Продукт проектно-исследовательской работы
Инструкция по сборке гоночного квадрокоптера
Выполнил:
Ученик 9Б класса
МБОУ Школы №162 г.о. Самара
Андреев Дмитрий
Основные узлы и компоненты квадрокоптера
Чтобы понимать устройство квадрокоптера, нужно разобраться с его основными составными частями и тем, как они связаны между собой и совместно работают. Их немного:
· Рама (frame) — несущая конструкция, объединяющая все остальные компоненты. Она сделана так, чтобы совмещать в себе механическую прочность, жёсткость на изгиб и небольшой вес.
· Двигатели. В конструкции дронов применяются бесщеточные или обычные коллекторные моторы постоянного тока. Их задача — обеспечить необходимую тягу для подъёма летательного аппарата.
· Электронные регуляторы скорости (ESC) для управления вращением двигателей, по одному ESC на каждый мотор.
· Пропеллеры — пластиковые или деревянные воздушные винты, вращающиеся на валу двигателей.
· Аккумуляторы — источник питания для силовой установки квадрокоптера и электронного оборудования.
· Полётный контроллер — мозг беспилотника, координирующий работу всех узлов и агрегатов.
· Приёмник и передатчик аппаратуры радиоуправления.
· Различные дополнительные элементы, в зависимости от назначения дрона.
План работы
1) Приготовить все комплектующие будущего коптера
1. Аппаратура управления и приёмник (пульт FlySky–i6 и приёмник FS-iA6B*)
2. Аккумулятор (Объём заряда определяется по размеру, весу и значению коптера)
3. Зарядник для аккумулятора (imaxB6*)
4. Гоночный квадрокоптер это прежде всего вид от 1-го лица, поэтому на борту нам понадобятся FPVкамера и передатчик, а так же плата OSD** ()
5. На земле нам нужны будут FPVочки или шлем (Самый хороший среди дешёвых это EACHINEEV800)
6. Для лучшего качества приёма видео на поле или в лесу нужно взять 2 грибковидные антенны со входом «мама», а для полётов в помещении подходит стандартная дипольная антенна в виде палки.
7. Далее опционально нужна маленькая HD(Экшн)камера для записи ваших «крутых» полётов. (Не обязательно)
Самое важное:
8. Полётный контроллер (1 шт)
9. Регуляторы оборотов (4 шт)
10. Рама (Мы делаем гоночный, поэтому и берём 220 размер. Так же можно 250.)
11. Плата разводки
12. Двигатели 2200 KV (На корпусе двигателя всегда написаны KV, так вот, чем больше цифра, значит больше оборотов он сможет сделать, а значит на него нужно ставить лопасти меньшего размера, а еслиKV меньше, значит эти двигатели для грузового коптера, оборотов меньше, а значит и лопасти должны стоять больше, что бы «загребать» большое количество воздуха для подъёмной тяги.)
13. Пропеллеры 5х4х3. (5 – это размер в дюймах, 4 – это шаг, тоже в дюймах и 3 – это количество лопастей.)
* - это рекомендации
**Плата OSD – нужна для обработки полученного изображения от FPV камеры и вывода более лучшей картинки на FPV очки.
Принцип работы квадрокптера
Перед тем как приступить к сборке коптера нам нужно понять принцип работы квадрокоптера и разобраться в функциях всех его составляющих.
Полётный контроллер
Полётный контроллер, известный также под сокращением FC — это мозг беспилотного летательного аппарата, его бортовой компьютер, управляющий всеми остальными узлами и агрегатами дрона. Он представляет собой небольшую печатную плату с установленным на ней микропроцессором. Кроме процессора, контроллер обычно имеет набор встроенных датчиков, реагирующих на изменения положения квадрокоптера в пространстве. Для того чтобы удерживать дрон в воздухе, сохранять устойчивое равновесие и менять скорость и направление движения по требованию пилота, полётный контроллер принимает команды от бортового радиоприёмника и управляет двигателями. Это делается посредством специальных электронных регуляторов скорости ESC, которые изменяют силу тока, потребляемого моторами, в соответствии с цифровыми сигналами от FC.
