Подробно рассматривается в [2] рекомендуемой литературы.
Общая часть.
Допплеровский измеритель скорости и угла сноса ДИСС-15 в комплекте с установленными на борту вертолета авиагоризонтом АГБ-ЗК и гиромагнитным компасом ГМК-1А предназначен для автоматического непрерывного измерения и индикации составляющих вектора скорости (в режиме висения вертолета), путевой скорости и угла сноса (в режиме крейсерского полета), счисления и индикации ортодромических координат местоположения вертолета. Аппаратура ДИСС-15 совместно с другими бортовыми приборами (автопилотом, радиовысотомером и др.) позволяет производить выведение вертолета в точку с заданными координатами, висение и посадку вертолета при отсутствии информации о направлении и силе ветра, висение и управление движением вертолета при отсутствии визуальной видимости.
Тактико-технические данные аппаратуры ДИСС-15
1. Вид излучения - непрерывные колебания.
2. Частота излучаемых колебаний —f° измен. от-30 до +20 MHz.
3 Мощность излучения — 2W.
Примечание. Номинальные значения частоты и мощности излучаемых колебаний даны в сводном паспорте на комплект аппаратуры ДИСС-15.
4.Рабочий диапазон высот:
а) в режиме навигации —10…3000 m
б) в режиме висения над сушей — 2...1000 m
в) в режиме висения над морем
(при волнении более 1 балла) — 2... 500 m
5. Диапазон измерения путевой скорости — 50...399km/h
6.Диапазон измерения угла сноса — ±45°.
7. Диапазон счисления ортодромических координат:
а) вдоль ортодромии — ± 999 km;
б) боковое уклонение от ортодромии —± 499km.
8. Диапазон измерения составляющих вектора скорости в режиме висения:
— продольный — от —25 до +50km\h
— поперечный—±25 km/h;
— вертикальный — ±10m/s.
9.Среднеквадратичные погрешности измерения параметров:
—путевой скорости —0,5%± l,5km/h;
—угла сноса — 25'
—ортодромических координат — l%±1km;
—продольной и поперечной составляющих вектора путевой скорости — ±1,5 km/h;
—вертикальной составляющей — ± 0,4 m/ s.
10. Потребляемые токи, не более:
—по бортсети постоянного тока +27V16A;
—по бортсети переменного тока 115 V 400 Hz 2 А;
—по бортсети переменного тока 36 V 400 Hz 1 А.
Комплект аппаратуры ДИСС-15.
| Наименование
| Шифр
| Кол-во
| Габаритные размеры,
| Масса, kg
|
|
|
|
| mm
|
|
| 1. Высокочастот-
| Блок ВЧ
| 1
| 640X324X275
| 29,50
|
| . ный блок
| ГР2.068.120
|
|
|
|
|
| СП
|
|
|
|
| 2. Низкочастотный
| Блок НЧ.
| 1
| 492X360X282
| 21,50
|
| блок
| ГР2.009.020.
|
|
|
|
|
| СП
|
|
|
|
| 3. Вычислитель ко-
| Блок 5. ГРЗ.
| 1
| 105X264X360
| 4,90
|
| ординат
| 038.0 18 сп
|
|
|
|
| 4. Индикатор ви-
| Блок 6. ГР2.
| 1
| 105x105x175
| 1,70
|
| сения и малых
| 524.001 сп
|
|
|
|
| скоростей
|
|
|
|
|
| 5. Индикатор пу-
| Блок 7. ГР2.
| 1
| 105x105x136,5
| 1,30
|
| тевой скорости
| 527.004 сп
|
|
|
|
| и угла сноса
|
|
|
|
|
| 6. Индикатор ко-
| Блок 8. ГР2.
| 1
| 125X125X178
| 3,00
|
| ординат
| 511.001 сп
|
|
|
|
| 7. Пульт контроля
| Прибор ПК.
| 1
| 140Х 68X15!
| 0,75
|
|
| ГР3.624.
