Методические указания
к выполнению практических работ по
ОП.09 Электрические машины и приводы
Специальность: 15.02.10 Мехатроника и мобильная робототехника (по отраслям)
Юрга
Методические указания к выполнению практических работ составлены на основании рабочей программы учебной дисциплины ОП.09 Электрические машины и приводы
Рассмотрена и одобрена
На заседании цикловой методической комиссии
дисциплин технического профиля
Протокол № ___ от ____________ 20___г.
Председатель ЦМК ____________
Автор-составитель
Преподаватель _____________/ С.И. Худякова
Содержание
| Пояснительная записка………………………………………………...
| 4
|
| Критерии оценки выполнения обучающимися практических работ
| 5
|
| Практические работы:
|
|
| 1
| Определение параметров машины постоянного тока (МПТ)
| 6
|
| 2
| Исследование работы двигателя постоянного тока параллельного возбуждения.
| 8
|
| 3
| Построение развёрнутой и электрической схем простой петлевой обмотки.
| 11
|
| 4
| Построение развёрнутой и электрической схем простой волновой обмотки.
| 13
|
| 5
| Расчет и построение механической характеристики ДПТ НВ
| 15
|
| 6
| Построение механических характеристик ДПТ ПВ
| 18
|
| 7
| Расчет пусковых реостатов ДПТ НВ
| 20
|
| 8
| Определение параметров АД по маркировке и паспортным данным.
| 22
|
| 9
| Расчет и построение механической характеристики АД
| 25
|
| 10
| Прямой пуск трёхфазного асинхронного двигателя с короткозамкнутым ротором, осуществление реверса
| 27
|
| 11
| Расчет пусковых реостатов для АД с фазным ротором
| 29
|
| 12
| Изучение конструкции и принципа действия СД
| 32
|
| 13
| Выбор мощности синхронного компенсатора.
| 36
|
| 14
| Расчёт параметров однофазного трансформатора.
| 38
|
| 15
| Расчёт параметров трёхфазного трансформатора.
| 40
|
| Список источников
| 43
|
Пояснительная записка
Методические указания к выполнению практических работ ОП.09 Электрические машины и приводы предназначены для студентов, обучающихся по специальности 15.02.10 Мехатроника и мобильная робототехника (по отраслям). Методические указания к выполнению практических работ составлены в соответствии с рабочей программой программы учебной дисциплины ОП.09 Электрические машины и приводы.
Рабочей программой ОП.09 Электрические машины и приводы (далее - программой) предусматривается изучение обучающимися устройства и назначения электрических машин и аппаратов.
ОП.09 Электрические машины и приводы направлена на формирование следующих компетенций:
ОК1. Выбирать способы решения задач профессиональной деятельности, применительно к различным контекстам.
ОК2. Осуществлять поиск, анализ и интерпретацию информации, необходимой для выполнения задач профессиональной деятельности.
ОК3. Планировать и реализовывать собственное профессиональное и личностное развитие.
ПК 1.4. Выполнять работы по наладке компонентов и модулей мехатронных систем в соответствии с технической документацией.
ПК 2.1. Осуществлять техническое обслуживание компонентов и модулей
Программой предусматривается выполнение и проведение практических занятий.
Практическая работа обеспечивает закрепление студентом знаний, полученных во время аудиторных занятий.
Методические указания к практическим работам содержат:
- краткие теоретические сведения по теме практических работ;
- практическую часть, задания для выполнения практических работ, алгоритм выполнения практических работ;
- контрольные вопросы для самопроверки и закрепления знаний по теме практической работы.
Методические указания включают 15 практических работ. Практические работы 9, 11 рассчитаны на 4 часа, остальные работы рассчитаны на 2 часа.
Для формирования умений обучающийся должен знать:
технические параметры, характеристики и особенности различных видов электрических машин мехатронных систем;
- классификацию основного оборудования мехатронных систем;
- физические принципы работы, конструкцию, технические характеристики, области применения, правила эксплуатации оборудования мехатронных систем.
