Система является мультироторной. Эти самые роторы создают мощное диагональное вращение в противоположных направлениях. У роторов имеется так называемый управленец, собирающий информацию с трех или с шести гироскопов (количество последних зависит от конфигурации коптера) и передает ее роторам.
Гироскопы были созданы для того, чтобы автоматически определять положение аппарата во время полета и затем фиксировать его во всех трех плоскостях. При этом акселерометр делает так, чтобы коптер занял идеальное положение по горизонтали. Чтобы закрепить квадрокоптер на определенной высоте, полетная система оборудуется бародатчиком.
За счет этого происходит движение коптера, если все четыре винта крутятся одинаково. Результатом смены скорости вращения той или иной пары моторов становится наклон коптера (как его еще называют — «крен») в сторону наиболее слабо крутящихся винтов — дрон летит по горизонтали.
В большинстве случаев роторов строго четыре, но периодически вы можете встретить коптеры с шестью и даже восемью винтами. Поэтому их называют мультикоптерами, а слово «квадрокоптер» уже не будет актуальным к последним двум представителям мультироторных дронов.
Что такое квадрокоптер
Квадрокоптер — это разновидность многовинтового вертолёта с четырьмя роторами и беспилотный летательный аппарат, управляемый по радио. Он похож на вертолёт по принципу работы. Но из-за особенностей конструкции, квадрокоптеры более экономичны и намного проще в изготовлении, особенно небольшого размера. За счёт устойчивости и высоких лётных характеристик, их часто применяют для таких задач, как наблюдение с воздуха и аэрофотосъёмка. Размеры квадрокоптера могут быть различными — от умещающихся на ладони аппаратов весом в несколько грамм, до очень серьёзных машин, способных поднять в воздух пассажира.
Как летает квадрокоптер
У обычного вертолёта есть главный ротор, вращение которого обеспечивает подъёмную силу и небольшой хвостовой винт для компенсации аэродинамического крутящего момента, создаваемого несущими лопастями. Без него вертолёт не может лететь вперёд и будет вращаться так же быстро, как основной винт, но в противоположную сторону. В отличие от вертолёта, квадрокоптер имеет четыре винта, работающих одновременно, чтобы создать направленную вверх тягу. Каждый из этих пропеллеров обеспечивает четверть необходимой подъёмной силы. Поэтому можно использовать менее мощные двигатели, которые намного дешевле. Направление движения контролируется изменением тяги каждого из роторов. 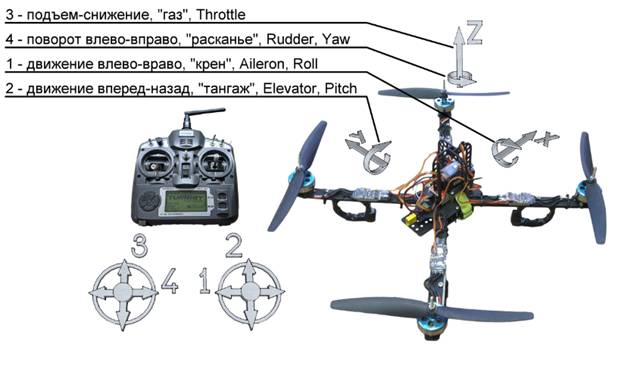
Винты квадрокоптера обычно расположены по квадрату. Два, находящиеся на противоположных сторонах квадрата, вращаются по часовой стрелке, а другие два в противоположном направлении. Если все роторы повернутся в одном направлении, летательный аппарат станет вращаться точно так же, как обычный вертолёт без хвостового ротора.
Чтобы балансировать в воздухе и сохранять горизонтальное положение, квадрокоптер должен постоянно контролировать состояние гироскопических датчиков уровня и корректировать скорость вращения каждого из роторов. Обычно это делается автоматически с помощью сложной системы управления на основе ПИД-регулятора. Качество работы компьютерного пропорционально-интегрально-дифференциального регулятора является основой любого дрона, обеспечивает его устойчивость и лётные характеристики. Подобно птице, самолёту или вертолёту, квадрокоптер имеет три дополнительных степени свободы. Это описанные ещё в XVIII веке Леонардом Эйлером углы тангажа, крена и рысканья (pitch/roll/yaw), которые определяют любое перемещение в трёхмерном пространстве.
Когда ориентация беспилотника меняется по любой из осей, гироскопы показывают угловое отклонение от начальной позиции. Бортовой компьютер запоминает исходное положение летательного аппарата и при помощи программного ПИД-регулятора управляет моторами для того, чтобы вернуть дрон в это исходное положение равновесия.
Если квадрокоптер уравновешен, можно свободно изменять его положение в пространстве. Например, для создания крена или тангажа тяга одного из четырёх роторов уменьшается, а противоположного — увеличивается на ту же величину. Это заставляет аппарат наклоняться. При наклоне вектор тяги роторов имеет горизонтальную и вертикальную составляющие. Это приводит к двум вещам:
· квадрокоптер движется в направлении, противоположном горизонтальной составляющей тяги;
· поскольку вектор тяги разделен, его вертикальная составляющая стала меньше и аппарат начинает терять высоту.
Чтобы дрон не упал при крене или тангаже, необходимо увеличить тягу каждого ротора для компенсации снижения. Изменения по каждой из степени свободы, должны быть скоординированы для движения в нужном направлении.
Все это делается автоматически с помощью полётного контроллера. Единственное, что требуется от пилота — передать по радио команду, в каком направлении развернуться и куда лететь. Более совершенные беспилотники, кроме радиоуправления, оснащают системой навигации GPS и могут летать на автопилоте.






