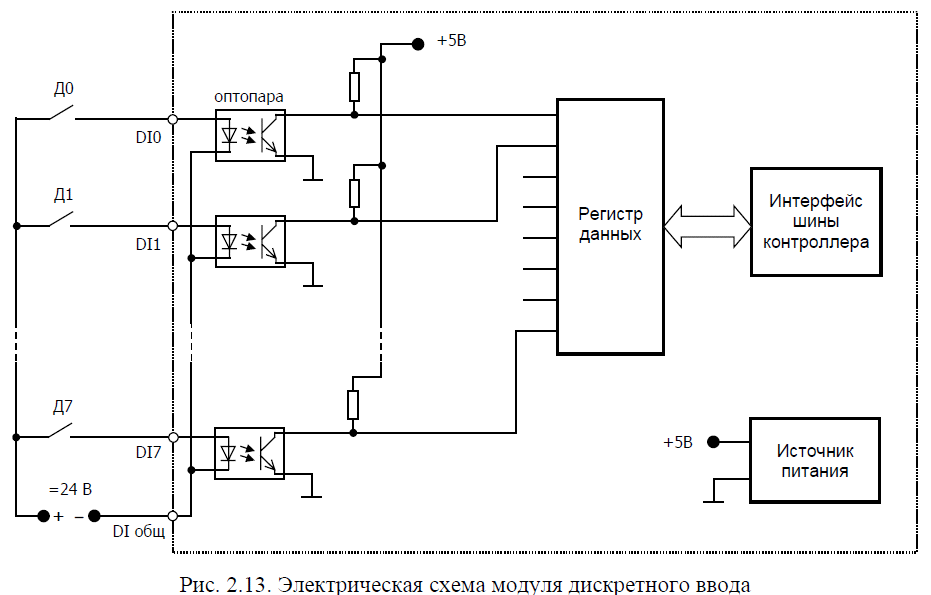
Возможен вариант, при котором питание датчиков осуществляется переменным напряжением, электрическая схема подключения датчиков к модулю дискретного ввода выглядит следующим образом (рис. 2.14). Два противоположно включенных параллельных светодиода оптопары обеспечивают открытие транзисторного ключа на каждом полупериоде сигнала.
В обеих схемах (рис. 2.13, 2.14) оптопары обеспечивают гальваническую развязку входов модуля с внутренними цепями.
К основным характеристикам модуля дискретного ввода относятся следующие:
• количество входов (каналов) и способ подключения сигнальных линий.
Количество каналов обычно кратно восьми. По способу подключения модули могут быть с дифференциальными входами (каждый вход − о