В результате выполнения практических работ у обучающихся будут сформированы умения:
определять электроэнергетические параметры электрических машин и аппаратов, мехатронных систем:
- проводить анализ неисправностей электрооборудования;
- эффективно использовать материалы и оборудование;
- заполнять маршрутно-технологическую документацию на эксплуатацию и обслуживание отраслевого оборудования мехатронных систем;
- оценивать эффективность работы электрического и электромеханического оборудования.
Практическая работа оформляется в отдельной тетради для практических работ. Отчет о практической работе должен содержать: название практической работы, цель практической работы, выполненные и оформленные задания с подробным решением, вывод о проделанной работе. В ходе защиты отчета о практической работе обучающийся должен ответить на контрольные вопросы.
Содержание отчета
Номер, тема и цель работы.
Решение задачи с пояснениями.
Ответы на контрольные вопросы.
Практическая работа № 2
Тема: Изучение устройства и принципа действия ДПТ с ПВ
Цель: Изучить устройство, принцип действия и механические характеристики ДПТ с ПВ
Материалы и оборудование: чертежные принадлежности, методические указания.
Формируемые умения: У1 определять электроэнергетические параметры электрических машин н аппаратов, электротехнических устройств и систем, У5 эффективно использовать материалы и оборудование
Норма времени: 2
Основные сведения
Двигатели постоянного тока последовательного возбуждения широко применяют на электротранспорте, в приводе подъемно-транспортных механизмов. Необходимо отметить, что такие двигатели применяют в качестве стартеров для двигателей внутреннего сгорания. Двигатели последовательного возбуждения надежны по сравнению с другими машинами постоянного тока, так как они имеют обмотку возбуждения, выполненную проводом большого сечения, и с малыми напряжениями между витками.
Схема включения в сеть приведена на рис.1, откуда видно, что ток возбуждения равен току якоря, который зависит от нагрузки двигателя. Во время работы ток якоря изменяется от холостого хода до номинального значения (и более), следовательно, изменяется и поток возбуждения.
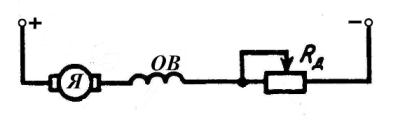
Рис. 1. Схема включения ДПТ ПВ: ОВ – обмотка возбуждения; Я – обмотка якоря.
Магнитный поток Ф в нем зависит от тока нагрузки I = Ia = Iв. При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна, т. е. Ф = kф Ia (kф — коэффициент пропорциональности). В этом случае найдем электромагнитный момент:

Формула частоты вращения примет вид
На рис. 2, б представлены рабочие характеристики M = F(I) и n= (I) двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.
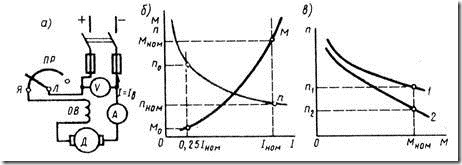
Рис. 2. Двигатель последовательного возбуждения:
а — принципиальная схема; б — рабочие характеристики; в — механические характеристики; 1 — естественная характеристика; 2 — искусственная характеристика
При уменьшении нагрузки двигателя последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты и зубчатой передачи. Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20% сверх максимальной, указанной на заводском щите, но не меньше чем на 50% сверх номинальной.
Механические характеристики двигателя последовательного возбуждения n=f(M) представлены на рис. 2, в. Резко падающие кривые механических характеристик (естественная 1 и искусственная 2) обеспечивают двигателю последовательного возбуждения устойчивую работу при любой механической нагрузке. Свойство этих двигателей развивать большой вращающий момент, пропорциональный квадрату тока нагрузки, имеет важное значение, особенно в тяжелых условиях пуска и при перегрузках, так как с постепенным увеличением нагрузки двигателя мощность на его входе растет медленнее, чем вращающий момент. Эта особенность двигателей последовательного возбуждения является одной из причин их широкого применения в качестве тяговых двигателей на транспорте, а также в качестве крановых двигателей в подъемных установках, т. е. во всех случаях электропривода с тяжелыми условиями пуска и сочетания значительных нагрузок на вал двигателя с малой частотой вращения.