Почти все полётные контроллеры содержат в себе встроенный контроль за перемещением на основе гироскопа и акселерометра. Кроме того, некоторые FC могут оснащаться более продвинутыми датчиками, например, барометрическим измерителем давления или магнитометром (компасом).
Полётный контроллер служит концентратором, к которому подключают другие периферийные устройства, применяемые в квадрокоптерах, такие как приёмник системы спутниковой навигации GPS, сигнальные светодиоды бортовых огней LED или ультразвуковые датчики для обнаружения препятствий. 
Двигатели
Двигатели квадрокоптера — это электромоторы постоянного тока. Они могут быть двух типов — обычные коллекторные и бесщеточные.  В недорогих дронах применяются более лёгкие щёточные модели, которые меньше весят, работают на более низких мощностях и значительно дешевле. Их приходится чаще менять, потому что они имеют меньший срок службы.Бесщеточный мотор похож на обычный двигатель постоянного тока. Его вал тоже приводится во вращение при взаимодействии обмотки и постоянных магнитов. Но у этого двигателя отсутствуют щётки на валу, которые переключают направление питания в катушках. Вместо этого, есть три катушки на внутреннем вращающемся сердечнике, который крепится к основанию.Снаружи имеется несколько магнитов, установленных на цилиндр, который прикреплён к вращающемуся валу. Таким образом, катушки жёстко закреплены и провода присоединяются непосредственно к ним, а необходимости в скользящих щётках нет. Нет потерь энергии, а большие обороты достигаются при меньшем расходе мощности. Бесколлекторные двигатели значительно эффективнее и надёжнее. В продаже есть много различных моделей электродвигателей, которые различаются по размеру и потреблению энергии, качеству и стоимости.
В недорогих дронах применяются более лёгкие щёточные модели, которые меньше весят, работают на более низких мощностях и значительно дешевле. Их приходится чаще менять, потому что они имеют меньший срок службы.Бесщеточный мотор похож на обычный двигатель постоянного тока. Его вал тоже приводится во вращение при взаимодействии обмотки и постоянных магнитов. Но у этого двигателя отсутствуют щётки на валу, которые переключают направление питания в катушках. Вместо этого, есть три катушки на внутреннем вращающемся сердечнике, который крепится к основанию.Снаружи имеется несколько магнитов, установленных на цилиндр, который прикреплён к вращающемуся валу. Таким образом, катушки жёстко закреплены и провода присоединяются непосредственно к ним, а необходимости в скользящих щётках нет. Нет потерь энергии, а большие обороты достигаются при меньшем расходе мощности. Бесколлекторные двигатели значительно эффективнее и надёжнее. В продаже есть много различных моделей электродвигателей, которые различаются по размеру и потреблению энергии, качеству и стоимости.
Пропеллеры
Вращающиеся винты создают тягу квадрокоптера, без которой невозможен полет. Они обычно изготавливаются из прочного пластика, иногда из углеродного волокна или даже из дерева. Несмотря на кажущуюся одинаковость, четыре винта квадрокоптера на самом деле разные. Если внимательно присмотреться, направление лопастей двух из них одних отличается от остальных. Это связано с тем, что половина из роторов дрона всегда вращается в противоположном направлении.  В продаже есть воздушные винты разного диаметра и с различным шагом (pitch). При выборе обязательно нужно учитывать размер рамы квадрокоптера и конкретную модель применяемых двигателей.
В продаже есть воздушные винты разного диаметра и с различным шагом (pitch). При выборе обязательно нужно учитывать размер рамы квадрокоптера и конкретную модель применяемых двигателей.
Радиоуправление
Квадрокоптер управляется по радио с помощью радиопередатчика (TX), а радиоприёмник (RX) — это небольшое бортовое устройство, которое получает от него команды. На основании этих команд полётный контроллер управляет электромоторами, чтобы аппарат поднимался в воздух, летел в нужном направлении или снижался. 
