Когда в механике говорят о движении тела, то подразумевают под этим изменение с течением времени его положения в пространстве по отношению к другим телам.
Обычно с телом, по отношению к которому изучают движение, связывают какую-нибудь систему координат, которую вместе с выбранным способом измерения времени называют системой отсчета. Если координаты всех точек тела в выбранной системе отсчета остаются неизменными во времени, то тело находится в покое.
Если рассматривается движение тела по отношению к условно неподвижной системе отсчета, то движение называют абсолютным; движение тела по отношению к подвижной системе отсчета называют относительным.
В мире все находится в непрерывном движении, поэтому все движения являются относительными, однако условно можно представить себе и абсолютное движение, например, движение по отношению к Земле.
Итак, движение тело совершается в пространстве с течением времени. Пространство и время, как и движение, согласно учению диалектического материализма – формы существования материи.
Классическая механика полагает, что пространство и время имеют абсолютный, независимый друг от друга характер, и что их свойства не зависят от распределения и движения материи.
Такая точка мировоззрения господствовала в науке до начала XX века, пока гениальный А. Эйнштейн (1879-1955) не поставил ее под сомнение своей теорией относительности. Этот человек сломал вековое представление человечества о самом главном – об абсолютности времени и пространства. Теория относительности Эйнштейна – это современная физическая теория пространства и времени, связывающая эти доселе незыблемые независимые постулаты с движением, массой и энергией.
До А. Эйнштейна считалось, что все в мире относительно. Если тело движется по отношению к какой-либо подвижной системе, то оно имеет другой характер движения по отношению к той системе, относительно которой движется данная система. Это утверждение являлось одним из китов, на которых восседала наука до начала прошлого века.
Теория относительности Эйнштейна основывается на том, что скорость света является постоянной величиной, не зависящей от скорости источника этого света. На основании этого противоречащего здравому смыслу вывода можно утверждать, что и пространство, и время – суть понятия относительные, зависящие от скорости света.
Гениальность Эйнштейна заключается в том, что он увидел и объял неочевидное. Современная физика, на основании множества экспериментов, опытов и исследований полностью подтвердила его теорию.
Тем не менее, несмотря на открытия Эйнштейна, классическая механика не потеряла свою актуальность, так как при скоростях движения, далеких от скорости света, результаты, даваемые классической механикой, ничтожно мало отличаются от результатов механики теории относительности и вполне пригодны для практики. Можно сказать, что классическая механика является частным случаем механики теории относительности, предполагающая упрощенные расчеты с допустимыми погрешностями.
***
Основные определения кинематики
Чтобы понять смысл определений кинематики следует ознакомиться с понятиями и определениями другого раздела технической механики – теорией механизмов и машин, которая занимается приложением законов теоретической механики для практических расчетов деталей, механизмов и машин.
Механизмом называется совокупность связанных между собой тел, имеющих определенные движения и служащих для передачи и преобразования движения.
Машиной называют механизм или сочетание механизмов, служащих для преобразования энергии (энергетические машины), изменения формы, свойств, состояния и положения предмета труда (рабочие машины), или для сбора, переработки и использования информации (информационные машины).
Таким образом, любая машина состоит из одного или нескольких механизмов, но не всякий механизм является машиной, т. е. машина – понятие более широкое.
Простейшей частью любой машины является ее звено – одно тело или неизменяемое во время работы машины сочетание группы тел.
Два звена, соединенные между собой и допускающие относительное движение, называются кинематической парой.
Кинематические пары бывают низшие и высшие. Звенья низших пар соприкасаются по поверхностям (поступательные, вращательные и винтовые пары), звенья высших пар соприкасаются по линиям и точкам (зубчатые пары, подшипники качения и т. п.).
Совокупность кинематических пар называется кинематической цепью.
Кинематические пары и цепи могут быть плоскими и пространственными. Механизм – это кинематическая цепь, у которой одно из звеньев лишено движения (закреплено). Такое звено называют станиной или стойкой.
Звено, вращающееся вокруг неподвижной оси, называют кривошипом, качающееся вокруг неподвижной оси – балансиром или коромыслом.
Звено, совершающее сложное движение параллельно какой-то плоскости, называют шатуном. Звено, совершающее возвратно-поступательное движение по станине или стойке, называют ползуном.
Ведущим звеном механизма считается то, которому извне сообщается определенное движение, передаваемое посредством этого звена другим звеньям, называемым ведомыми.
Кинематика изучает закономерности относительного движения и перемещения отдельных звеньев механизмов, без учета сил, вызывающих эти движения и перемещения.
Основными физическими величинами, которыми оперирует кинематика, являются расстояние (длина) и время. Единицей измерения длины в системе СИ является метр (м), единицей измерения времени – секунда (с).
Способы задания движения точки
Знание законов движения тела означает знание законов движения каждой его точки, поэтому изучение кинематики основывается на изучении геометрии движения точки.
Траекторией точки называется множество (геометрическое место) положений движущейся точки в рассматриваемой системе отсчета. Проще говоря, траектория движения – это линия, которую описывает подвижная точка относительно выбранной системы отсчета. В зависимости от формы траектории различают прямолинейное и криволинейное движение.
Движение любой точки тела можно описать (задать) тремя способами – естественным, векторным и координатным (см. рисунок 1).