|
|
|
|
|
| 029 сп
|
|
|
|
| Итого 52,65
|
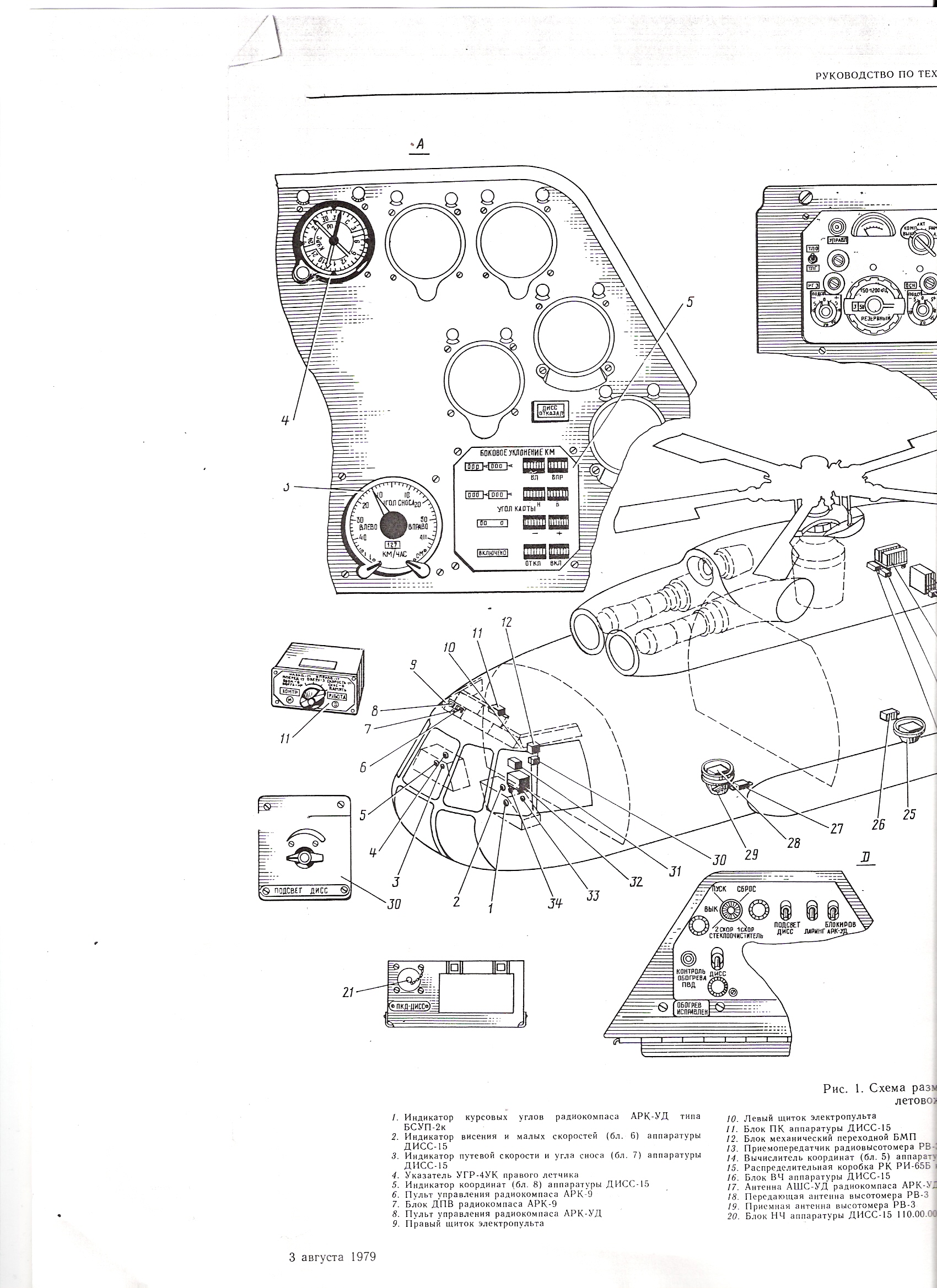
Размещение аппаратуры ДИСС-15 на вертолете.
—высокочастотный блок расположен в специальном обтекателе на откидной литой раме, закрепленной в нижней части хвостовой балки между шпангоутами № 2 и 5;
—низкочастотный блок расположен в радиоотсеке на левом борту, между шпангоутами № 14 и 15. Блок во время работы обдувается специальным внешним вентилятором обдува, расположенным там же;
—вычислитель координат (блок 5) расположен в радиоотсеке на левом борту между шпангоутами № 14 и 15
—индикатор висения и малых скоростей (блок 6) установлен на левой приборной доске летчиков
—индикатор путевой скорости и угла сноса (блок 7) установлен на правой приборной доске летчиков
—индикатор координат (блок 8) установлен на правой приборной доске летчиков
—пульт контроля (прибор ПК) установлен на правой этажерке в кабине экипажа
Коммутационная аппаратура ДИСС-15 размещена в распределительной коробке «РК РИ-65, ДИСС-15», установленной в радиоотсеке на левом борту сверху, между шпангоутами № 20 и 21. С аппаратурой ДИСС-15 сопряжены:
—авиагоризонт АГБ-ЗК;
—гиромагнитный компас ГМК-1А.
Для согласования входных сопротивлений узлов отработки низкочастотного блока с выходными сопротивлениями сельсин-датчиков АГБ-ЗК и ГМК-1А применены три переходных сельсин-трансформатора, расположенные в радиоотсеке на левом борту в районе шпангоутов № 14...15.
Описание
Высокочастотный блок состоит из приемопередатчика, антенного блока и волноводных элементов, жестко закрепленных на общем амортизационном основании. Основание имеет точно выполненные базовые поверхности для установки блоков, четыре отверстия «К» для фиксации электрической оси антенн и два отверстия «Н» для юстировки высокочастотного блока на вертолете. На верхней части основания размещается высокочастотный тракт, коммутатор СВЧ и приемопередатчик. К нижней части основания крепится приемная и передающая
антенны. Соединение высокочастотного блока с низкочастотным блоком осуществляется посредством кабеля.
Низкочастотный блок состоит из вычислителя составляющих скорости и блока питания, установленных на соединительной коробке (прибор CK-A1), которая служит одновременно связывающим конструктивным звеном и амортизационной рамой. Электрическое соединение низкочастотного блока с другими блоками осуществляется посредством кабелей через прямоугольные комбинированные разъемы в соединительной коробке. Кроме того, соединительная коробка СК-А1 выполняет функции общего коммутационного устройства аппаратуры, обеспечивающего межблочные связи и связи с сопрягаемыми бортовыми устройствами.
Вычислитель координат представляет собой электронный блок, установленный на амортизационной раме.