Номинальное изменение частоты вращения двигателя последовательного возбуждения

Где n[0,25] — частота вращения при нагрузке двигателя, составляющей 25% от номинальной.
Частоту вращения двигателей последовательного возбуждения можно регулировать изменением либо напряжения U, либо магнитного потока обмотки возбуждения. В первом случае в цепь якоря последовательно включают регулировочный реостат Rрг (рис. 2.10, а). С увеличением сопротивления этого реостата уменьшаются напряжение на входе двигателя и частота его вращения.
Этот метод регулирования применяют главным образом в двигателях небольшой мощности. В случае значительной мощности двигателя этот способ неэкономичен из-за больших потерь энергии в Rрг. Кроме того, реостат Rрг, рассчитываемый на рабочий ток двигателя, получается громоздким и дорогостоящим.
При совместной работе нескольких однотипных двигателей частоту вращения регулируют изменением схемы их включения относительно друг друга (рис. 2.10, б). Так, при параллельном включении двигателей каждый из них оказывается под полным напряжением сети, а при последовательном включении двух двигателей на каждый двигатель приходится половина напряжения сети. При одновременной работе большего числа двигателей возможно большее количество вариантов включения. Этот способ регулирования частоты вращения применяют в электровозах, где установлено несколько одинаковых тяговых двигателей.
Изменение подводимого к двигателю напряжения возможно при питании двигателя от источника постоянного тока с регулируемым напряжением. При уменьшении подводимого к двигателю напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны (рис. 2.11).
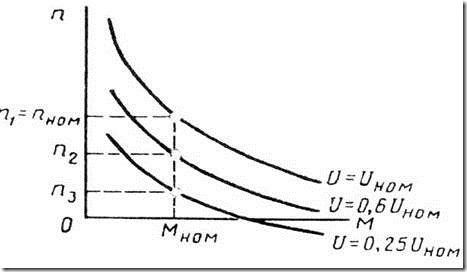
Рис. 2.11. Механические характеристики двигателя последовательного возбуждения при изменении подводимого напряжения
Регулировать частоту вращения двигателя изменением магнитного потока можно тремя способами: шунтированием обмотки возбуждения реостатом rрг, секционированием обмотки возбуждения и шунтированием обмотки якоря реостатом rш. Включение реостата rрг, шунтирующего обмотку возбуждения (рис. 29.10, в), а также уменьшение сопротивления этого реостата ведет к снижению тока возбуждения Iв = Ia — Iрг, а следовательно, к росту частоты вращения. Этот способ экономичнее предыдущего (см. рис. 29.10, а), применяется чаще и оценивается коэффициентом регулирования

Обычно сопротивление реостата rрг принимается таким, чтобы kрг >= 50%.
При секционировании обмотки возбуждения (рис. 2.10, г) отключение части витков обмотки сопровождается ростом частоты вращения. При шунтировании обмотки якоря реостатом rш (см. рис. 2.10, в) увеличивается ток возбуждения Iв = Ia+Iрг, что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.
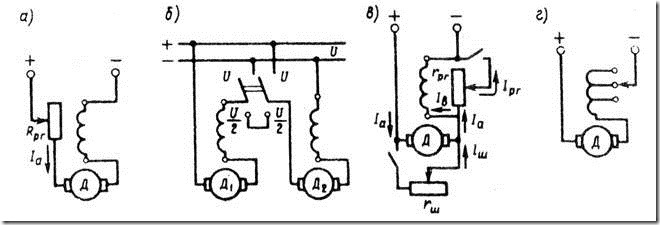
Рис. 2.10. Регулирование частоты вращения двигателей последовательного возбуждения.