Аккумулятор
Литий-полимерные аккумуляторы LiPo являются основным источником питания квадрокоптеров. Технология LiPoиспользуется из-за высокой плотности энергии (ёмкости на единицу веса) и большой разрядный ток.  Все батареи LiPo рассчитаны на определённый номинал напряжения, который зависит от количества элементов, ёмкость и скорость разряда. Для правильной эксплуатации литий-полимерных аккумуляторов используются специальные зарядные устройства, которые имеют электронное управление. Это связано с необходимостью точной балансировки каждого из элементов питания в комплекте, чтобы они имели одинаковое напряжение.
Все батареи LiPo рассчитаны на определённый номинал напряжения, который зависит от количества элементов, ёмкость и скорость разряда. Для правильной эксплуатации литий-полимерных аккумуляторов используются специальные зарядные устройства, которые имеют электронное управление. Это связано с необходимостью точной балансировки каждого из элементов питания в комплекте, чтобы они имели одинаковое напряжение.
FPV камера
Камера FPV позволяет пилоту квадрокоптера использовать специальные очки (goggles) и наблюдать за полётом аппарата от первого лица. 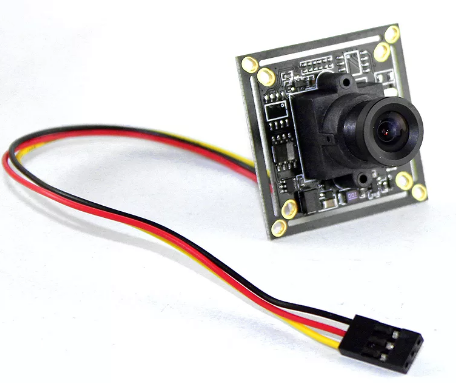 На FPV дронах часто устанавливают сразу две камеры — одну для потоковой передачи в реальном времени, а другую для записи кадров с качеством HD. Камеры FPV могут иметь не слишком высокое качество видео. Они предназначены для широкого динамического диапазона и должны работать с малыми задержками. Это чрезвычайно важно для полётов на высокой скорости.
На FPV дронах часто устанавливают сразу две камеры — одну для потоковой передачи в реальном времени, а другую для записи кадров с качеством HD. Камеры FPV могут иметь не слишком высокое качество видео. Они предназначены для широкого динамического диапазона и должны работать с малыми задержками. Это чрезвычайно важно для полётов на высокой скорости.
Дополнительные компоненты
Дополнительные компоненты для квадрокоптеров — это GPS-модули, ультразвуковые датчики, барометры, стабилизированные подвесы для камер (Gimbal) и многое другое. Они могут повысить качество вашего беспилотника, принести больше возможностей и сделать его более совершенным.

Рама
Ну и конечно же рама квадрокоптера. Это его силовая часть, на которой всё выше упомянутое установлено.
Рамы бывают разных размеров, например, 550, 450, 350, 250, 220, 195, 180 и т.д. Если объяснить очень просто, то чем меньше это число, тем меньше рама. Следовательно, гоночные квадрокоптеры – это 250 и ниже.  (на фото рама 250 размера)
(на фото рама 250 размера)
Сборка квадрокоптера
Вот наконец мы подошли к самому важному – это сборка. Давайте приступим.
Сборка рамы
Есть вероятность, что комплект деталей вам придет без инструкции по сборке рамы. Если так и произошло, то собираем по картинке или видео. На данной стадии не стоит затягивать все винты в «боевой режим», возможно, придется разобрать раму еще не раз. Верхнюю часть на данном этапе прикручивать вообще не стоит, без нее работать с внутренностями коптера удобнее. Также не стоит забывать про шайбы. 
Установка моторов
Очень простая операция, если помнить про направления вращения двигателей. Определитесь, где у вас будет перед. Моторы с черной гайкой, вращающиеся по часовой стрелке, ставим на переднее левое и заднее правое места.
Обратите внимание на крепление двигателей:

Пайка
Заключение
Вот мы и прошли процесс сборки гоночного квадрокоптера. Нужно помнить, что сборка каждого квадрокоптера отличается. Если вам, что-то не понятно, то вы можете спокойно найти нужную вам информацию в интернете.
Данная Инструкция по сборке гоночного квадрокоптера была создана для проектно-исследовательской работы.
Автор: Андреев Дмитрий
Продукт проектно-исследовательской работы