Индикатор висения и малых скоростей представляет собой пилотажный электромеханический прибор. Лицевая панель прибора состоит из четырехугольного крепежного фланца, внутри которого расположена круглая шкала. На шкале имеются:
—перекрестие для индикации горизонтальных составляющих вектора скорости (по вертикальной щели ведется отсчет составляющей ВПЕРЕД — НАЗАД, по горизонтальной - ВЛЕВО — ВПРАВО;
—дугообразная шкала в левой части для индикации вертикальной составляющей скорости;
—световое табло ВЫКЛ.
Отсчет скоростей ВПЕРЕД—НАЗАД и ВЛЕВО—ВПРАВО производится по острию столбиков указателей, перемещающихся в щелях перекрестия. Цена деления обеих шкал 5 km/h; Пределы измерения:
—по шкале ВПЕРЕД — 50 km/h;
—по шкалам НАЗАД—ВЛЕВО, ВПРАВО- 25 km/h.
Отсчет скорости ВВЕРХ—ВНИЗ производится по подвижной стрелке. Цена деления 1 m/h.
Индикатор путевой скорости и угла сноса представляет собой навигационно-пилотажный электромеханический прибор. Лицевая панель прибора выполнена в виде четырехугольного крепежного фланца, внутри которого расположена круглая шкала, имеющая подвижную стрелку угла сноса, табло трехразрядного декадного счетчика путевой скорости и табло П (память). В нижней части блока симметрично вертикальной оси шкалы расположены две ручки управления. Левая ручка предназначена для переключения вычислительного тракта из рабочего режима (Р) в контрольный режим (К) и наоборот, правая ручка — для переключения режима работы аппаратуры над сушей (индекс С) и морем (индекс М). Считывание величины и знака угла сноса производится по положению подвижной стрелки относительно рисок круговой шкалы. Цена деления шкалы 2°, пределы измерения по шкале угла сноса ±45°. 400
Считывание величины путевой скорости производится по показаниям декадного счетчика. Цена первого разряда (крайний справа)— 1 km/h, цена деления второго разряда 10 km/h и третьего разряда — 100 km\h Пределы измерения путевой скорости 50... 400km/h (от 0 до 50 km/h счетчик работает, табло закрыто шторкой).
Индикатор координат представляет собой навигационный электромеханический прибор. Лицевая панель прибора выполнена в виде четырехугольного крепежного фланца, внутри которого, слева, расположены три индикаторных табло и световое табло ВКЛ, справа — органы управления индикатором. Считывание величины бокового уклонения осуществляется по показаниям верхнего трехразрядного декадного счетчика. Цена единицы первого разряда (справа) — 1 km, второго— 10 km, третьего — 100 km. Определение направления уклонения производится по табло ВЛЕВО—ВПРАВО. Пределы измерения бокового отклонения составляют 0...499 km в каждую сторону.
Считывание величины пройденного пути осуществляется по показаниям аналогичного декадного счетчика;
Определение направления движения производится по табло ВПЕРЕД—НАЗАД. Пределы измерения пройденного пути составляют 999 km в каждую сторону.
Ниже счетчика пути расположено индикаторное табло угла карты, которое разделено на левую трехразрядную часть, где устанавливаются градусы, и правую, где выставляются минуты вводимого значения угла карты. Органы управления индикатора выполнены в виде четырех групп клавишных выключателей. Каждая группа, состоящая из двух клавиш, располагается на одной линии справа с соответствующими индикаторными табло.
Бортовой пульт контроля представляет собой малогабаритное электронное устройство для контроля параметров аппаратуры. На лицевой панели пульта размещены световые табло, надписи и ручка переключения режимов. Слева от ручки переключения режимов размещено световое табло КОНТР, справа — световое табло РАБОТА. Внизу, слева, установлено световое табло М. (отказ магнетрона), справа табло В (отказ вычислителя). Переключатель режимов может устанавливаться в любое из пяти различных положений. Крайнее правое положение соответствует режиму РАБОТА, четыре других положения — различным проверочным задачам контрольного режима. Световое табло ДИСС ОТКАЗАЛ на правой приборной доске фиксирует отказ аппаратуры одновременно с табло М или В на пульте контроля и переход в режим ПАМЯТЬ, т. е. загорается одновременно с табло П (память) на блоке 7.
С вертолета выпуска 1978 г. табло ДИСС ОТКАЗАЛ при переходе в режим ПАМЯТЬ загорается с задержкой 2,5 s.
Индикатор путевой скорости и угла сноса Индикатор координат
Бортовой пульт контроля

Индикатор висения и малых скоростей
Работа аппаратуры ДИСС-15 основана на использовании эффекта Допплера-Белопольского, сущность которого заключается в том, что при взаимном относительном перемещении источника и приемника электромагнитных колебаний частота принимаемых колебаний отличается от частоты излучаемых на величину Fд, называемой допплеровской частотой. Для измерения путевой скорости на вертолете установлены передатчик (источник электромагнитных колебаний) и приемник, который принимает отраженные от земли сигналы, несущие информацию о частоте Допплера.