Порядок выполнения работы
1 Изучить теоретические сведения
2 Ответить на контрольные вопросы
Контрольные вопросы:
1 Устройство двигателя постоянного тока последовательного возбуждения
2 От чего зависит магнитный поток?
3 Что показывают характеристики механизма?
4 Особенность ДПТ с ПВ
5 Способы регулирования скорости ДПТ с ПВ
6 Где применяют двигатели постоянного тока последовательного возбуждения?
Содержание отчета
Наименование и цель работы.
Схемы экспериментальных установок.
Таблицы с результатами измерений.
Графические материалы - характеристики.
Выводы о соответствии результатов эксперимента теоретическим положениям.
Практическая работа № 3
Тема: Построение развернутой и электрической схем простой петлевой обмотки
Цель: Определить параметры обмотки, построить развернутую и электрическую схемы простой петлевой обмотки
Материалы и оборудование: чертежные принадлежности, методические указания.
Формируемые умения: У1 определять электроэнергетические параметры электрических машин и аппаратов, электротехнических устройств и систем:
Норма времени: 2 часа
Теоретическая часть
В простой петлевой обмотке якоря каждая секция присоединена к двум рядом лежащим коллекторным пластинам. При укладке секций на сердечнике якоря начало каждой последующей секции соединяется с концом предыдущей, постепенно перемещаясь при этом по поверхности якоря (и коллектора) так, что за один обход якоря укладывают все секции обмотки. В результате конец последней секции оказывается присоединенным к началу первой секции, т. е. обмотка якоря замыкается.
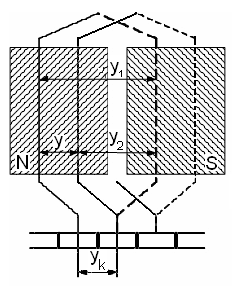
Рисунок 1. Простая петлевая обмотка
Ширина секции, выраженная в элементарных пазах, называется первым частичным шагом – y1, т.е. это расстояние между начальной и конечной сторонами секции; y2 – второй частичный шаг, расстояние между конечной стороной одной секции и начальной следующей секции; yk – шаг по коллектору измеряется в коллекторных (пластинах) делениях, показывает смещение мест отпаек секций
По данным приведенным в таблице 1 рассчитать параметры и начертить развернутую схему простой петлевой обмотки. На схеме обозначить полюсы, расставить щетки и задавшись направлением вращения якоря определить полярность щеток в генераторном режиме. Выполнить электрическую схему.
Обмотка правоходная
Таблица1 – Данные вариантов
| Известные величины
| Варианты
|
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
|
| Число пазов сердечника якоря, Z
| 6
| 8
| 10
| 12
| 14
| 16
| 18
| 20
| 22
| 24
|
| Число полюсов, (2р)
| 2
| 2
| 2
| 2
| 2
| 4
| 4
| 4
| 4
| 4
|
Порядок выполнения работы:
1 Определить первый частичный шаг обмотки по якорю
y1=Zэ / (2р) + ɛ
2 Определить второй шаг по якорю
у2=у1 + у = у1 + 1
3 Строим развернутую схему обмотки:
- отметить и пронумеровать все пазы и секции
- нанести контуры магнитных полюсов (зеркальное отображение)
- изобразить коллекторные пластины
- нанести секции согласно расчетов
Последняя секция должна замкнуть обмотку, что говорит о правильном выполнении схемы.
- изобразить щетки
Расстояние между щетками должно быть равно К/(р) – полюсное деление.
- определить направление ЭДС в секциях, предварительно задавшись направлением вращения якоря, считая что машина работает в генераторном режиме.
4 Изобразить электрическую схему обмотки
- нанести токи в ветвях и результирующий ток
- для простой петлевой обмотки Iа=2а*iа
где 2а – число параллельных ветвей обмотки якоря;
iа – ток одной параллельной ветви.