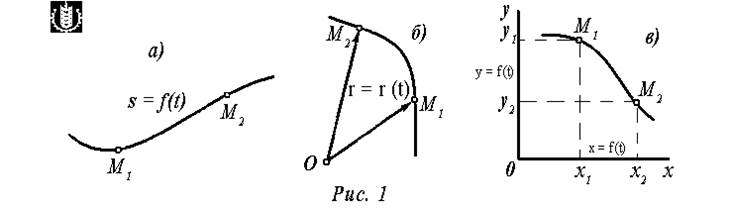
Естественный способ (рис. 1а) заключается в том, что движение точки задается ее траекторией, началом отсчета и уравнением движения по этой траектории (законом движения).
В общем виде уравнение движения записывается так: s = f(t), где s – расстояние от точки до начального положения (начала отсчета), являющееся функцией времени; t – время движения точки от начального отсчета.
Зная траекторию и закономерность (уравнение) движения точки по этой траектории, можно в любой момент времени определить, где она находится.
При своем движении точка проходит некоторый путь, который также является функцией времени. Следует отметить, что путь, пройденный точкой, совпадает с расстоянием от начала отсчета лишь в том случае, если траектория движения точки представляет собой прямую линию, и точка движется по ней в одном направлении, а начало движения точки совпадает с началом отсчета.
Векторный способ (рис. 1б) основывается на том, что положение точки в пространстве однозначно определяется радиусом-вектором r, проведенным из некоторого неподвижного центра к данной точке. При этом положение точки в данный момент времени определяется направлением и модулем вектора. Математически функция изменения радиуса-вектора от времени записывается так:
r = rf(t)
Координатный способ (рис. 1в) заключается в том, что движение точки задается движением ее проекций вдоль осей координат. В общем виде уравнение движения точки можно записать следующим образом:
x = f(t), y = f1(t), z = f2(t).
Зная уравнения движения точки в координатной форме, можно, подставив в эти уравнения время, определить положение проекций точки, а следовательно, и самой точки в любой момент времени.
Если точка движется в плоскости, то для определения ее местоположения в данный момент времени достаточно знать две координаты, если движение происходит по прямой – достаточно одной координаты.
Скорость точки
В предыдущей статье движение тела или точки определено, как изменение положения в пространстве с течением времени. Для того чтобы более полно охарактеризовать качественные и количественные стороны движения введены понятия скорости и ускорения.
Скорость – это кинематическая мера движения точки, характеризующая быстроту изменения ее положения в пространстве.
Скорость является векторной величиной, т. е. она характеризуется не только модулем (скалярной составляющей), но и направлением в пространстве.
Как известно из физики, при равномерном движении скорость может быть определена длиной пути, пройденного за единицу времени: v = s/t = const (предполагается, что начало отсчета пути и времени совпадают).
При прямолинейном движении скорость постоянна и по модулю, и по направлению, а ее вектор совпадает с траекторией.
Единица скорости в системе СИ определяется соотношением длина/время, т. е. м/с.
Очевидно, что при криволинейном движении скорость точки будет меняться по направлению.
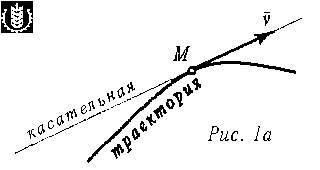
Для того, чтобы установить направление вектора скорости в каждый момент времени при криволинейном движении, разобьем траекторию на бесконечно малые участки пути, которые можно считать (вследствие их малости) прямолинейными. Тогда на каждом участке условная скорость vп такого прямолинейного движения будет направлена по хорде, а хорда, в свою очередь, при бесконечном уменьшении длины дуги (Δs стремится к нулю), будет совпадать с касательной к этой дуге.
Из этого следует, что при криволинейном движении вектор скорости в каждый момент времени совпадает с касательной к траектории (рис. 1а). Прямолинейное движение можно представить, как частный случай криволинейного движения по дуге, радиус которой стремится к бесконечности (траектория совпадает с касательной).
При неравномерном движении точки модуль ее скорости с течением времени меняется.
Представим себе точку, движение которой задано естественным способом уравнением s = f(t).
Если за небольшой промежуток времени Δt точка прошла путь Δs, то ее средняя скорость равна:
vср = Δs/Δt.
Средняя скорость не дает представления об истинной скорости в каждый данный момент времени (истинную скорость иначе называют мгновенной). Очевидно, что чем меньше промежуток времени, за который определяется средняя скорость, тем ближе ее значение будет к мгновенной скорости.
Истинная (мгновенная) скорость есть предел, к которому стремится средняя скорость при Δt, стремящемся к нулю:
v = lim vср при t→0 или v = lim (Δs/Δt) = ds/dt.
Таким образом, числовое значение истинной скорости равно v = ds/dt.
Истинная (мгновенная) скорость при любом движении точки равна первой производной координаты (т. е. расстояния от начала отсчета перемещения) по времени.
При Δt стремящемся к нулю, Δs тоже стремится к нулю, и, как мы уже выяснили, вектор скорости будет направлен по касательной (т. е. совпадает с вектором истинной скорости v). Из этого следует, что предел вектора условной скорости vп, равный пределу отношения вектора перемещения точки к бесконечно малому промежутку времени, равен вектору истинной скорости точки.