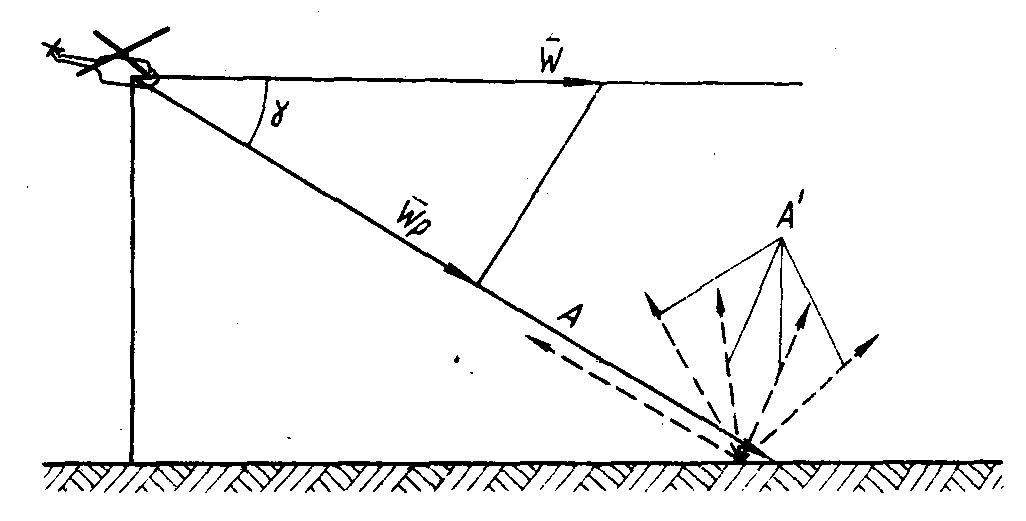
Рис. 1. Принцип измерения путевой скорости:
А. Излученная энергия СВЧ
А'. Отраженная энергия СВЧ
Путевая скорость W и частота Допплера связаны следующей зависимостью (рис. 1).

или, учитывая, что излучение под углом, то
Или
где F д — частота Допплера;
f A — частота излучаемых колебаний;
с — скорость распространения электромагнитных волн;
W — путевая скорость летательного аппарата;
 — угол наклона луча к земле;
— угол наклона луча к земле;
Wp — проекция вектора W на направление излучения;
 — длина волны излучаемых колебаний.
— длина волны излучаемых колебаний.
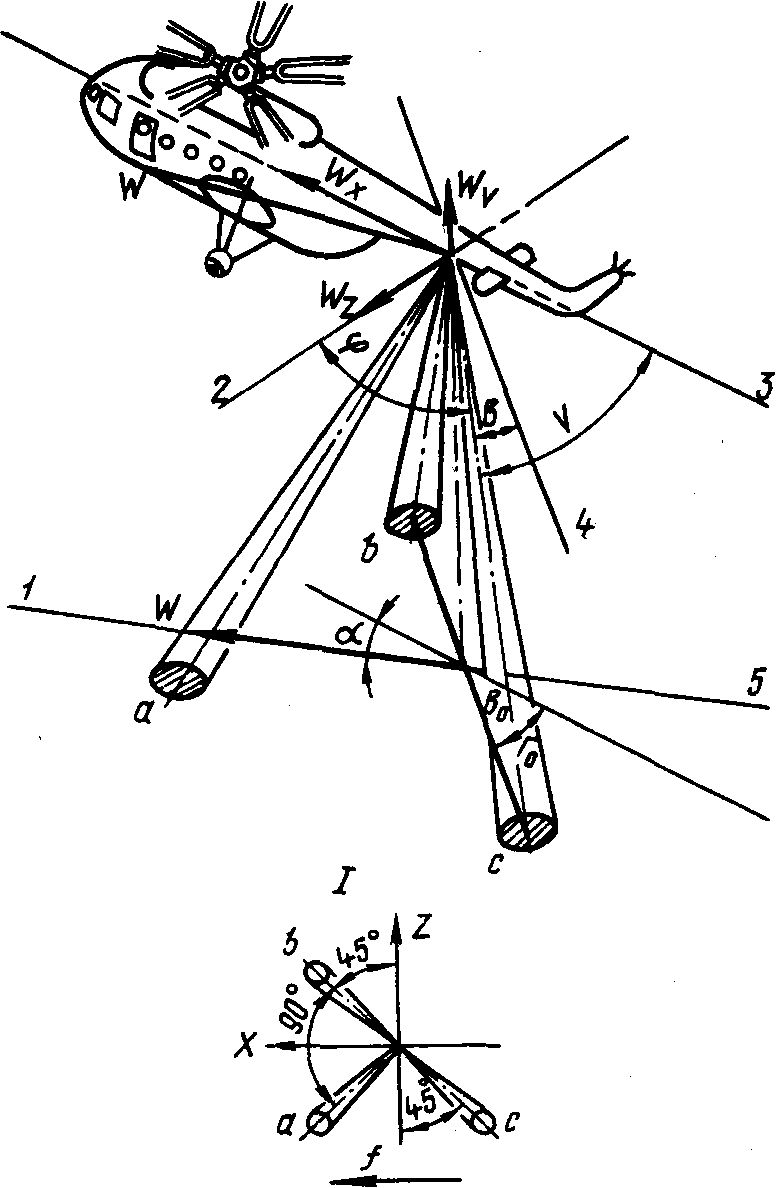 В аппаратуре ДИСС-15 используется антенная система с трехлучевой диаграммой направленности (рис. 2), что необходимо для измерения угла сноса а и вычисления составляющих вектора скорости вертолета.