Число параллельных ветвей для данной обмотки равно числу главных полюсов машины
2а=2р
5 Сделать вывод.
Контрольные вопросы:
1 Каково назначение коллектора в генераторе и двигателе?
2 Какими параметрами характеризуется обмотка якоря?
3 Из какого материала выполняется обмотка якоря?
Содержание отчета
1 Номер, тема и цель работы.
2 Решение задачи с пояснениями.
3 Ответы на контрольные вопросы.
Практическая работа № 4
Тема: Построение развернутой и электрической схем простой волновой обмотки
Цель: Определить параметры обмотки, построить развернутую и электрическую схемы простой волновой обмотки
Материалы и оборудование: чертежные принадлежности, методические указания.
Формируемые умения: У1 определять электроэнергетические параметры электрических машин и аппаратов, электротехнических устройств и систем:
Норма времени: 2 часа
Теоретическая часть
Простой волновой обмоткой называется обмотка, в которой последовательно соединяются секции, находящиеся под разными парами полюсов. При этом расстояние между коллекторными пластинами, к которым присоединяются концы секции (рисунок 1), примерно равно двойному полюсному делению

т.е. за один обход по якорю укладывается столько секций, сколько пар полюсов имеет машина. При этом конец последней по обходу секции присоединяют к коллекторной пластине, расположенной рядом с исходной слева или справа. В зависимости от этого обмотку называют левоходовой или правоходовой. Обычно применяют левоходовую обмотку.
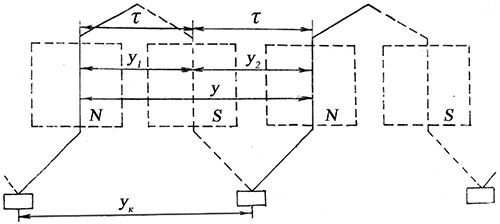
Рисунок 1 - Простая волновая обмотка
За один обход перемещаются по коллектору на p·yк коллекторных делений. Следовательно,
(–) – для левоходовой обмотки;
(+) – для правоходовой обмотки.
Отсюда определяется шаг обмотки по коллектору

Продолжая в том же порядке укладывать секции, мы замкнем обмотку на исходной коллекторной пластине. Исходя из принципа соответствия хода обмотки по якорю и коллектору, результирующий шаг обмотки

Первый частичный шаг определяется по известной формуле
Определяем второй частичный шаг. Из рисунка 1

По данным приведенным в таблице 1 рассчитать параметры и начертить развернутую схему простой волновой обмотки. На схеме обозначить полюсы, расставить щетки и задавшись направлением вращения якоря определить полярность щеток в генераторном режиме. Выполнить электрическую схему.
Обмотка левоходная.
Таблица1 – Данные вариантов
| Известные величины
| Варианты
|
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
|
| Число пазов сердечника якоря, Z
| 11
| 15
| 17
| 19
| 21
| 23
| 25
| 29
| 27
| 33
|
| Число полюсов, (2р)
| 2
| 4
| 4
| 4
| 4
| 4
| 6
| 4
| 4
| 8
|
Порядок выполнения работы:
1 Определить первый частичный шаг обмотки по якорю
y1=Zэ / (2р) + ɛ
2 Определить шаг по коллектору
ук = у = (К + 1) / р
3 Определить второй шаг по якорю
у2 = у – у1
4 Строим развернутую схему обмотки:
- отметить и пронумеровать все пазы и секции
- нанести контуры магнитных полюсов (зеркальное отображение)
- изобразить коллекторные пластины
- нанести секции согласно расчетов
Последняя секция должна замкнуть обмотку, что говорит о правильном выполнении схемы.
- изобразить щетки
Расстояние между щетками должно быть равно К/(р) – полюсное деление.
- определить направление ЭДС в секциях, предварительно задавшись направлением вращения якоря, считая что машина работает в генераторном режиме.