В аппаратуре ДИСС-15 используется антенная система с трехлучевой диаграммой направленности (рис. 2), что необходимо для измерения угла сноса а и вычисления составляющих вектора скорости вертолета.
Рис. 2. Схема расположения лучей допплеровского измерителя:
a. Луч I
b. Луч 2
c. Луч 3
1. Линия пути
2. Линия, параллельная поперечной оси вертолета
3. Линия, параллельная продольной оси вертолета
4. Проекция направления луча 3 на плоскость, параллельную продольной и поперечной осям вертолета
5. Проекция продольной оси вертолета
I. Проекция лучей антенной системы на плоскость, параллельную продольной и поперечной осям вертолета
f. Направление полета.
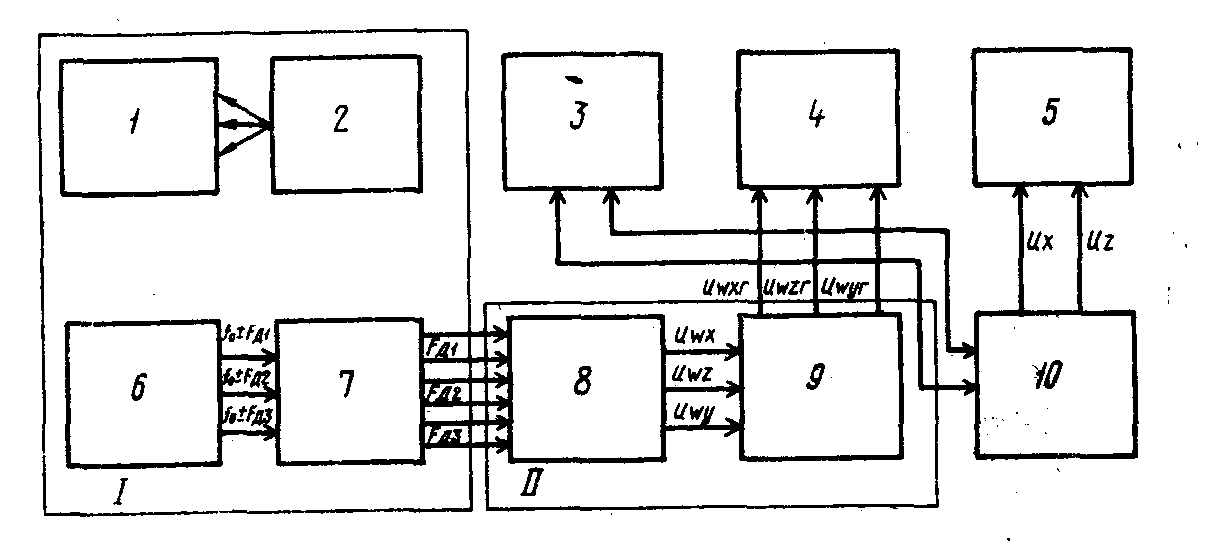
Рис. 3. Блок-схема измерителя ДИСС-15:
/. Передающая антенна
2.Передатчик
3 Индикатор путевой скорости и угла сноса {w, a)
4 Индикатор висения и малых скоростей (Wxn Wz, W f)
5. Индикатор координат (х, z) и ЗУК,
6. Приемная антенна
7. Устройство выделения допплеровских частот
8 Вычислитель составляющих скоростей в системе координат вертолета
9. Устройство преобразования координ-ат
10. Вычислитель координат
/. Высокочастотный блок
//. Низкочастотный блок
Блок-схема аппаратуры ДИСС-15 приведена рис. 3.
Работа аппаратуры происходит следующим образом. Энергия СВЧ, генерируемая передатчиком, направляется в передающую антенну и излучается в сторону земной поверхности. Отраженные от земной поверхности сигналы поступают на приемную антенну, откуда они даются на устройство выделения допплеровских частот и разделение их по знаку. По величинам и знакам допплеровских частот принимаемых раздельно по трем лучам антенны, в аппаратуре решается задача вычисления составляющих вектора скорости вертеле. Сначала решается задача вычисления в системе. координат, связанной с вертолетом (ось X и параллельна продольной строительной оси,
Z параллельна поперечной оси, ось Y перпендикулярна осям X и Z)
Решение производится вычислителем составляющих вектора скорости в системе координат, связанной с вертолетом, путем преобразования допплеровских сигналов F д в постоянные напряжения, связанных с частотами этих сигналов следующими соотношениями:
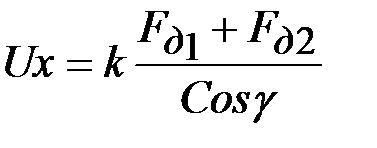
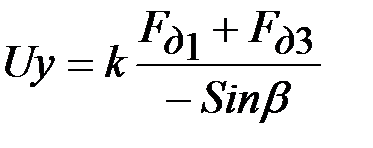

где k — коэффициент пропорциональности
 — углы визирования лучей антенны
— углы визирования лучей антенны
 — угол между вектором скорости и проекцией на горизонтальную плоскость.
— угол между вектором скорости и проекцией на горизонтальную плоскость.
Затем решается задача получения составляющих вектора скорости в горизонтальной ной системе координат по напряжениям, пропорциональным составляющим вектора скорости в связанной с вертолетом системе координат и напряжениям, пропорциональным крену, тангажу вертолета, поступающим из авиагоризонта АГБ-ЗК.