4 Изобразить электрическую схему обмотки
- нанести токи в ветвях и результирующий ток
- для простой петлевой обмотки Iа=2а*iа
где 2а – число параллельных ветвей обмотки якоря;
iа – ток одной параллельной ветви.
Число параллельных ветвей для данной обмотки равно числу главных полюсов машины
2а=2р
5 Сделать вывод.
Контрольные вопросы:
1 Перечислить части из которых состоит МПТ
2 Что такое обратимость?
Содержание отчета
1 Номер, тема и цель работы.
2 Решение задачи с пояснениями.
3 Ответы на контрольные вопросы.
Практическая работа № 5
Тема: Расчет и построение механической характеристики ДПТ НВ
Цель: Научиться рассчитывать и строить механические характеристики ДПТ НВ
Материалы и оборудование: чертежные принадлежности, методические указания.
Формируемые умения: У1 определять электроэнергетические параметры электрических машин и аппаратов, электротехнических устройств и систем:
Норма времени: 2 часа
Основные сведения
Содержание отчета
Номер, тема и цель работы.
Решение задачи с пояснениями.
Ответы на контрольные вопросы.
Практическая работа № 6
Тема: Построение механических характеристик ДПТ ПВ
Цель: Рассчитать и построить естественную механическую и искусственную электромеханическую характеристики ДПТ ПВ.
Материалы и оборудование: чертежные принадлежности, методические указания.
Формируемые умения: У1 определять электроэнергетические параметры электрических машин и аппаратов, электротехнических устройств и систем:
Норма времени: 2 часа
Краткие теоретические сведения:
При увеличении сопротивления двигателя за счет введения добавочного сопротивления скорость двигателя уменьшается. Искусственные характеристики при введении в якорь добавочного резистора располагаются ниже естественной, причем, чем больше величина добавочного сопротивления, тем больше снижается скорость двигателя.
Таблица 1 Данные для расчетов
| Вар.
| 1
| 2
| 3
| 4
| 5
| 6
| 7
| 8
| 9
| 10
| 11
| 12
|
| Rд
| 0,1
| 0,15
| 0,2
| 0,26
| 0,3
| 0,34
| 0,4
| 0,05
| 0,4
| 0,22
| 0,45
| 0,5
|
Порядок выполнения работы:
Определим скорость и момент двигателя
ωном=(2π nном)/60
Мном=Рном/ ωном
Используя универсальные характеристики ДПТ ПВ заполнить таблицу 2
| I*
| 0,4
| 0,8
| 1,2
| 1,6
| 2
|
| M*
|
|
|
|
|
|
| ω*
|
|
|
|
|
|
| I
|
|
|
|
|
|
| M
|
|
|
|
|
|
| ω
|
|
|
|
|
|
| ωи
|
|
|
|
|
|
I*= I/ Iном; M*=М/Мном; ω*= ω/ ωном
По полученным данным построить естественную механическую характеристику ω=f(М)
Рассчитать и построить искусственную электромеханическую характеристику ωи=f(I)
Уравнение искусственной электромеханической характеристики имеет вид:


Содержание отчета
Номер, тема и цель работы.
Решение задачи с пояснениями.
Вывод
Практическая работа № 7
Тема: Расчет пусковых сопротивлений двигателя ДПТ ПВ
Цель работы: Изучить методику расчета и вычислить пусковые сопротивления ДПТ с ПВ
Материалы и оборудование: чертежные принадлежности, методические указания.
Формируемые умения: У1 определять электроэнергетические параметры электрических машин и аппаратов, электротехнических устройств и систем:
Норма времени: 2 часа
Основные сведения
Пуск двигателя постоянного тока прямым включением его на напряжение сети допустим только для двигателей небольшой мощности. При этом пик тока в начале пуска может быть порядка 4 — 6-кратного номинального. Прямой пуск двигателей постоянного тока значительной мощности совершенно недопустим, потому что начальный пик тока здесь будет равен 15 — 50-кратному номинальному. Поэтому пуск двигателей средних и больших мощностей производят при помощи пускового реостата, который ограничивает ток при пуске до допустимых по коммутации и механической прочности значений.
Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря. После пуска это сопротивление выводят, и машина продолжает работать в номинальном режиме на своей естественной характеристике.
Наиболее распространенным методом определения пусковых сопротивлений этих двигателей является метод лучевой диаграммы (рисунок 12) который заключается в следующем.
Задавшись, как и для двигателей параллельного возбуждения, значениями максимального и минимального пусковых токов, находим на естественной электромеханической характеристике 
Для построения пусковой диаграммы необходимо задаться максимальным пусковым током

и током переключения (минимальным пусковым током)

точки д и е соответствующие этим токам. Через точки д и е проводим прямую и продолжаем ее во второй квадрант координатой плоскости.

В момент пуска общее сопротивление цепи якоря RОБЩ двигателя (точка а) будет
С другой стороны, 
откуда пусковое сопротивление 
По значению включенного в цепь якоря пускового сопротивления rП определяем скорость ωБ, до которой двигатель разгоняется на первой пусковой характеристике (от точки а до точки б), пока ток уменьшается от максимального значения I1 до тока переключения I2:

где ωЕ – скорость двигателя на естественной характеристике при токе I2 (соответствующая точке е).
Через точки а и б проводим прямую до пересечения с продолжением отрезка де в точке к. Воспользовавшись этой точкой, строим пусковую диаграмму, из которой определяем число пусковых ступеней (в нашем случае две). Лучи, выходящие из точки к, между точками I1 и I2 определяют собой спрямленные отрезки пусковых электромеханических характеристик двигателя.
Для некоторого постоянного значения тока и, следовательно, постоянного потока уравнения электромеханической характеристики двигателя для сопротивлений rДВ и RОБЩ можно записать так:

Вычтя из первого уравнения второе, получим
Для тока I1 уравнение (68) примет вид

Найдя масштаб сопротивлений
определим значение сопротивлений пусковых ступеней
Согласно варианта рассчитать пусковые сопротивления
Сделать вывод и ответить на контрольные вопросы
Контрольные вопросы:
1 Особенность ДПТ ПВ
2 Что называют естественной механической характеристикой?
3 Назначение пусковых реостатов
Содержание отчета
Номер, тема и цель работы.
Данные своего варианта и схема генератора постоянного тока параллельного возбуждения.
Практическая работа № 8
Тема: Определение параметров АД по маркировке и паспортным данным
Цель: Определить параметры трехфазного асинхронного двигателя с короткозамкнутым ротором
Материалы и оборудование: справочные данные по двигателям, методические указания.
Формируемые умения: У1 определять электроэнергетические параметры электрических машин и аппаратов, электротехнических устройств и систем:
Норма времени: 2 часа
Теоретические сведения
В настоящее время перед потребителем часто встает вопрос - как расшифровать маркировку электродвигателя. Раньше такой вопрос практически не стоял из-за того, что маркировка электродвигателей не различалась в зависимости от завода-производителя и регламентировалась нормативными документами.
Основные типы двигателей назывались А, А2, АО2, 4А, 4АМ. Отличались по маркировке электродвигатели производимые в странах СЭВ, например, в Болгарии вместо маркировки 4АМ использовалась "МО" и вместо 4АМН - "М".
Сейчас многие заводы-изготовители использует свою маркировку. Приведем основные типы обозначений марок общепромышленных низковольтных асинхронных электродвигателей разных производителей.