Вычисленные составляющие вектора скоро в земной системе координат Wxr, Wzr и Wyr выдаются в виде постоянных напряжений. По напряжениям, пропорциональным продольной и поперечной составляющих вектора скорости в горизонтальной (земной) системе координат, в вычислителе составляющих вектора скорости совместно с блоком 7 решаются пучения напряжений:
-пропорционального углу сноса, по формуле:

-пропорционального путевой скорости, по формуле:

Где  угол сноса.
угол сноса.
Вычисленные параметры движения вертолета срабатываются следящими системами индикаторных блоковоков и индицируются на указателях Wxr, Wzr и Wyr, a, и счетчика W. По напряжению, пропорциональному продольной и поперечной составляющим вектора скорости, и напряжению, пропорциональному разности между курсовым углом и углом карты, вырабатываются импульсы, управляющие приводом счетчиков отработки пройденного пути бокового уклонения индикатора координат (Блок 8).
Частота следования этих импульсов пропорциональна скорости вертолета вдоль ортодромии (канал обработки пройденного пути) и скорости вертолета, перпендикулярный к ортодромии (канал обработки бокового уклонения). Координаты в ортодромической системе координат X и Z индицируются на шкалах индикатора координат.
Связь аппаратуры ДИСС-15 с бортовыми устройствами навигации.
Для обеспечения вычисления составляющих вектора скорости в земной системе координат аппаратура ДИСС-15 сопрягается с датчиками крена и тангажа авиаризонта АГК- 3К. При этом через переходные сельсин-трансформаторы ПСТ (крен) (21/29), и ПСТ (тангаж) (23/ 29) с синусно-косинусных трансформаторов датчиков крена и тангажа авиагоризонта АГБ-ЗК на синусно-косинусные трансформаторы-приемники СКТ узла У5 и CKT узла У-2 блока НЧ подаются напряжения, пропорциональные текущим значениям углов крена, тангажа вертолета. Для обеспечения вычисления координат положения вертолета аппаратура ДИСС-15 сопрягается с датчиком гиромагнитного компаса
ГМК-1А. При этом через переходный сельсин-трансформатор ПСТ (курс) (22/29) с синусно-косинусного трансформатора датчика ГМК -1Ана синусно-косинусный трансформатор приемника СКТ узла 
 подается напряжение, пропорциональное текущему значению угла магнитного курса
подается напряжение, пропорциональное текущему значению угла магнитного курса  вертолета.
вертолета.
Doppler navigation.
Aircraft operating over the oceans and in other areas where there are no or few ground-based navigation systems and limited ATC, eg Africa, have to depend on standalone systems and dead-reckoning methods for navigation. However, this can lead to large errors over long flights as the majority of these systems are not ground related, and landmarks that can provide an update can be missed or not visible because of inclement weather and/or darkness. To overcome these shortfalls, Doppler Radar was developed, initially by the military as an autonomous navigation system that could provide a continuous output of the aircraft's position.
The Doppler Principle
The Doppler Principle or Doppler Effect is defined in physics as the apparent variation in frequency of any radiated wave such as light waves or sound waves, as the source of the wave approaches or moves away from an observer. The effect is named after the Austrian physicist Christian Johann Doppler (1803 to 1853). Doppler's principle explains that, if a source of sound of a constant pitch is moving towards a person^ the sound appears higher, whereas if the source is moving away it seems lower. This change in pitch can best be demonstrated by what happens as a person listens to the sound of a fast non stopping train as it approaches a station platform. As it approaches the listener the sound is different from than when it is moving away from the listener. The two sounds appear different but the train is creating the same sound all the time.
Equating this for aircraft systems, the Doppler radar transmits a Continuous Wave (CW) of electromagnetic energy as it is moving towards a target, ie in this case the ground. The reflected signal now originates from a point nearer to the aircraft than at the point of transmission, as it is moving forward, and therefore returns in a shorter time. Consequently more cycles of the returned CW reach the aircraft in any second than if it were standing still; this causes the perceived rise in frequency of the returned signal, ie it causes a Doppler shift. If the aircraft were going in reverse, obviously only possible in a helicopter, the perceived frequency shift would be downwards.
The frequency differences are small, typically 50 Hz per knot of closure speed at 10 GHz, so the transmitted frequency must be kept stable.
When a signal is transmitted from an aircraft, this effect results in a difference between the transmitted and received signal as the aircraft moves. Doppler navigation measures this frequency difference, and if the transmission wavelength is known and kept constant any detected Doppler shift is directly proportional to the aircraft's speed. This is an oversimplification for accurate navigation purposes, but does introduce the Doppler principle.
How Does Doppler Work?
Aircraft Doppler systems are really, in effect, velocity sensors, and work by transmitting a signal as a narrow beam of radio waves so that the radiation will hit the ground a short distance ahead of the aircraft's flight-path. On reaching the ground, the signal's energy will be scattered by the irregularities of the Earth's surface, but some will be returned back in the direction of the aircraft. These are picked up by the Doppler receiver. On the path between aircraft and ground, the signal hitting the ground is higher than that radiated. The reflected signal, received by an approaching aircraft will also result in yet a further frequency increase. The Doppler receiver measures the frequency shift of the reflected signal and from this the aircraft's relative velocity is calculated. However, to accurately measure the aircraft's true velocity, the transmitted beam's angle of depression (<|>), must be allowed for in the calculation, figure 34.
| 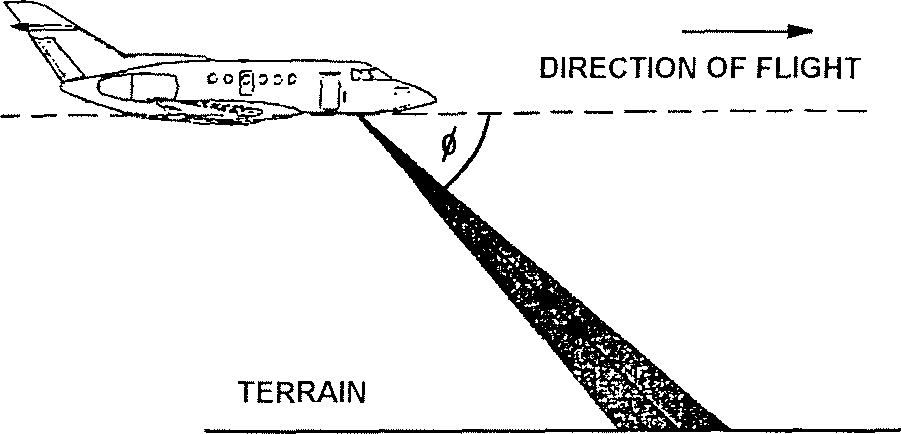
Fig. 34 DOPPLER BEAM ANGLE
|
This is necessary as the Doppler system uses the aircraft's velocity in its navigation computation and so it is essential that the beam angle (<|>), is accurately known, as otherwise cumulative errors would build up in the integrated values of computed distance.
However, with a single beam system, to maintain system accuracy, the aircraft would have to be flown 'straight? and 'level' at all times. Obviously, this is not always possible and so the installation design must be altered to compensate for any attitude changes.
One method would be to mount the system's antenna on a gyroscopically stabilised platform so that it can maintain a constant beam angle relative to the vertical, irrespective of the aircraft's attitude. Indeed, this is how some installations overcome the problem, but this method is expensive and is not easy to implement in fast jet aircraft, as the moving antenna would have to be encased in an aerodynamic housing to prevent drag as it alters its angle.
A more economic alternative is to transmit a second beam to the rear of the aircraft at the same angle (<()), as the forward beam figure 35. By comparing the frequency shifts of the fore and aft beams, any errors due to pitch angle can be eliminated.

This technique, of using two opposing beams is called the 'Janus' configuration, named after the Roman god of doorways, who was able to face in both directions at the same time.
Using two beams pointing fore and aft takes care of pitch attitude changes, but in this case, the assumption is that the aircraft's heading and track are coincident. However, this rarely occurs due to cross winds, and is also not true if the aircraft banks, as in a turn. Under these circumstances, the velocity measurement derived from a single forward facing beam, or of fore and aft beams, would be in error by a factor proportional to the aircraft's drift angle. To overcome this, a third beam is introduced to provide further velocity measurement in the lateral plane.
The three beams are often arranged in the shape of the Greek letter lambdaf A), two beams being radiated forward symmetrically about the centre line of the aircraft and the third pointing aft, 180° from one of the forward beams. Alternatively four beams can be installed in an 'X' configuration. Although this fourth beam is not strictly necessary, it does give the advantage of redundancy, and permits automatic monitoring. Figure 36 shows various beam configurations, Janus and non-Janus, that are employed on aircraft.
The velocity measurement from each of these beams is fed to the system's computer. It compensates for the relative bearing of each of the beams relative to the axes of the aircraft, and compares its inputs with a heading reference, eg from a compass, IRS, etc. It then mathematically calculates the velocity vectors of the aircraft's track, drift and height variation. The velocity vector is resolved into the three basic components, ie horizontal, lateral and vertical.

The results can be further integrated, with respect to time, to determine the displacement from the aircraft's original point of departure. Therefore, if the flight crew ensure that the point of departure is accurately referenced before take-off, the current position of the aircraft may be displayed in latitude and longitude. More complex computers can act like a Flight Management System (FMS), and have the facilities for inserting waypoints and flight-plans. In addition, they can also display distance and bearing to the next waypoint and provide updated referencing using other ground-based navigational aids, eg DME/DME. This sophisticated system can also calculate and provide outputs of:
* Speed and distance
* True altitude
* Angle of Attack (AoA)
Wind Velocity
Frequency and Signal Characteristics
The sensitivity of a Doppler radar, measured as Hz per knot, increases with frequency, and in addition, the higher the frequency, the narrower the beam- width for a given aerial size. Increasing a system's sensitivity is obviously a good thing, but if the frequency is increased excessively, absorption, back scattering effects and rain reflections can become a problem. The selected frequency is therefore, as with all things, a compromise. As a result, Doppler systems operate either in the X-Band frequencies, from 8.8-9.8 GHz or the K- Band from 13.25 - 13.40 GHz.
With these frequencies, typical Doppler systems operating overland have errors of the order of less than 0.25% in ground speed and drift angle, but its overall navigational accuracy has to depend on the quality of other inputs, eg heading information.