Маркировка состоит из нескольких основных частей:
1. Марка
2.  Признак модификации
Признак модификации
3. Высота оси вращения
4. Установочный размер по длине станины
5. Длина сердечника
6. Число полюсов
7. Признак по назначению (конструктивная модификация)
8. Климатическое исполнение
9. Категория размещения
1. Марка электродвигателя (электродвигатели всех марок одинаковы по присоединительным размерам и в большинстве случаев, при прочих равных условиях, взаимозаменяемы, т.е. если у вас установлен двигатель АДМ90L2У3, то его можно заменить на электродвигатель марки АД90L2У3, А90L2У3 или АИР90L2У3):
- во времена Советского Союза
- с 1949 г. - А (IP23), АО (IP44)
- с 1961 г. - А2 (IP23), АО2 (IP44)
- с 1975-1980 - 4А (IP44), 4АН (IP23), 4АМ (IP44), 4АМН (IP23)
- с 1985-1995 - АИР (IP44, IP54), 5АН (IP23), 5АМН (IP23)
- в настоящее время: АИР, А, 5А, 5АМ, 5АМХ, АД, АДМ, АИРМ, (АО3, АО4 выпускаются ЗАО "БЭМЗ"):
2. Признак модификации (может применяться одновременно несколько обозначений в одной марке, ниже приведен не полный перечень).
· С - с повышенным скольжением
· Е, 3Е, ЕУ - однофазный двигатель
· В - встраиваемый
· П – пристраеваемый
· М - модернизированный
· Х - с алюминиевой станиной
· К - с фазным ротором
· Р - с повышенным пусковым моментом
· Ф - с принудительным охлаждением
3. Высота оси вращения.
В соответствии с ГОСТ13267, ряд высот оси вращения - 50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355.
4. Установочный размер по длине станины.
По возрастанию: S, M, L. (от английских слов: Short, Medium, Long)
Также возможно отсутствие обозначения при единственном установочном размере по длине станины в одной высоте оси вращения.
5. Длина сердечника при одном и том же установочном размере.
По возрастанию: А, В, С.
6. Число полюсов (или частота вращения).
2, 4, 6, 8, 10, 12 или в случае многоскоростных электродвигателях: 2/4, 8/6/4, и т.д.
7. Признак по назначению (может применяться одновременно несколько обозначений в одной марке).
· Б - со встроенной температурной защитой
· Б1 - с датчиком температуры подшипника
· Б2 - с датчиком и конденсаторным подогревателем
· Е - со встроенным тормозом
· Е2 - с тормозом с ручным растормаживающим устройством
· Ж, Ж1, Ж2 - со специальным выходным концом вала
· РЗ - для мотор-редукторов
· Ш - для промышленных швейных машин (также применяется в марке 5АН для специального исполнения по конструкции для насосов)
· П - повышенной точности по установочным размерам
· Ф - хладономаслостойкое обозначение
· А - для атомных электростанций
· Х2 - химостойкие
· Л - для лифтов
· С - для станков-качалок
· СШ - для сушильных шкафов
· Н - малошумные
· К - по нормам CENELEK
· и т.д.
Климатическое исполнение.
У, УХЛ, ХЛ, Т,... - смотрите ГОСТ15150.
Категория размещения.
1, 2, 3, 4,... - смотрите ГОСТ15150.
Для того чтобы заказать электродвигатель недостаточно указать правильную маркировку.
Необходимо указывать:
· IM - монтажное исполнение
· напряжение питания (220/380, 380, 380/660)
· IP - степень защиты (23, 44, 54, 55)
Порядок выполнения работы
1 Расшифровать марку двигателя, при необходимости воспользоваться любым электротехническим справочником
2 Определить мощность потребляемую двигателем Р2, кВт
η = Р2 /Рном
3 Определить номинальное скольжение
s = (n1 – n2) /n1
4 определить моменты М, Нм:
Мном = 9,55Р2 / n2
Ммах
Мп
5 Определить пусковой ток, Iп, А
Контрольные вопросы:
1 Почему двигатель называют асинхронным?
2 Какое поле создается обмоткой статора асинхронного двигателя?
3 Назовите типы роторов АД.
Содержание отчета
1 Номер, тема и цель работы.
2 Данные своего варианта
3 Решение с пояснениями.
4 Ответы на контрольные вопросы
Практическая работа № 9
Тема: «Расчет и построение механически