Aircraft Equipment
Doppler systems come in all shapes and sizes with varying degrees of sophistication. It would be impossible to cover all of these here, so we will look at a typical system. Most aircraft only have a single Doppler navigation system as they are expensive to install and maintain. A typical system has the following components;
* Doppler Sensor
* Doppler Controller
* Indicator
* Automatic Chart Display (ACD)
Doppler Sensor
With the majority of systems, the transmitter/receiver, processing circuits and antennas are contained in one LRU called a Doppler Sensor. The transmitter section is usually a solid-state device that transmits CW at a power level typically about 0.5-1 Watt.
The receiver section is time-shared between the various antennas and contains all the necessary circuitry to measure the Doppler shift and process the information into useable data. In a multi-beam system, the receiver incorporates monitoring circuits to check on the integrity of each antenna.
The antennas are mounted on the underside of the Doppler sensor and incorporate microwave switches for the receiver to time-share between the various beams. The depression angle of the beams will vary with the system manufacturer, but as an example, the Decca Navigator 80 system uses a depression angle of 67°, with beam-widths of 5.5° - 11°, depending on the antenna position.
Doppler Controller
The type of Doppler controller used in an installation will vary with its sophistication. On large transport aircraft, Doppler control is achieved through the FMS Control and Display Unit (CDUj, while standalone systems need their own controller. In its simplest form, the controller need only provide a method of switching on the system and provide a means of entering the aircraft's starting position. With systems that are capable of defining waypoints and flight-plans, a full CDU similar to those used for FMS must be used and these will usually have access to a Jeppesen or other navigation database.
Indicators
Doppler systems can be integrated into the aircraft's existing displays, eg HSI, ADIs, etc by using standard ARINC or digital databus outputs. In addition, some manufacturers produce dedicated Doppler indicators like the Decca Position Bearing and Distance Indicator (PBDI), This indicator accepts inputs from the Doppler sensor and a heading source, eg a magnetic compass. It combines this information and calculates the aircraft's position in latitude and longitude or grid coordinates. In addition, it can also display bearing and distance to the next waypoint and information on up to 10 waypoints that are maintained in a non-volatile memory. This display can also be switched to indicate the aircraft's ground-speed and drift angle.
Automatic Chart Display (ACD)
Some systems incorporate an Automatic Chart Display that is in addition or replaces the normal indicator. These ACDs are usually detachable and connected to the system via a flexible cable, which allows it to be used on an operator's lap or in any other convenient position.
The aircraft's position is indicated by a pair of cross-wires moving over a conventional navigation chart. Early ACDs are limited by the size of the chart that can be fitted in the display, but later systems used digitised maps and have unlimited range. However, these types of display are expensive and are usually only used in military applications or in highly specialised areas such as surveying work.
System Accuracy
System accuracy will depend on the sophistication of the installation. It would be impossible to cover all systems here, but the following table compares the the relatively simple Canadian Marconi CMA-2012 and Litton An/APN-218 systems:
From this short comparison table, you should be able to deduce that the CMA- 2012 system is used for small aircraft and helicopters, while the AN/APN-218 system is installed on sophisticated military aircraft; a significant difference in specification and obviously cost.
Вопросы для самоконтроля.
1. В чем особенности определения места ЛА доплеровскими навигационными системами?
2. Что входит в состав доплеровских систем навигации.
3. Какие принципы положены в основу функционирования ДИСС?
4. Как устроены трехлучевая и четырехлучевая антенные системы ДИСС? Запишите алгоритмы расчета навигационных параметров для этих случаев.
5. Почему необходимо использовать в антенных системах ДИСС не менее трех лучей?
6. Приведите и опишите обобщенную структурную схему ДИСС и режимы его работы.
7. Какие ДИСС по виду излучаемого сигнала и способу выделения доплеровского спектра вы можете перечислить?
8. Дайте характеристику доплеровскому измерителю ДИСС-013.
9. Приведите структурную схему и опишите назначение, выполняемые функции, состав оборудования бортового навигационного комплекса самолета Ил-62.
10. Охарактеризуйте особенности построения и функционирования вертолетного доплеровского измерителя ДИСС-15.
Рекомендуемая литература.
Основная
1. Сосновский А.А., Хаймович И.А. Радиоэлектронное оборудование летательных аппаратов. Справочник – М.: Транспорт, 1987г.
2. Учебное пособие. Радиоэлектронное оборудование ЛА. Составитель Кукушин В.А. Академия ГА, 2007г.
3. Учебное пособие. COMMUNICATION СВЯЗНОЕ ОБОРУДОВАНИЕ BOEING 737-600/700/800/900. Training Manual. Составитель Кукушин В.А. Академия ГА, 2008г.
4. Учебное пособие. NAVIGATION. Part 1. НАВИГАЦИОННОЕ ОБОРУДОВАНИЕ. Часть 1. BOEING 737-600/700/800/900. Training Manual. Составитель Кукушин В.А. Академия ГА, 2008г.
5. Учебное пособие. COMMUNICATIONS СВЯЗНОЕ ОБОРУДОВАНИЕ
А-320. Training Manual. Составитель Кукушин В.А.
Дополнительная
1. Aircraft Aerodynamic, Structures and Systems. Module 13: M13.04 Communication Navigation (ATA 23/34); M13.06 Equipment and Furnishings (ATA 25) / EASA Part-66 Training Handbook. – LINK&LEARN Aviation Training GmbH, 2007. – 176 p.
2. Эксплуатационная документация на аппаратуру. (Технические описания. Инструкции по эксплуатации. АММ).







